The document focuses on eigenvalues and eigenvectors in linear algebra, detailing their geometrical interpretation, methods of determination, and the properties of related matrices such as symmetric and orthogonal matrices. It presents mathematical definitions, examples, and applications including how to calculate eigenvalues and eigenvectors for given matrices. Key concepts include diagonalization, algebraic and geometric multiplicity, and quadratic forms.
![Linear Algebra
Eigenvalues and
Eigenvectors
Shambhu Sharan
Eigenvalues and
Eigenvectors
Motivation
Geometrical interpretation
Determination of eigenvalues
and eigenvectors
Algebraic and geometric
multiplicity, Defect
Symmetric, Skew-Symmetric,
and Orthogonal Matrices
Diagonalization of
Matrices
Similar matrices
Eigenvalues and eigenvectors
of similar matrices
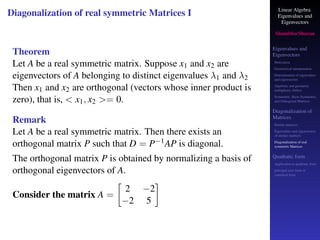
Diagonalization of real
symmetric Matrices
Quadratic form
Application to quadratic form
principal axes form or
canonical form
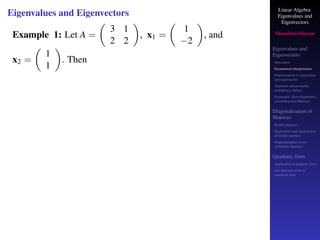
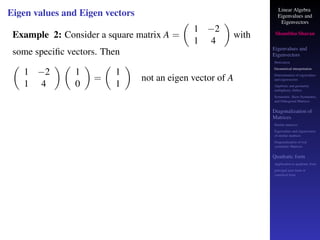
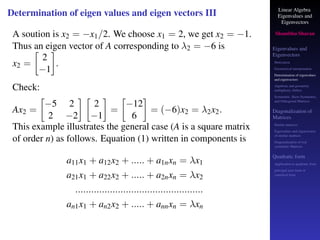
Eigen values and Eigen vectors
Let A = [aij] be a given n × n matrix. Consider the vector
equation
Ax = λx. (1)
Here x is an unknown vector and λ an unknown scalar. Our
task is to determine x’s and λ’s that equation (1).
Geometrically, solving eq. (1) in this way means that we are
looking for vectors x for which the multiplication of x by the
matrix A has the same effect as the multiplication of x by a
scalar A, giving a vector Ax with components proportional to
those of x, and A as the factor of proportionality.](https://image.slidesharecdn.com/pptonug-pglevel-240925153808-cd410ada/85/PPT-on-Eigen-values-and-Eigen-vectors-pdf-3-320.jpg)
![Linear Algebra
Eigenvalues and
Eigenvectors
Shambhu Sharan
Eigenvalues and
Eigenvectors
Motivation
Geometrical interpretation
Determination of eigenvalues
and eigenvectors
Algebraic and geometric
multiplicity, Defect
Symmetric, Skew-Symmetric,
and Orthogonal Matrices
Diagonalization of
Matrices
Similar matrices
Eigenvalues and eigenvectors
of similar matrices
Diagonalization of real
symmetric Matrices
Quadratic form
Application to quadratic form
principal axes form or
canonical form
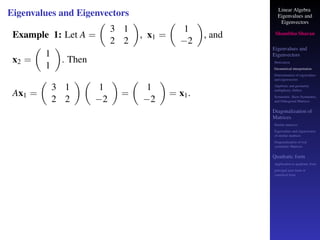
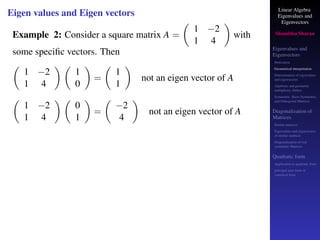
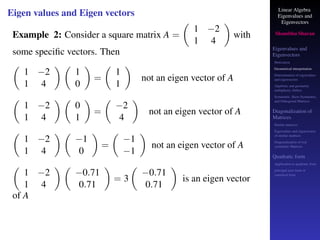
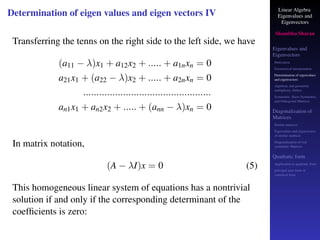
Eigen values and Eigen vectors
Let A = [aij] be a given n × n matrix. Consider the vector
equation
Ax = λx. (1)
Here x is an unknown vector and λ an unknown scalar. Our
task is to determine x’s and λ’s that equation (1).
Geometrically, solving eq. (1) in this way means that we are
looking for vectors x for which the multiplication of x by the
matrix A has the same effect as the multiplication of x by a
scalar A, giving a vector Ax with components proportional to
those of x, and A as the factor of proportionality.
Clearly, the zero vector x = 0 is a solution of (1) for any value
of λ, because A0 = 0 (this is of no interest).](https://image.slidesharecdn.com/pptonug-pglevel-240925153808-cd410ada/85/PPT-on-Eigen-values-and-Eigen-vectors-pdf-4-320.jpg)
![Linear Algebra
Eigenvalues and
Eigenvectors
Shambhu Sharan
Eigenvalues and
Eigenvectors
Motivation
Geometrical interpretation
Determination of eigenvalues
and eigenvectors
Algebraic and geometric
multiplicity, Defect
Symmetric, Skew-Symmetric,
and Orthogonal Matrices
Diagonalization of
Matrices
Similar matrices
Eigenvalues and eigenvectors
of similar matrices
Diagonalization of real
symmetric Matrices
Quadratic form
Application to quadratic form
principal axes form or
canonical form
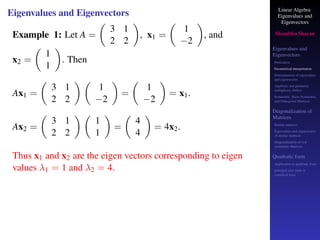
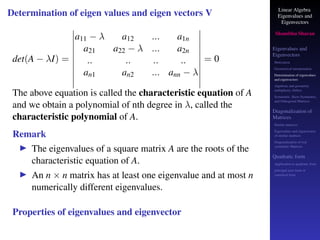
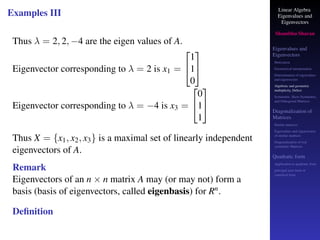
Examples II
x2 =
1
0
1
Eigenvector corresponding to λ = 5 is x3 =
1
2
1
Thus X = {x1, x2, x3} = {[1 − 1 0]T, [1 0 1]T, [1 2 1]T} is a
maximal set of linearly independent eigenvectors of A.
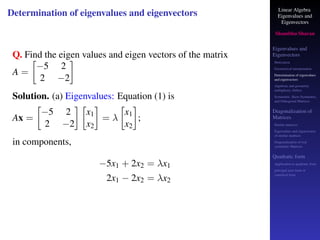
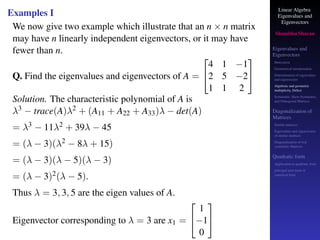
Q. Find the eigen values and eigenvectors of A =
3 −1 1
7 −5 1
6 −6 2
Solution. The characteristic polynomial of A is
λ3 − trace(A)λ2 + (A11 + A22 + A33)λ − det(A)
= λ3 − 12λ − 16
= (λ − 2)2(λ + 4).](https://image.slidesharecdn.com/pptonug-pglevel-240925153808-cd410ada/85/PPT-on-Eigen-values-and-Eigen-vectors-pdf-26-320.jpg)
![Linear Algebra
Eigenvalues and
Eigenvectors
Shambhu Sharan
Eigenvalues and
Eigenvectors
Motivation
Geometrical interpretation
Determination of eigenvalues
and eigenvectors
Algebraic and geometric
multiplicity, Defect
Symmetric, Skew-Symmetric,
and Orthogonal Matrices
Diagonalization of
Matrices
Similar matrices
Eigenvalues and eigenvectors
of similar matrices
Diagonalization of real
symmetric Matrices
Quadratic form
Application to quadratic form
principal axes form or
canonical form
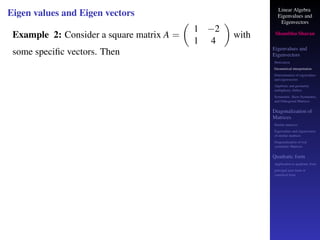
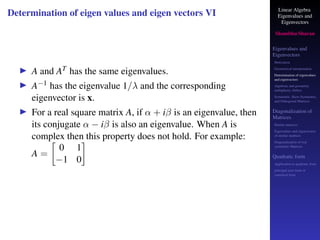
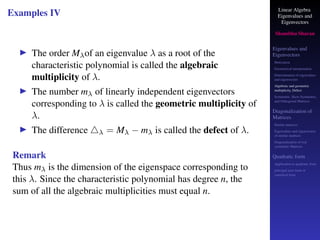
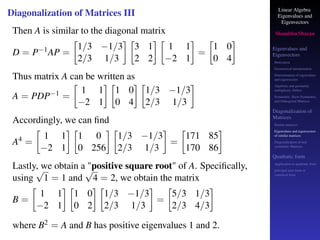
Diagonalization of Matrices IV
Now, consider the matrix A =
5 −1
1 3
We observe that λ = 4 is the only eigenvalue of A. The
corresponding eigenvector is x = [1 1]T. Accordingly, A is not
diagonalizable, since there does not exist a basis consisting of
eigenvectors of A.](https://image.slidesharecdn.com/pptonug-pglevel-240925153808-cd410ada/85/PPT-on-Eigen-values-and-Eigen-vectors-pdf-35-320.jpg)
![Linear Algebra
Eigenvalues and
Eigenvectors
Shambhu Sharan
Eigenvalues and
Eigenvectors
Motivation
Geometrical interpretation
Determination of eigenvalues
and eigenvectors
Algebraic and geometric
multiplicity, Defect
Symmetric, Skew-Symmetric,
and Orthogonal Matrices
Diagonalization of
Matrices
Similar matrices
Eigenvalues and eigenvectors
of similar matrices
Diagonalization of real
symmetric Matrices
Quadratic form
Application to quadratic form
principal axes form or
canonical form
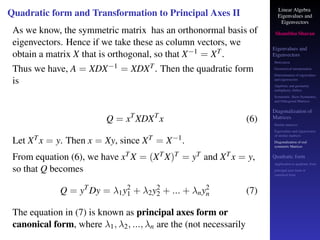
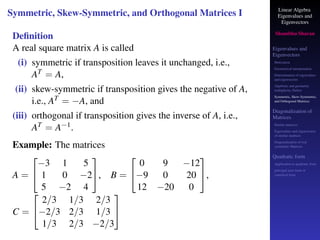
Quadratic form and Transformation to Principal Axes I
A quadratic form Q in the components x1, x2, ..., xn of a vector
x is a sum of n2 terms, i.e.,
Q = xTAX =
Pn
i=1
Pn
j=1 aijxixj =
a11x2
1 + a12x1x2 + ..... + a1nx1xn
a21x2x1 + a22x2
2 + ..... + a2nx2xn
................................................
an1xnx1 + an2xnx2 + ..... + annx2
n
A = [aij] is the coefficient matrix form. We may assume that A
is symmetric, because we can take off-diagonal terms together
in pairs and write the result as a sum of two equal terms.
Remark](https://image.slidesharecdn.com/pptonug-pglevel-240925153808-cd410ada/85/PPT-on-Eigen-values-and-Eigen-vectors-pdf-37-320.jpg)