Downloaded 103 times












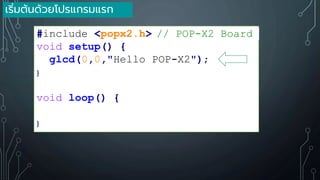


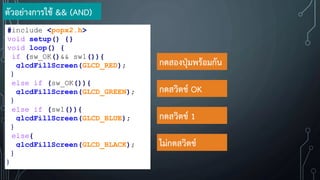
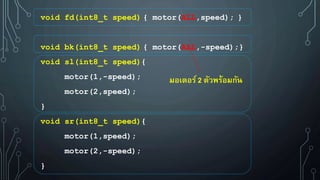
![setTextColor(COLOR)
GLCD_RED, color[0]
GLCD_GREEN, color[1]
GLCD_BLUE, color[2]
GLCD_YELLOW, color[3]
GLCD_BLACK, color[4]
GLCD_WHITE, color[5]
GLCD_CYAN, color[6]
GLCD_MAGENTA color[7]
GLCD_ORANGE color[8]
GLCD_LIME color[9]
GLCD_VIOLET color[10]
GLCD_PINK color[11]
GLCD_DOLLAR color[12]
GLCD_SKY color[13]
GLCD_BROWN color[14]
GLCD_DARKGREEN color[15]
GLCD_NAVY color[16]
GLCD_GRAY color[17]
GLCD_DARKGRAY color[18]
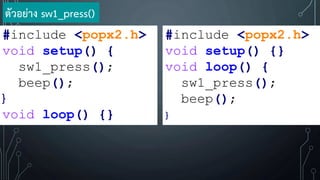
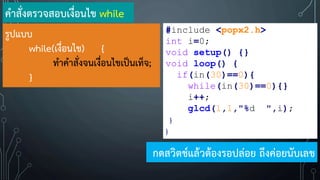
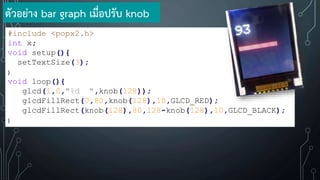
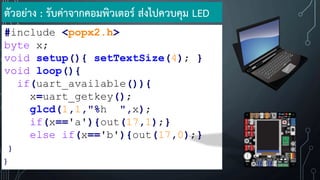
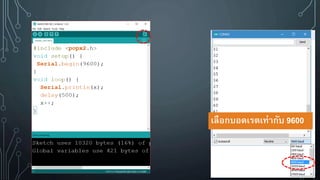
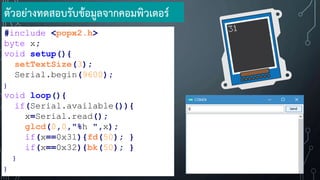
#include <popx2.h>
void setup(){
setTextColor(GLCD_RED);
glcd(0,0,"Hello");
setTextColor(GLCD_GREEN);
glcd(1,0,"World");
}
void loop(){}
colorRGB(R5,G6,B5)
colorRGB(31,63,31)
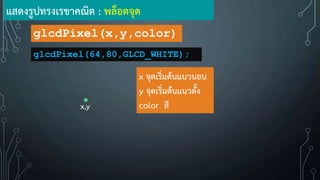
ค่าสีตัวอักษร setTextColor()
ค่าสีก้าหนดเอง](https://image.slidesharecdn.com/pop-x2educationkit-180712034538/85/POP-X2-Education-Kit-Presentation-32-320.jpg)

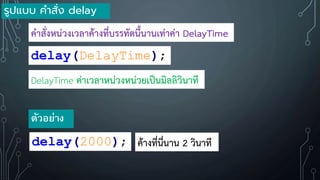
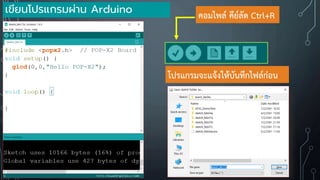
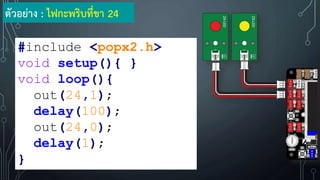
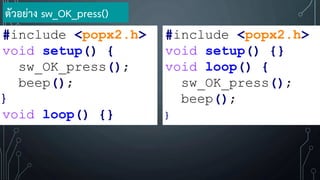
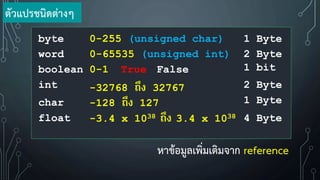
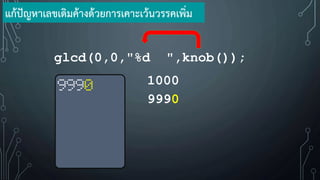
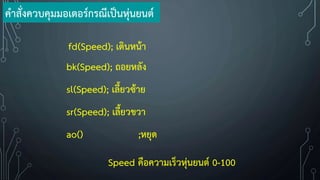
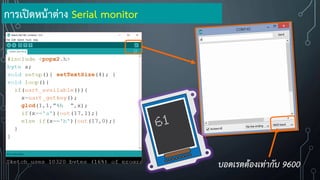
![glcdClear()
เคลียร์หน้าจอ
glcdFillScreen(COLOR)
เทสีลงบนหน้าจอทั้งหน้า
#include <popx2.h>
void setup(){}
void loop(){
glcdClear();
delay(500);
glcdFillScreen(color[0]);
delay(500);
glcdFillScreen(color[1]);
delay(500);
glcdFillScreen(color[2]);
delay(500);
}](https://image.slidesharecdn.com/pop-x2educationkit-180712034538/85/POP-X2-Education-Kit-Presentation-37-320.jpg)









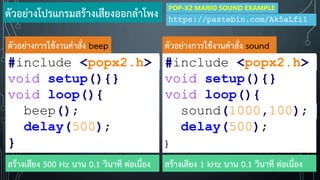
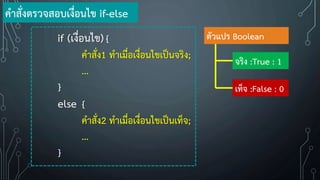
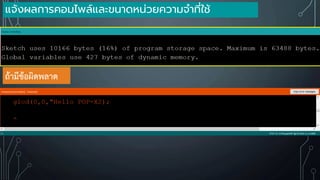
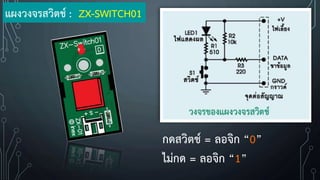
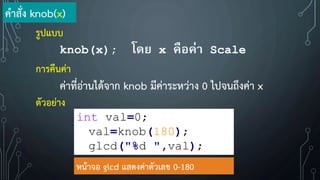
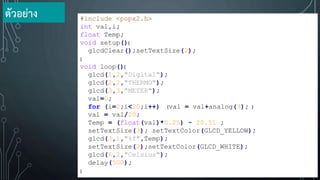
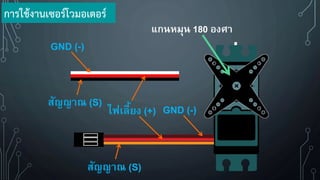
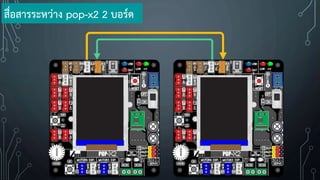
![for (ค่าเริ่มต้น; เงื่อนไข ;ส่วนเพิ่มค่า){
ท้าค้าสั่ง จนครบเงื่อนไข;
}
ค้าสั่งตรวจสอบเงื่อนไข for
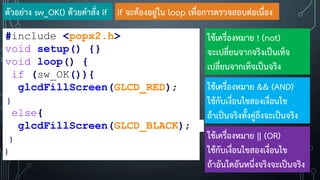
#include <popx2.h>
int i;
void setup() {
for(i=0;i<10;i++){
glcdFillScreen(color[i]);
delay(200);
}
}
void loop() {}
เปลี่ยนสีหน้าจอ 10 รอบ](https://image.slidesharecdn.com/pop-x2educationkit-180712034538/85/POP-X2-Education-Kit-Presentation-60-320.jpg)


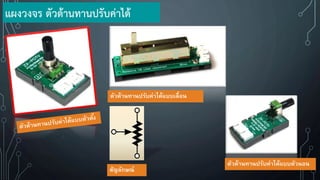

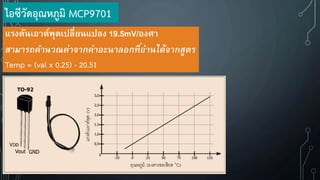





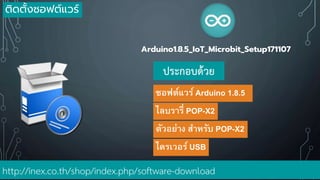
PowerPoint แนะนำการใช้งาน ชุดเรียนรู้ไมโครคอนโทรลเลอร์ เพื่อพัฒนาโครงงาน จากชุด https://inex.co.th/shop/pop-x2-education-kit.html ชุดเรียนรู้ไมโครคอนโทรลเลอร์ด้วยโปรแกรมภาษา C/C++ โดยใช้ซอฟต์แวร์ Arduino เรียนรู้เพื่อใช้งานไมโครคอนโทรลเลอร์สำหรับพัฒนาโครงงานวิทยาศาสตร์ประยุกต์สมัยใหม่ ที่บูรณาการองค์ความรู้รอบด้านทั้งซอฟต์แวร์และฮาร์ดแวร์ให้สอดคล้องกับสาระการเรียนรู้วิทยาศาสตร์สมัยใหม่ตามแนวคิด STEM ศึกษา (Science Technology Engineering Mathematic education) สำหรับนักเรียนในระดับมัธยมศึกษา รวมถึงบุคคลทั่วไปที่มีความสนใจศึกษาเพื่อใช้งานไมโครคอนโทรลเลอร์อย่างง่าย