Downloaded 58 times


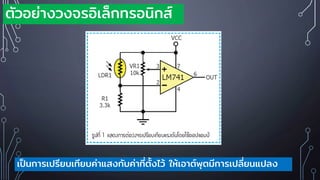
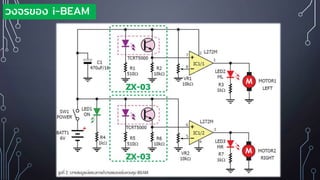

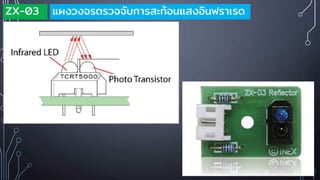










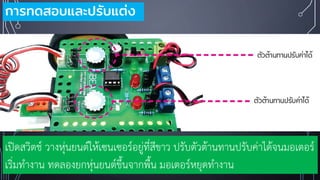








เรียนรู้่และสร้างหุ่นยนต์เคลื่อนที่ตามเส้นอย่างง่ายจากวงจรอิเล็กทรอนิกส์ด้วย BEAM Robot I-Beam iBEAM ซึ่งมีหัวใจหลักคือไอซีออปแอมป์เบอร์ L272M ซึ่งต่อเป็นวงจรเปรียบเทียบแรงดันหรือ Comparator ภายในไอซี 1 ตัวจะมีออปแอมป์อยู่ภายใน 2 ชุด แต่ละชุดสำหรับการควบคุมมอเตอร์ 1 ตัว ภาคอินพุตของออปแอมป์ขา non inverting (+) จะเชื่อมต่อกับเซนเซอร์ตรวจจับการสะท้อนเบอร์ TCRT5000 ส่วนฝั่งขา inverting (-) จะต่อกับตัวต้านทานปรับค่าได้เพื่อสร้างแรงดันเปรียบเทียบ เมืื่อขาของ non inverting (+) ได้รับแรงดันมากกว่าขา inverting (-) ขาเอาต์พุตของออปแอมป์จะมีแรงดันเป็นบวก ทำให้มอเตอร์ทำงาน แต่ถ้าขา inverting (-) ได้รับแรงดันมากกว่าขา non inverting (+) ขาเอาต์พุตของออปแอมป์จะมีแรงดันเป็น 0V มอเตอร์จะหยุดทำงาน ออปแอมป์ทั้งสองตัวทำงานเหมือนกันดังนั้น เมื่อนำ iBeam ไปตรวจสอบการเคลื่อนที่ตามเส้น เมื่อเซนเซอร์ตรวจจับการสะท้อนแสงพื้นผิวสีขาวหรือสีอ่อน ค่าแรงดันที่ได้จะมีค่ามากกว่าค่าอ้างอิงทำให้มอเตอร์ทำงาน และเมื่อตรวจเจอพื้นผิวสีเข้มหรือสีดำ การสะท้อนแสงจะมีน้อยลง มอเตอร์จึงหยุดทำงาน หน้าที่ของตัวต้านทาน VR1 และ VR2 จะทำหน้าที่ปรับเทียบค่าอ้างอิง เพื่อให้เซนเซอร์สามารถแยกแยะพื้นและเส้นทางเดินของหุ่นยนต์ได้