Downloaded 124 times


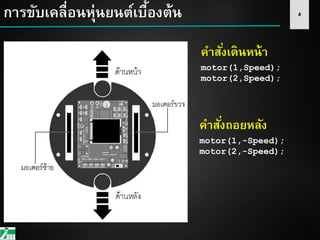
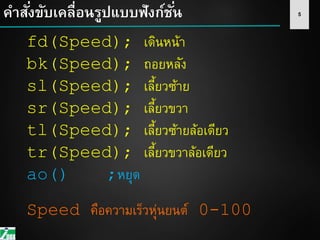
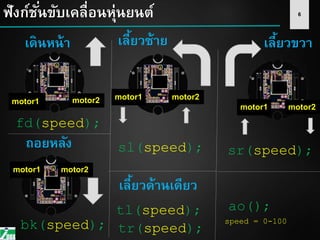
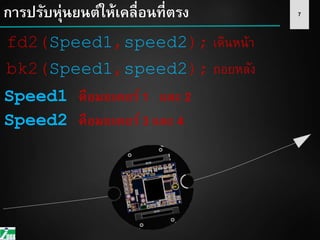
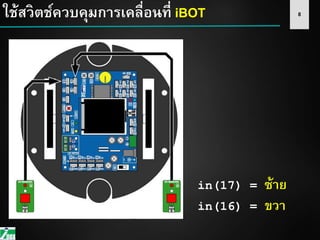
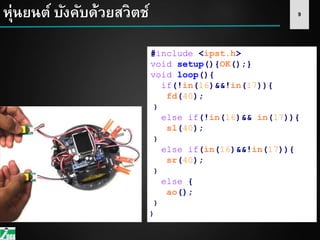


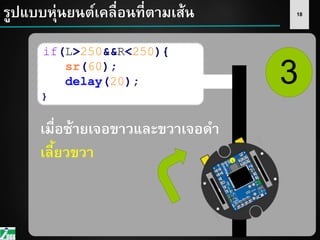
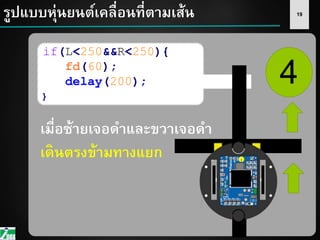
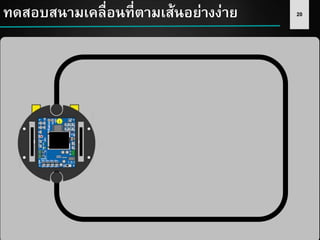



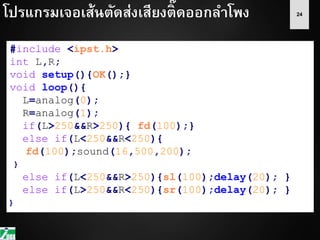

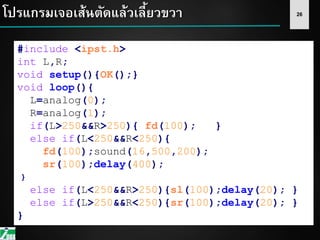

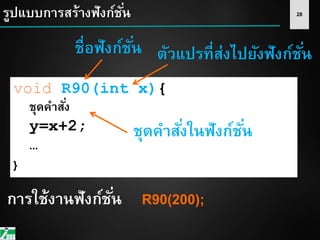
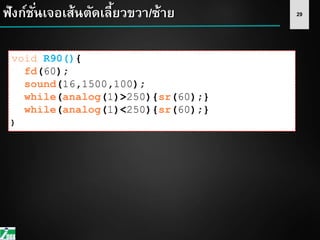
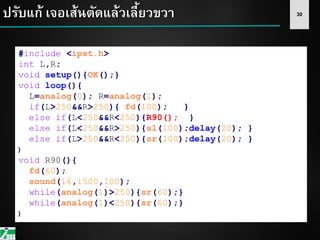














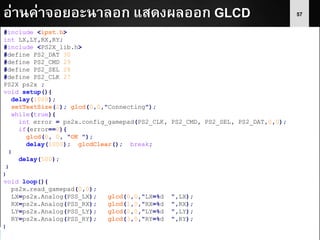
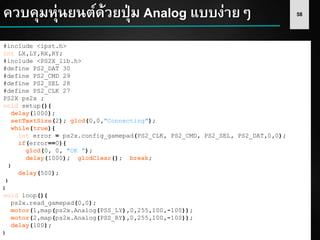



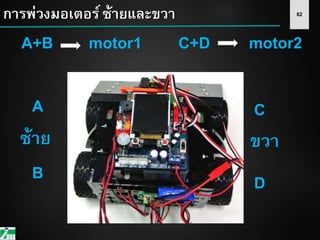
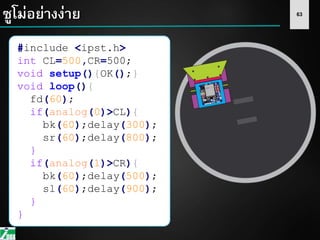













PowerPoint แนะนำการใช้หุ่นยนต์ i-BOT หุ่นยนต์ที่สร้างจากบอร์ด IPST-SE เขียนโปรแกรมด้วยภาษา C/C++ ด้วยโปรแกรม Arduino มาพร้อมกับไลบรารี่ที่ออกแบบมาเฉพาะกับหุ่นยนต์ ด้วยคำสั่งอ่านค่าเซนเซอร์และการขับเคลื่อนหุ่นยนต์ เนื้อหาแนะนำการเขียนโปรแกรมเพื่อให้หุ่นยนต์ทำงานอัตโนมัติ