#BITwww.inex.co.t
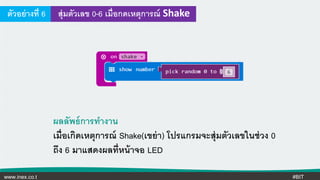
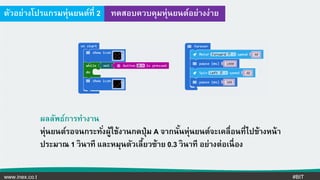
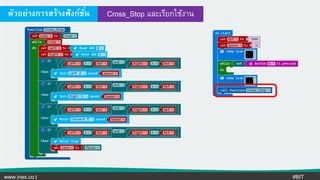
ตัวอย่างที่ 7 ตรวจสอบเงื่อนไขเปรียบเทียบif-else
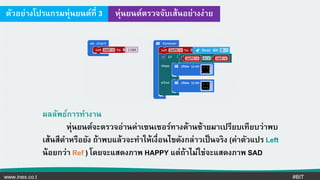
ผลลัพธ์กำรทำงำน
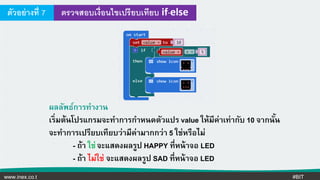
เริ่มต้นโปรแกรมจะทำกำรกำหนดตัวแปร value ให้มีค่ำเท่ำกับ 10 จำกนั้น
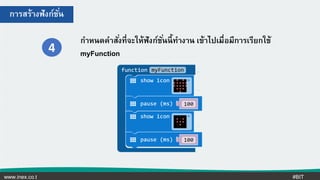
จะทำกำรเปรียบเทียบว่ำมีค่ำมำกกว่ำ 5 ใช่หรือไม่
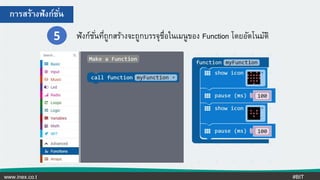
- ถ้ำ ใช่จะแสดงผลรูป HAPPY ที่หน้ำจอ LED
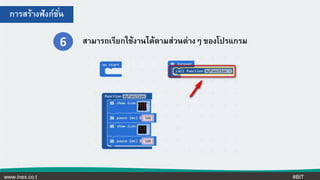
- ถ้ำ ไม่ใช่ จะแสดงผลรูป SAD ที่หน้ำจอ LED
34.
#BITwww.inex.co.t
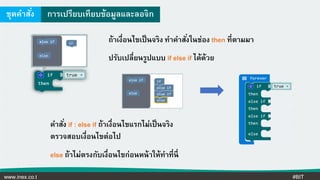
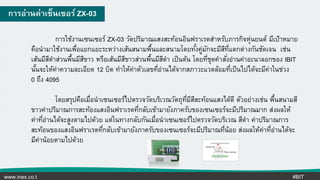
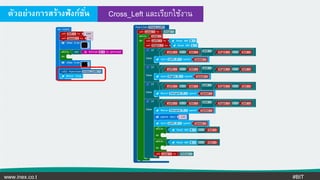
ตัวอย่ำงที่ 8 เพิ่มลด ค่ำด้วยเงื่อนไข if
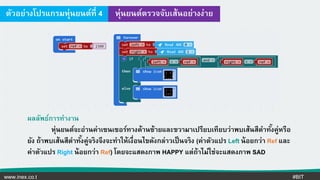
ผลลัพธ์กำรทำงำน
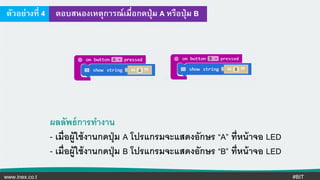
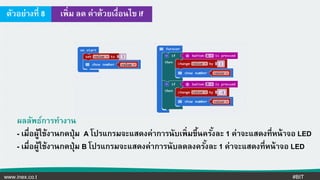
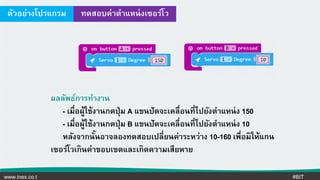
- เมื่อผู้ใช้งำนกดปุ่ม A โปรแกรมจะแสดงค่ำกำรนับเพิ่มขึ้นครั้งละ 1 ค่ำจะแสดงที่หน้ำจอ LED
- เมื่อผู้ใช้งำนกดปุ่ม B โปรแกรมจะแสดงค่ำกำรนับลดลงครั้งละ 1 ค่ำจะแสดงที่หน้ำจอ LED
#BITwww.inex.co.t
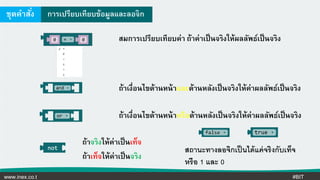
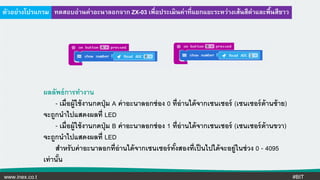
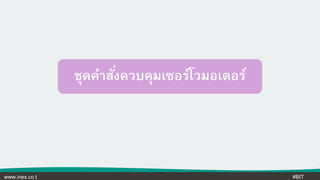
ตัวอย่ำงที่ 9 ลูปกำรนับค่ำจำก0 ถึง 5 ด้วยชุดคำสั่ง for
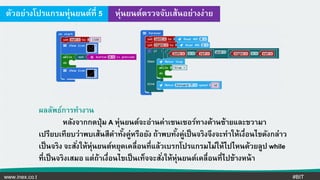
ผลลัพธ์กำรทำงำน
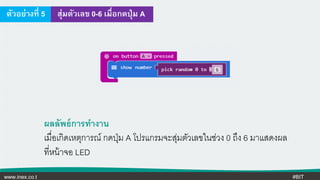
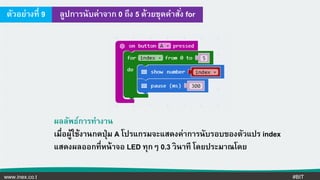
เมื่อผู้ใช้งำนกดปุ่ม A โปรแกรมจะแสดงค่ำกำรนับรอบของตัวแปร index
แสดงผลออกที่หน้ำจอ LED ทุกๆ 0.3 วินำที โดยประมำณโดย
#BITwww.inex.co.t
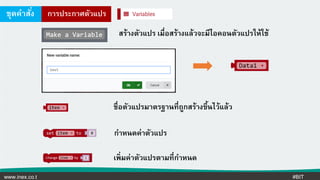
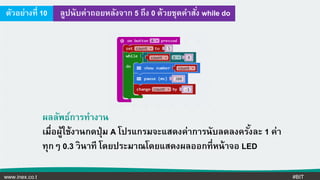
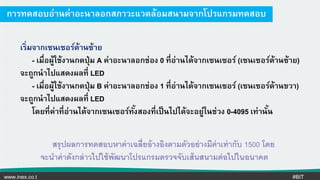
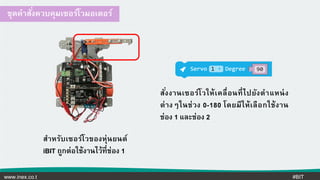
ตัวอย่ำงที่ 10 ลูปนับค่ำถอยหลังจำก5 ถึง 0 ด้วยชุดคำสั่ง while do
ผลลัพธ์กำรทำงำน
เมื่อผู้ใช้งำนกดปุ่ม A โปรแกรมจะแสดงค่ำกำรนับลดลงครั้งละ 1 ค่ำ
ทุกๆ 0.3 วินำที โดยประมำณโดยแสดงผลออกที่หน้ำจอ LED

































































![บทที่ 3 วิวัฒนาการของคอมพิวเตอร์และส่วนประกอบของคอมพิวเตอร์ [slide]](https://cdn.slidesharecdn.com/ss_thumbnails/3slide-110316115728-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)