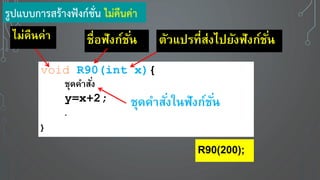
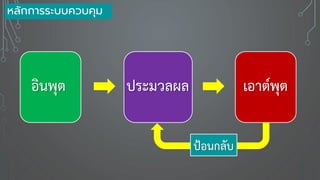
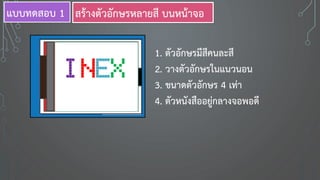
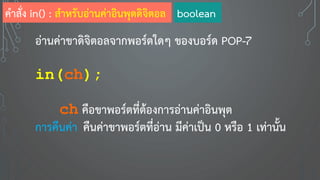
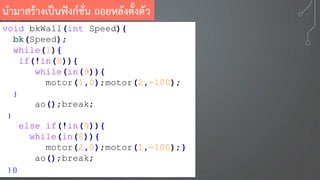
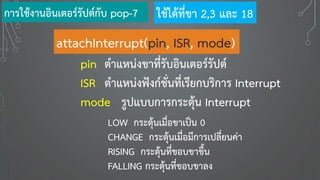
แสดงรูปทรงเรขาคณิต : วงกลม
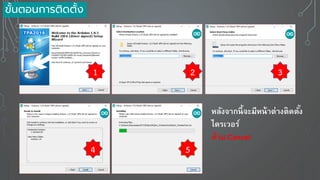
xตาแหน่งจุดศูนย์กลางวงกลมแนวนอน
y ตาแหน่งจุดศูนย์กลางวงกลมแนวตั้ง
radius รัศมีของวงกลม
color สี
glcdCircle(x,y,radius,color)
glcdFillCircle(x,y,radius,color)
x,y
radius
Fill
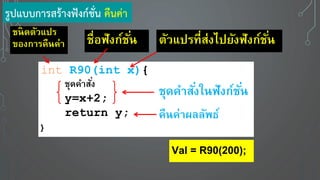
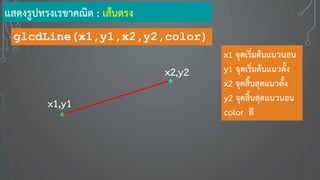
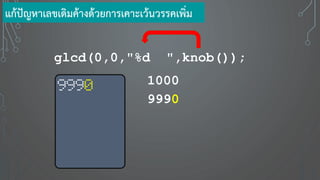
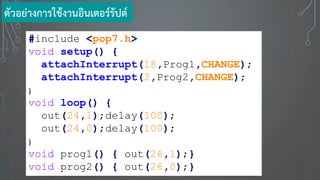
แสดงรูปทรงเรขาคณิต : เส้นโค้ง
xจุดเริ่มต้นแนวนอน
y จุดเริ่มต้นแนวตั้ง
r รัศมีเส้นโค้ง
startAngle มุมเริ่ม
endAngle มุมสิ้นสุด
color สี
x,y
glcdArc(x,y,r,startAngle,endAngle,color)
startAngle(0)
r
endAngle(90)
glcdArc(64,80,64,0,90,GLCD_RED);
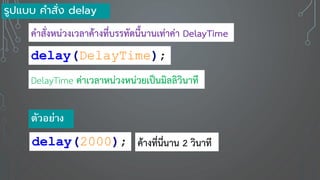
44.
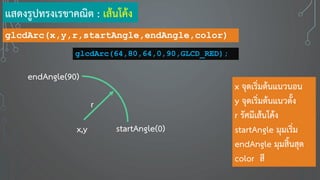
แสดงรูปทรงเรขาคณิต : พล็อตจุด
xจุดเริ่มต้นแนวนอน
y จุดเริ่มต้นแนวตั้ง
color สีx,y
glcdPixel(x,y,color)
glcdPixel(64,80,GLCD_WHITE);

















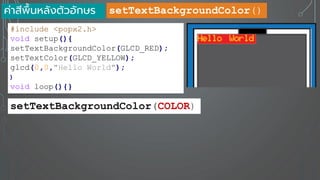
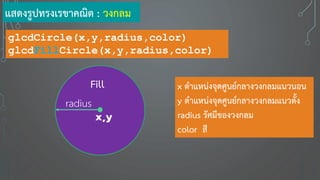
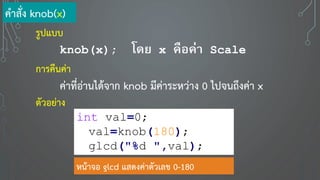
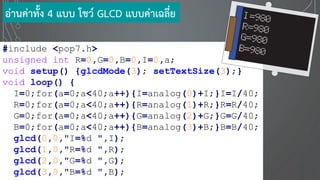
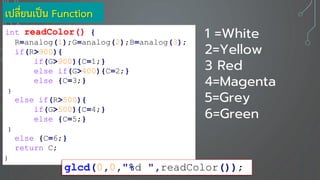
![setTextColor(COLOR)
GLCD_RED, color[0]
GLCD_GREEN, color[1]
GLCD_BLUE, color[2]
GLCD_YELLOW, color[3]
GLCD_BLACK, color[4]
GLCD_WHITE, color[5]
GLCD_CYAN, color[6]
GLCD_MAGENTA color[7]
GLCD_ORANGE color[8]
GLCD_LIME color[9]
GLCD_VIOLET color[10]
GLCD_PINK color[11]
GLCD_DOLLAR color[12]
GLCD_SKY color[13]
GLCD_BROWN color[14]
GLCD_DARKGREEN color[15]
GLCD_NAVY color[16]
GLCD_GRAY color[17]
GLCD_DARKGRAY color[18]
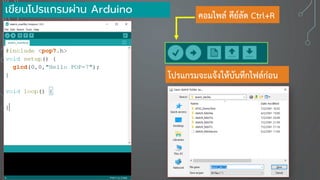
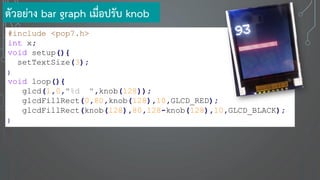
#include <popx2.h>
void setup(){
setTextColor(GLCD_RED);
glcd(0,0,"Hello");
setTextColor(GLCD_GREEN);
glcd(1,0,"World");
}
void loop(){}
colorRGB(R5,G6,B5)
colorRGB(31,63,31)
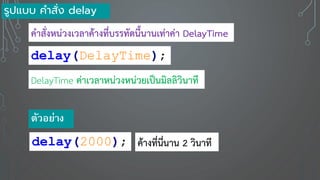
ค่าสีตัวอักษร setTextColor()
ค่าสีกาหนดเอง](https://image.slidesharecdn.com/pop-7-180722015745/85/POP-7-Robot-with-RQ-7-Platform-PDF-33-320.jpg)

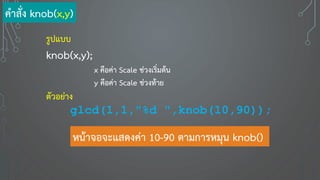
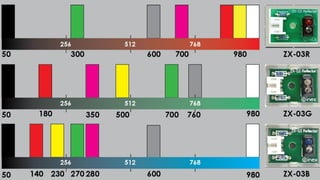
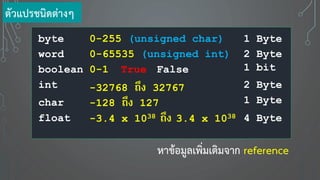
![glcdClear()
เคลียร์หน้าจอ
glcdFillScreen(COLOR)
เทสีลงบนหน้าจอทั้งหน้า
#include <popx2.h>
void setup(){}
void loop(){
glcdClear();
delay(500);
glcdFillScreen(color[0]);
delay(500);
glcdFillScreen(color[1]);
delay(500);
glcdFillScreen(color[2]);
delay(500);
}](https://image.slidesharecdn.com/pop-7-180722015745/85/POP-7-Robot-with-RQ-7-Platform-PDF-38-320.jpg)








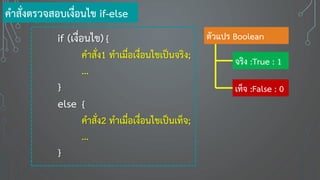










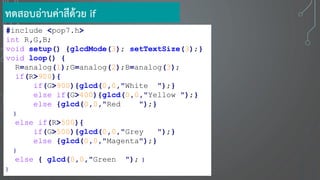



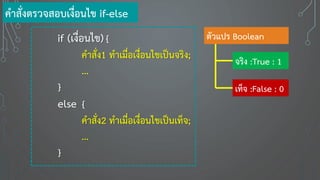
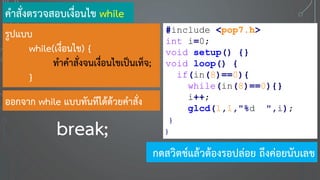
![for (ค่าเริ่มต้น; เงื่อนไข ;ส่วนเพิ่มค่า){
ทาคาสั่ง จนครบเงื่อนไข;
}
คาสั่งตรวจสอบเงื่อนไข for
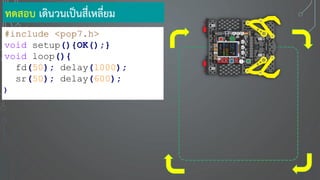
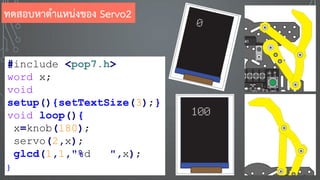
#include <pop7.h>
int i;
void setup() {
for(i=0;i<10;i++){
glcdFillScreen(color[i]);
delay(200);
}
}
void loop() {}
เปลี่ยนสีหน้าจอ 10 รอบ](https://image.slidesharecdn.com/pop-7-180722015745/85/POP-7-Robot-with-RQ-7-Platform-PDF-132-320.jpg)