Downloaded 166 times
![Common
Facilities
virtual
memory
framework
block
device
switch
exec
switch
a.out
file mappings
disk driver
tape driver
network
driver
tty
driver
FFS
RFS
system
processes
s5fs
time-sharing
processes
NFS
device
mappings
anonymous
mappings
coff
elf
STREAMS
vnode/vfs
interface
scheduler
framework
Figure 2.17 Modern UNIX Kernel [VAHA96]](https://image.slidesharecdn.com/ch02-os8e-141107144919-conversion-gate01/75/Operating-System-Overview-71-2048.jpg)

The document provides an overview of operating systems, including: 1) An operating system controls application program execution and acts as an interface between applications and hardware. Main objectives are convenience, efficiency, and ability to evolve. 2) Early operating systems evolved from serial processing to simple batch systems to multiprogrammed batch systems and time-sharing systems to better manage resources and improve processor utilization. 3) Modern operating systems employ processes to structure programs in execution, manage memory and system resources, and provide security and scheduling functions. Processes allow concurrent multi-tasking and protection between programs.
Introduction to Operating Systems by William Stallings. Discusses OS overview.
Defines an OS as a program controlling application execution, acting as an interface. Objectives include convenience, efficiency, and evolution.
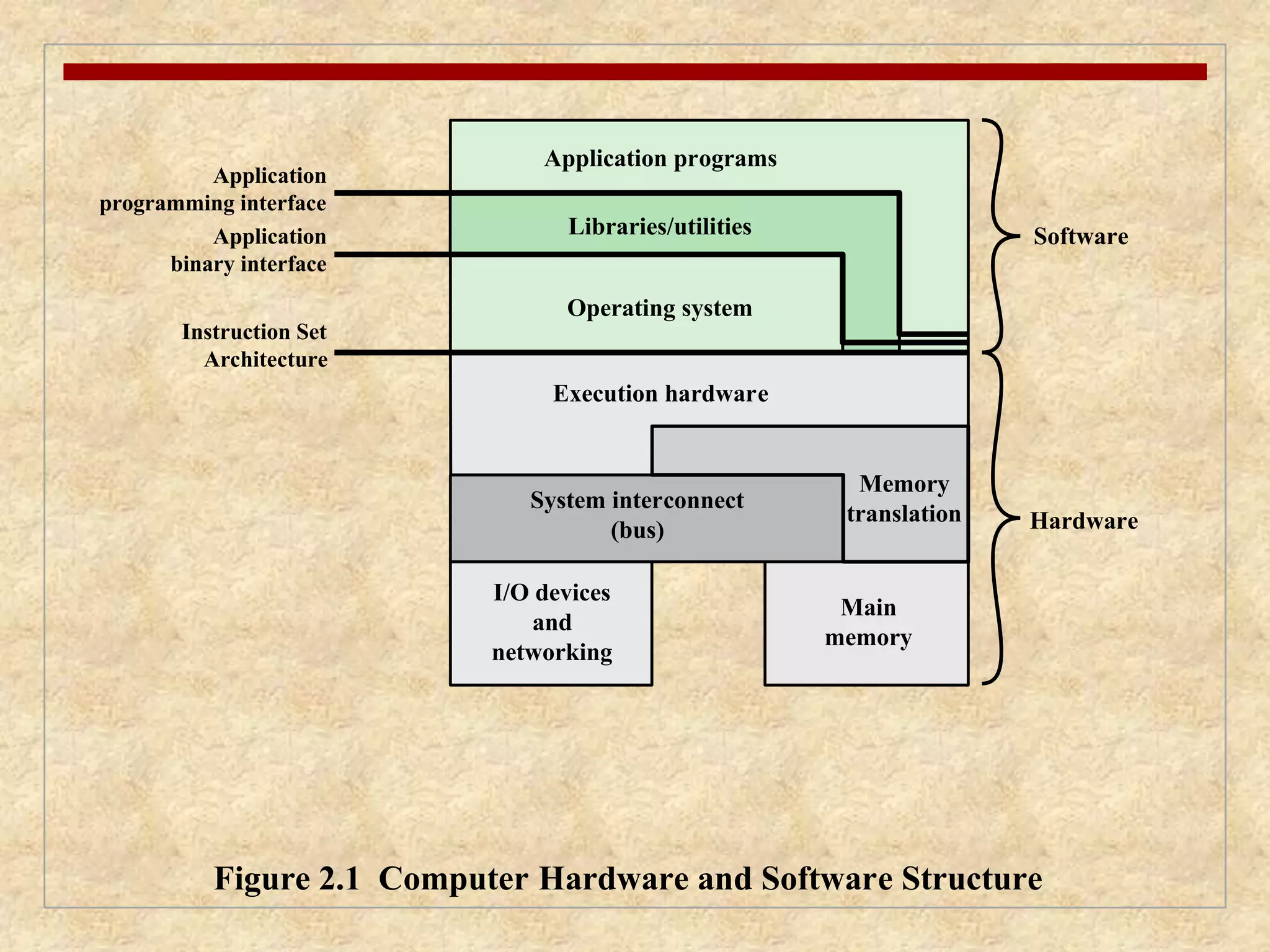
Illustrates a computer's hardware/software structure, highlighting OS, application programs, libraries, and I/O devices.
Lists OS services such as program development/execution, I/O access, error detection, and accounting.
Covers key interfaces relevant to OS: Instruction Set Architecture (ISA), Application Binary Interface (ABI), and Application Programming Interface (API).
Explains the OS role in managing computer resources for data movement, storage, and processing.
Discusses OS functioning like standard software, needing control from the processor.
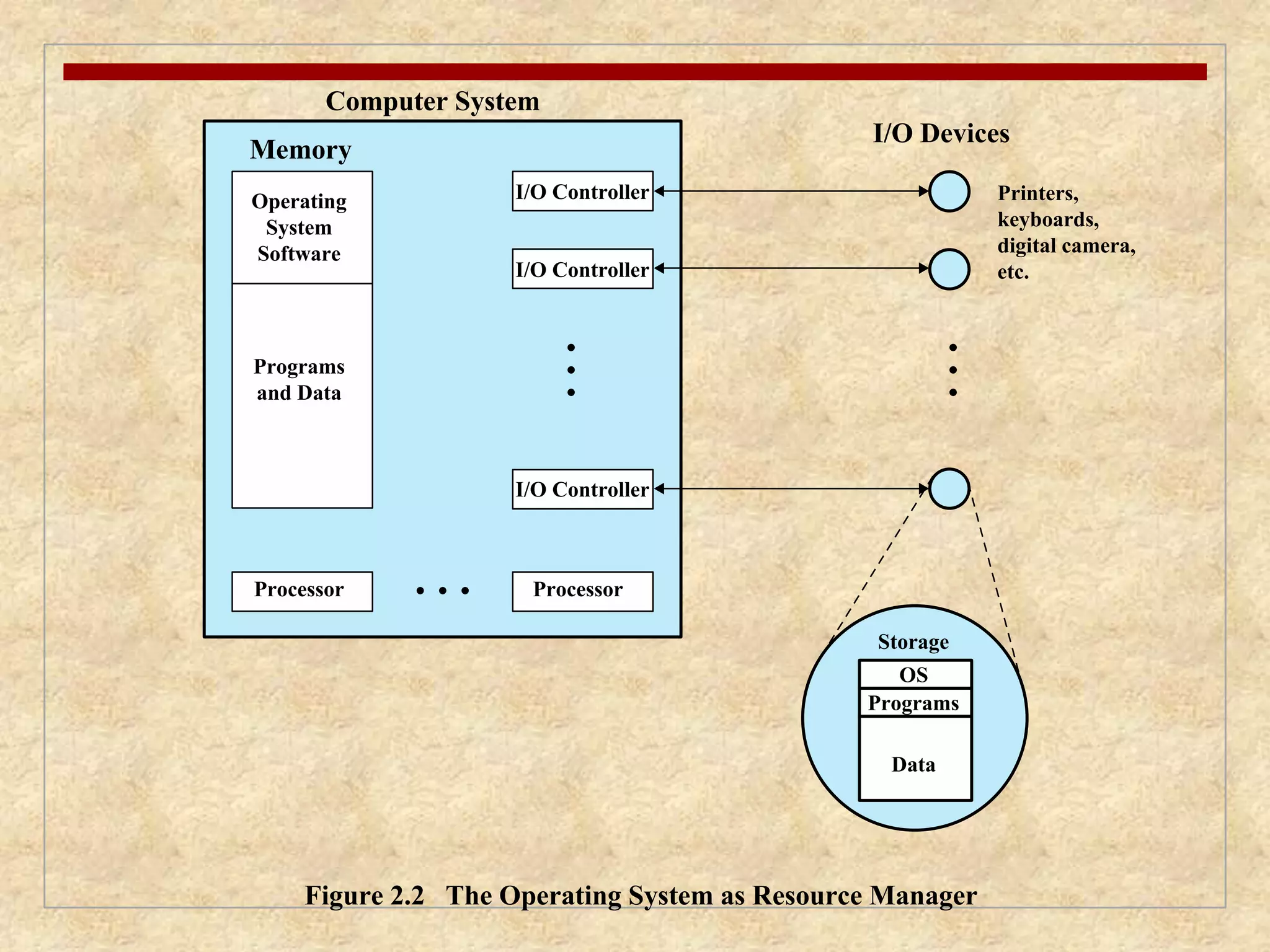
Visual representation of OS managing computer resources, including memory, I/O devices, and processing.
Discusses the evolution of OS due to hardware upgrades, new types of hardware, new services, and necessary fixes.
Describes stages of OS evolution: Serial Processing, Simple Batch Systems, Multiprogrammed Batch Systems, and Time Sharing.
Overview of earliest computers without an OS, highlighting user challenges and inefficiencies.
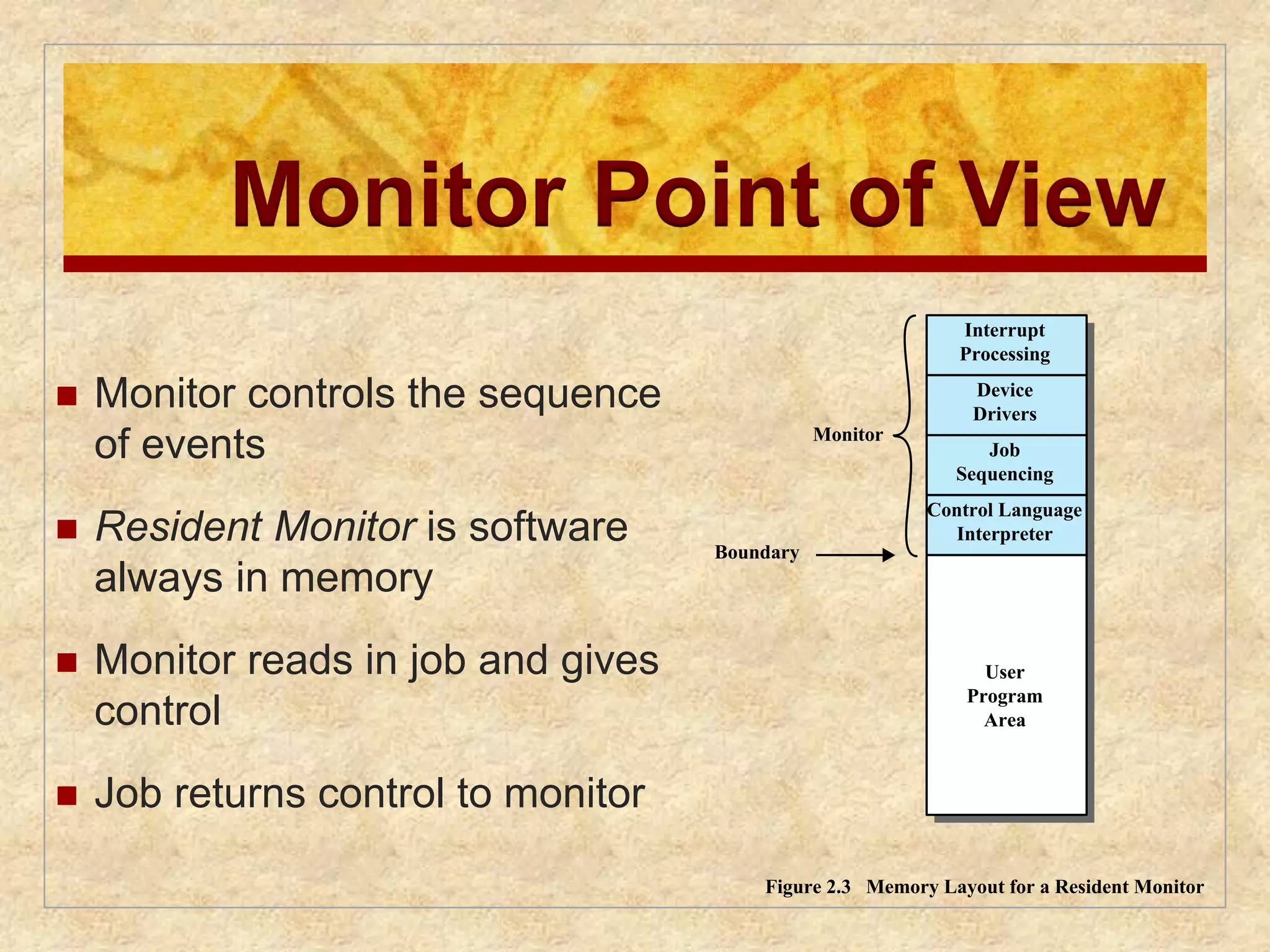
Introduces simple batch processing systems, focusing on maximizing processor utilization without direct user access.
Details monitor responsibilities in job sequencing and control in batch systems.
Explains how processors execute instructions from the monitor and user programs, emphasizing control flow.
Describes Job Control Language (JCL) for submitting job instructions to the monitor.
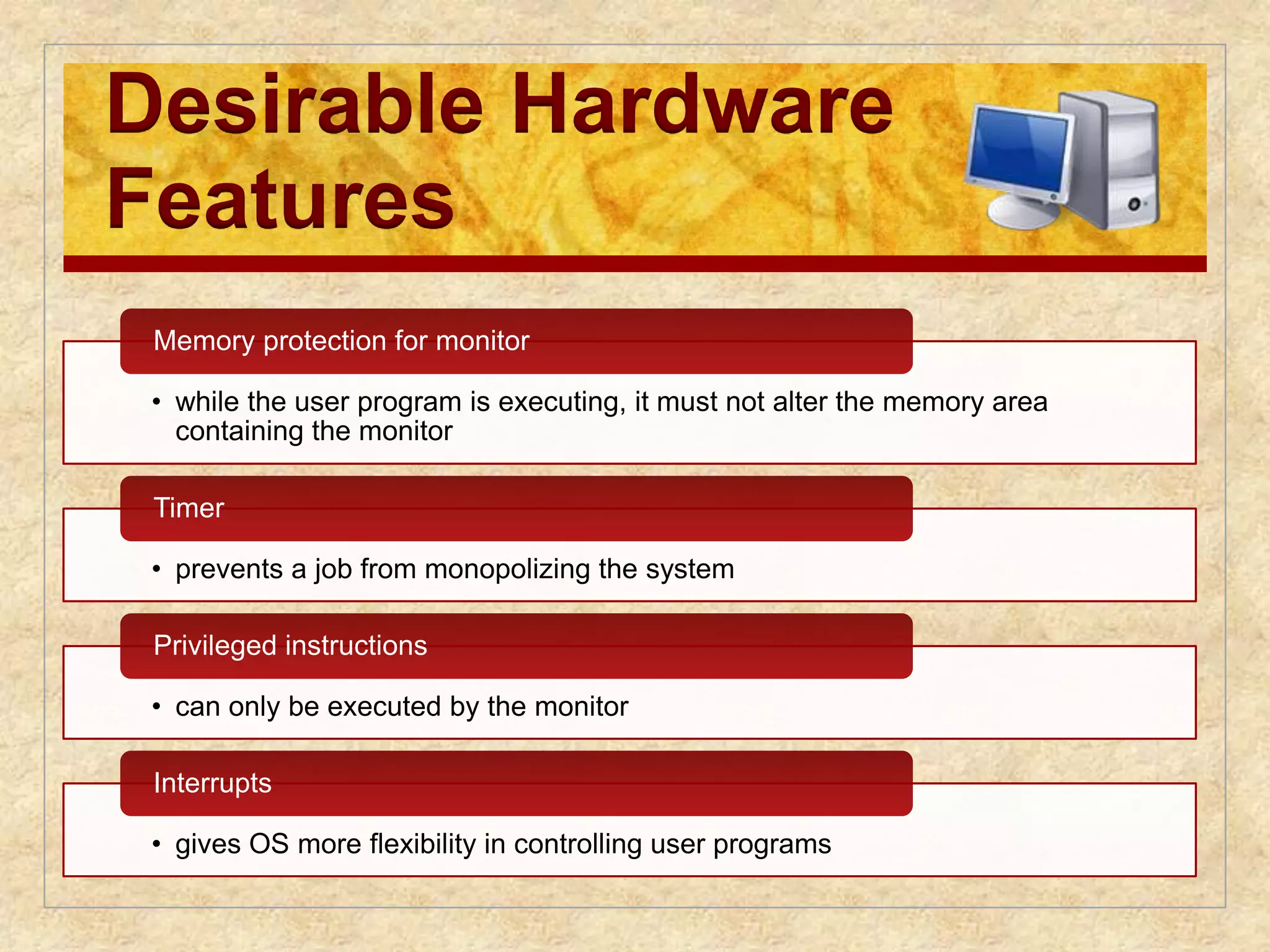
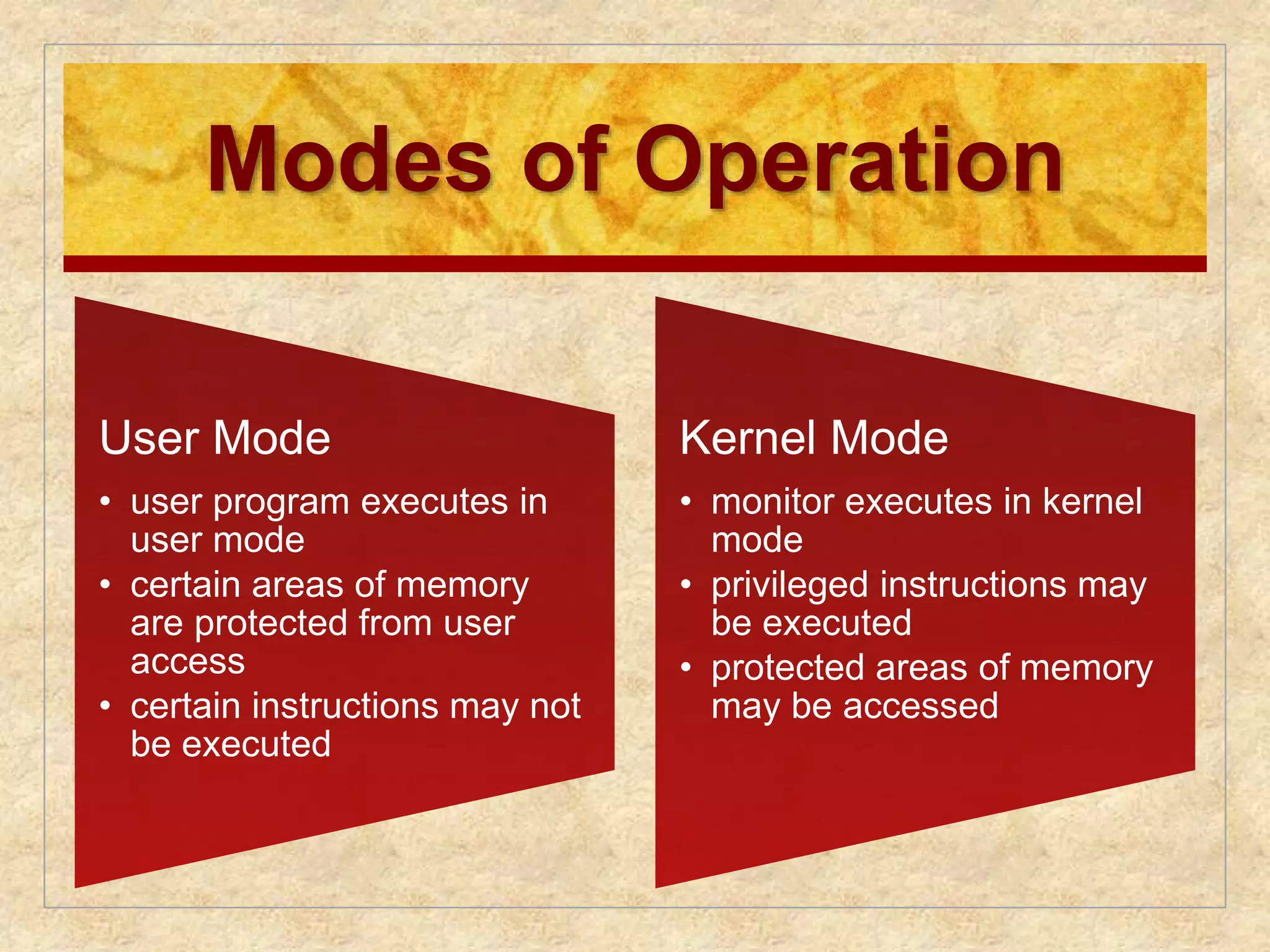
Lists key hardware features desirable for OS: memory protection, timer, privileged instructions, and interrupts.
Distinguishes between user mode and kernel mode in OS operations for resource protection and access.
Explains the overhead incurred in simple batch systems and their effect on processor utilization.
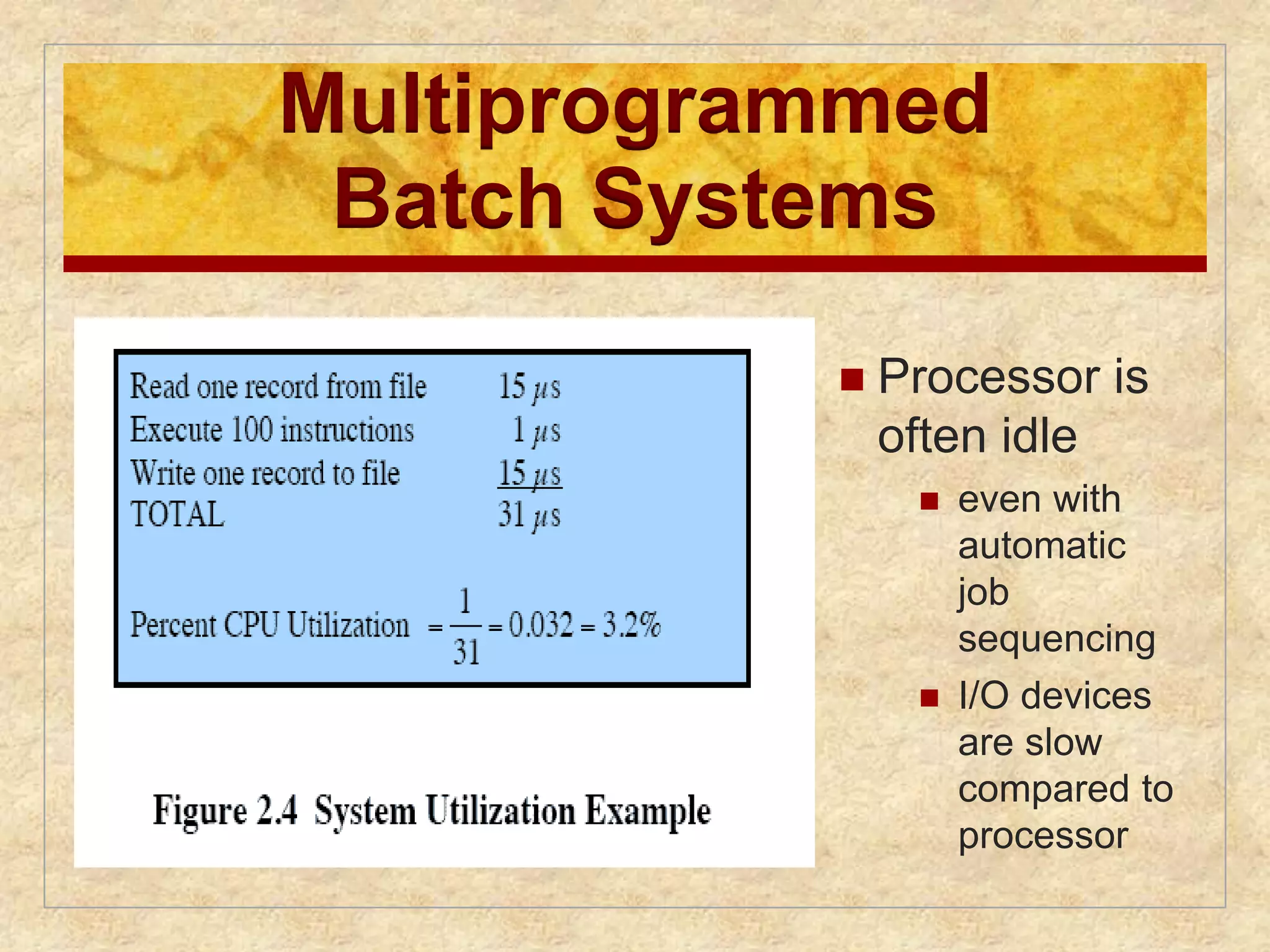
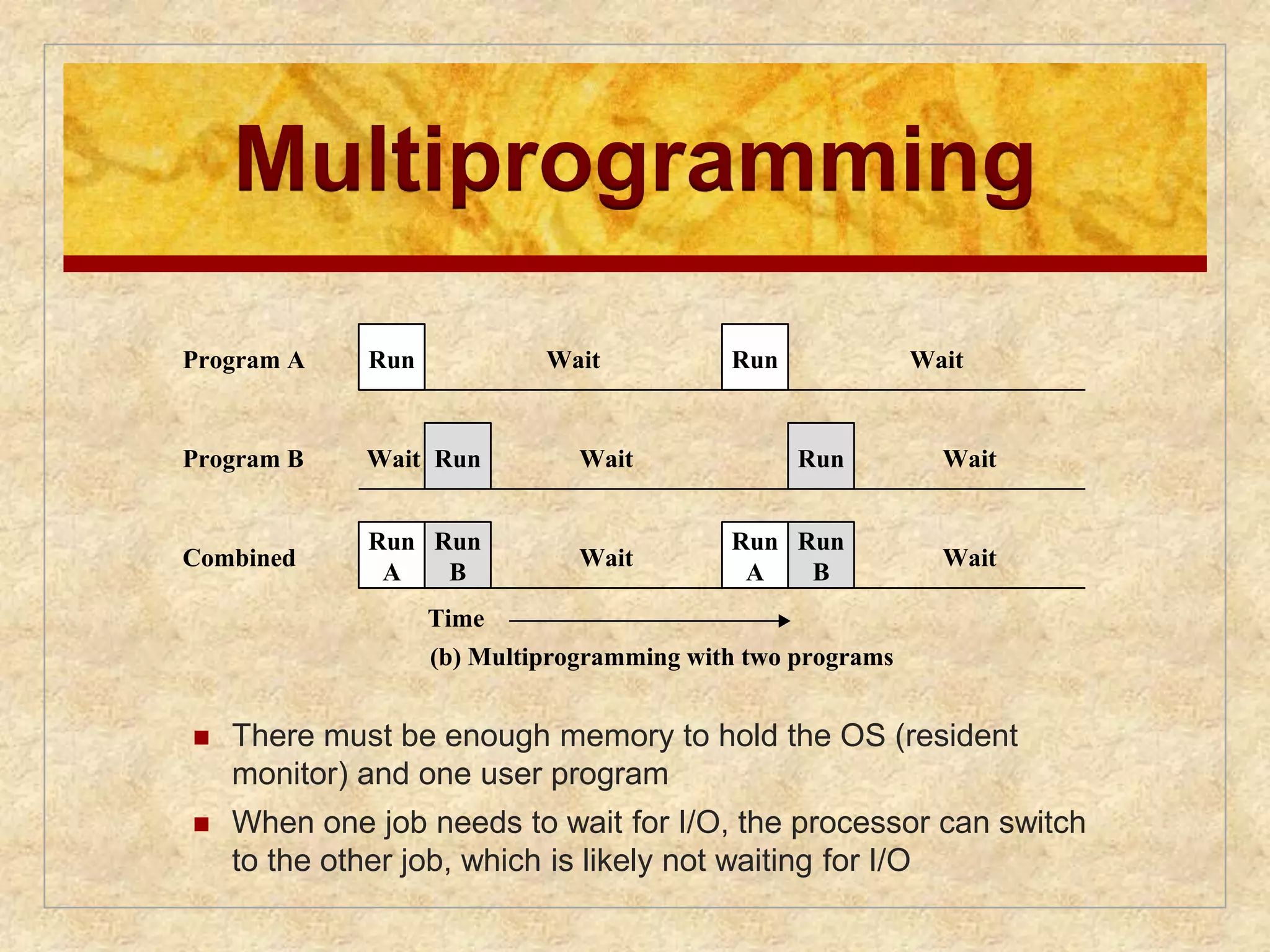
Discusses multiprogramming, the issue of idle processors due to slow I/O devices.
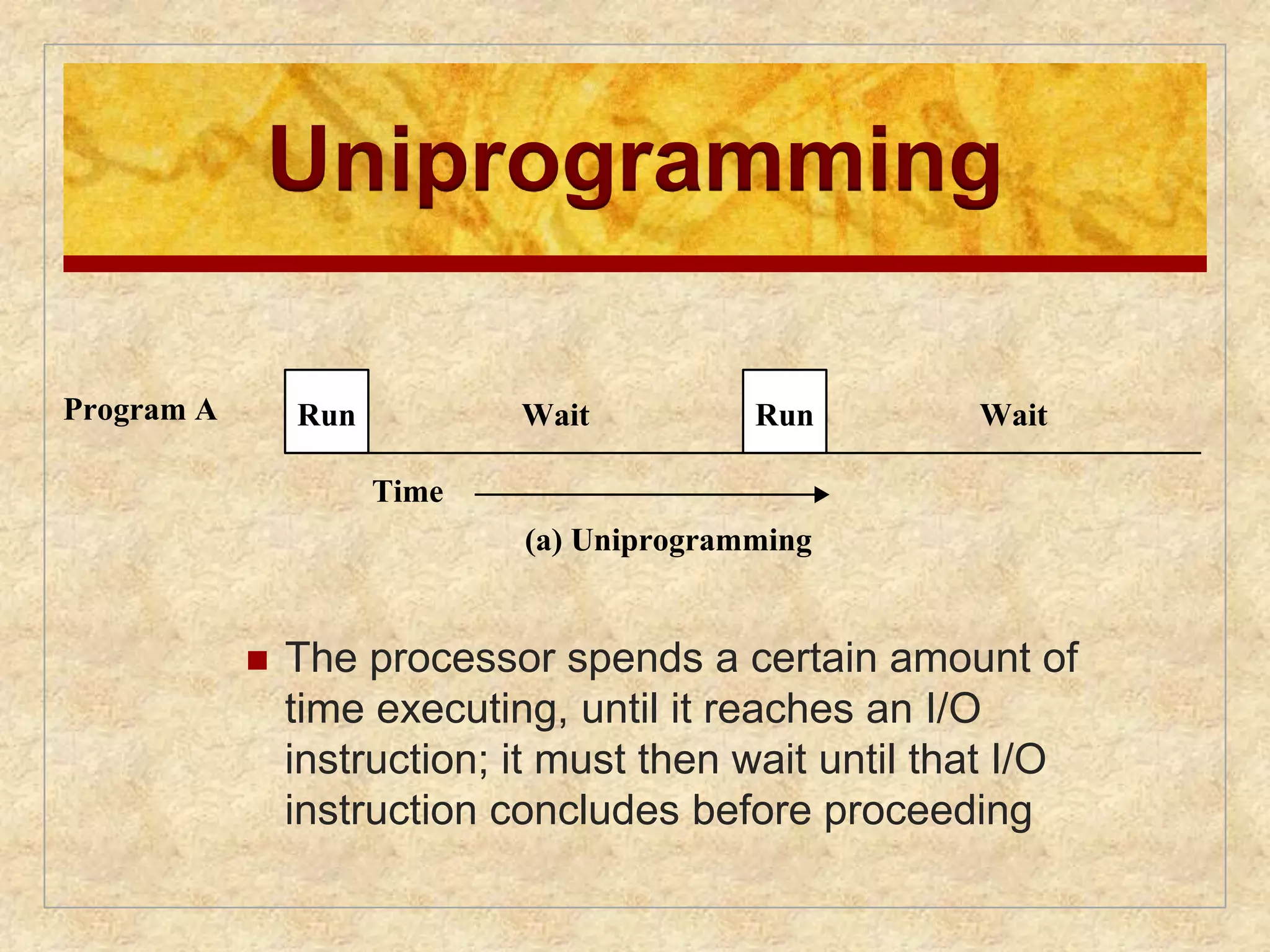
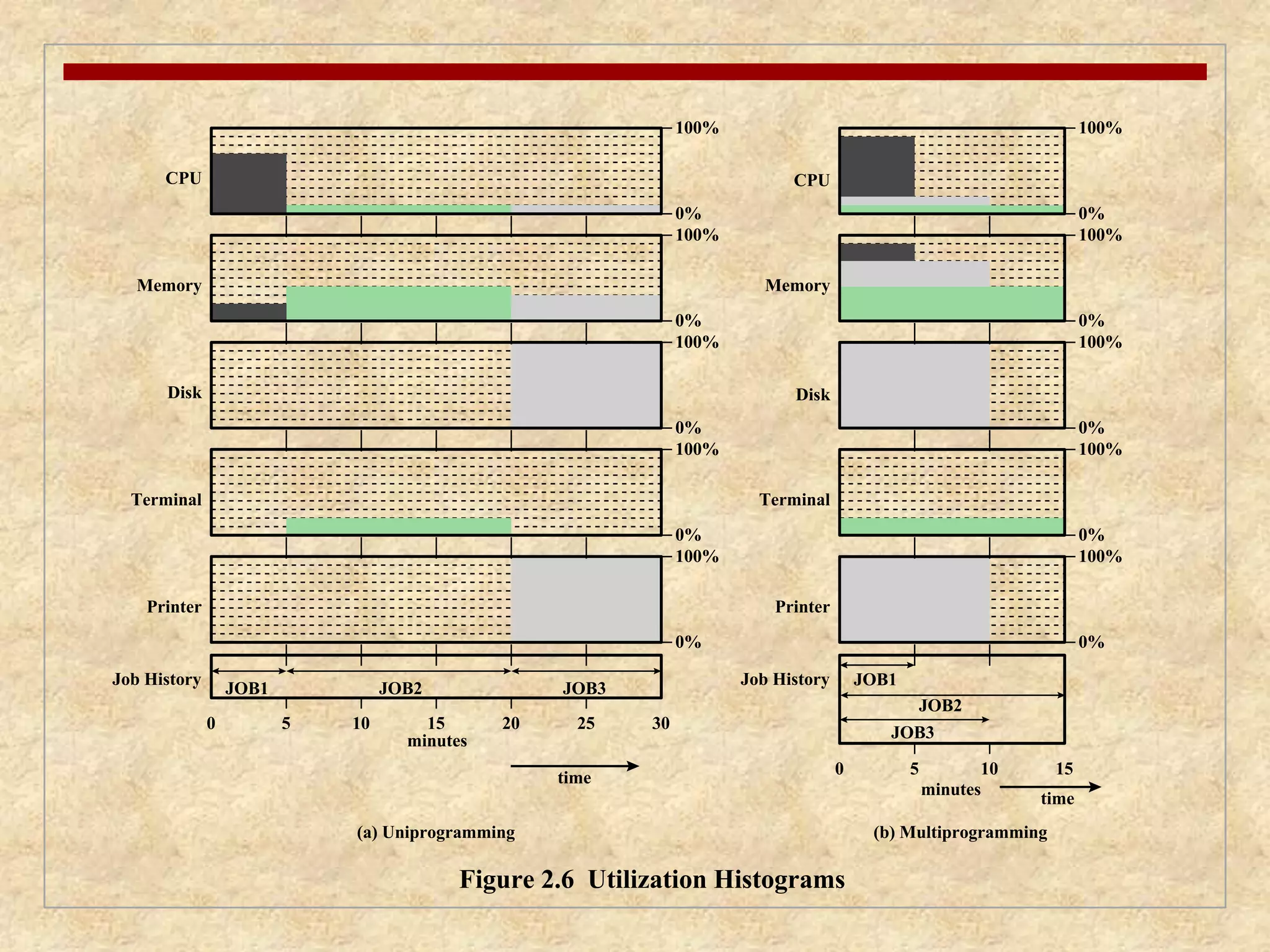
Illustrates the difference between uniprogramming and multiprogramming in terms of processor efficiency.
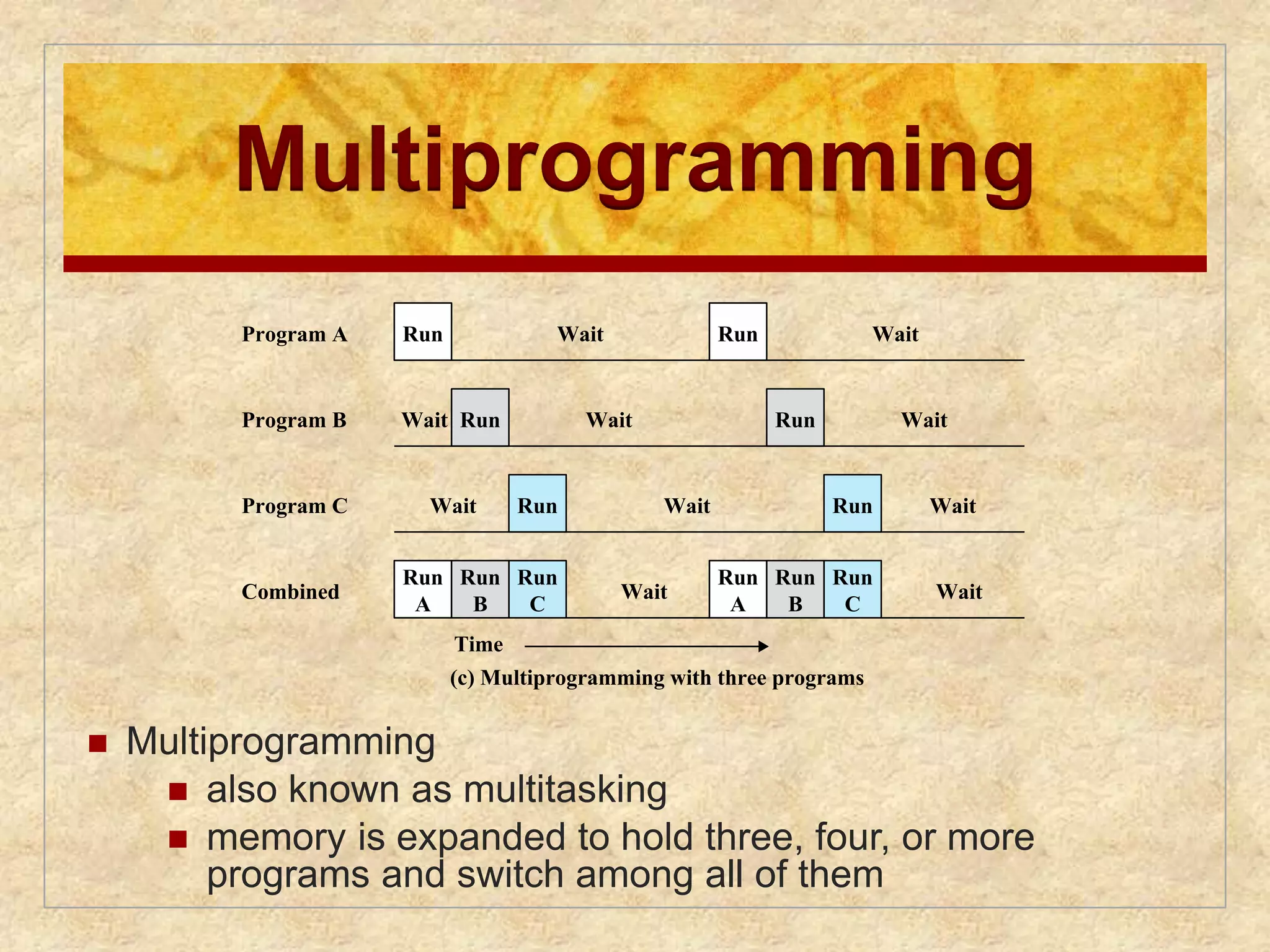
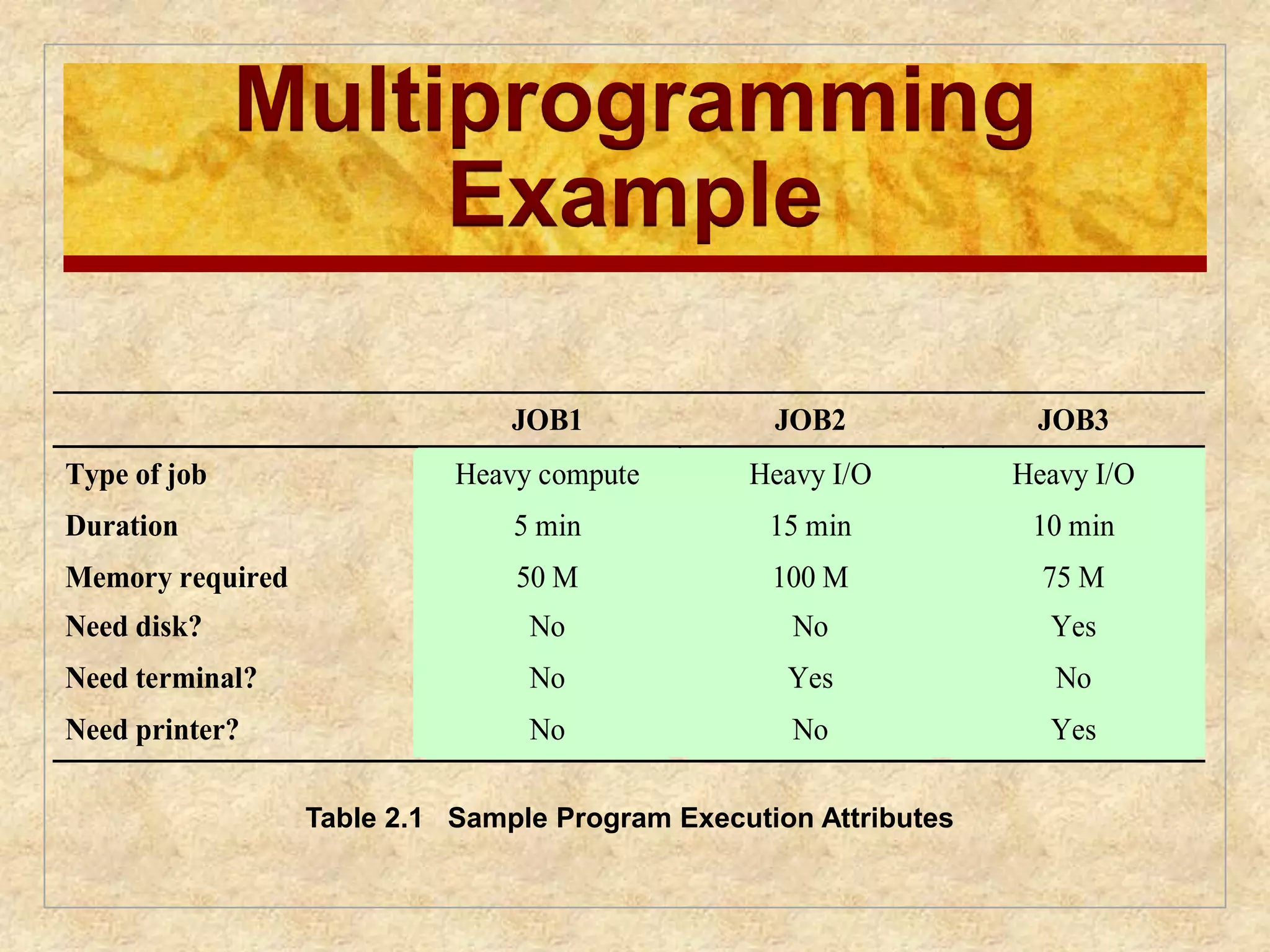
Shows multiprogramming in action with examples of multiple jobs running concurrently.
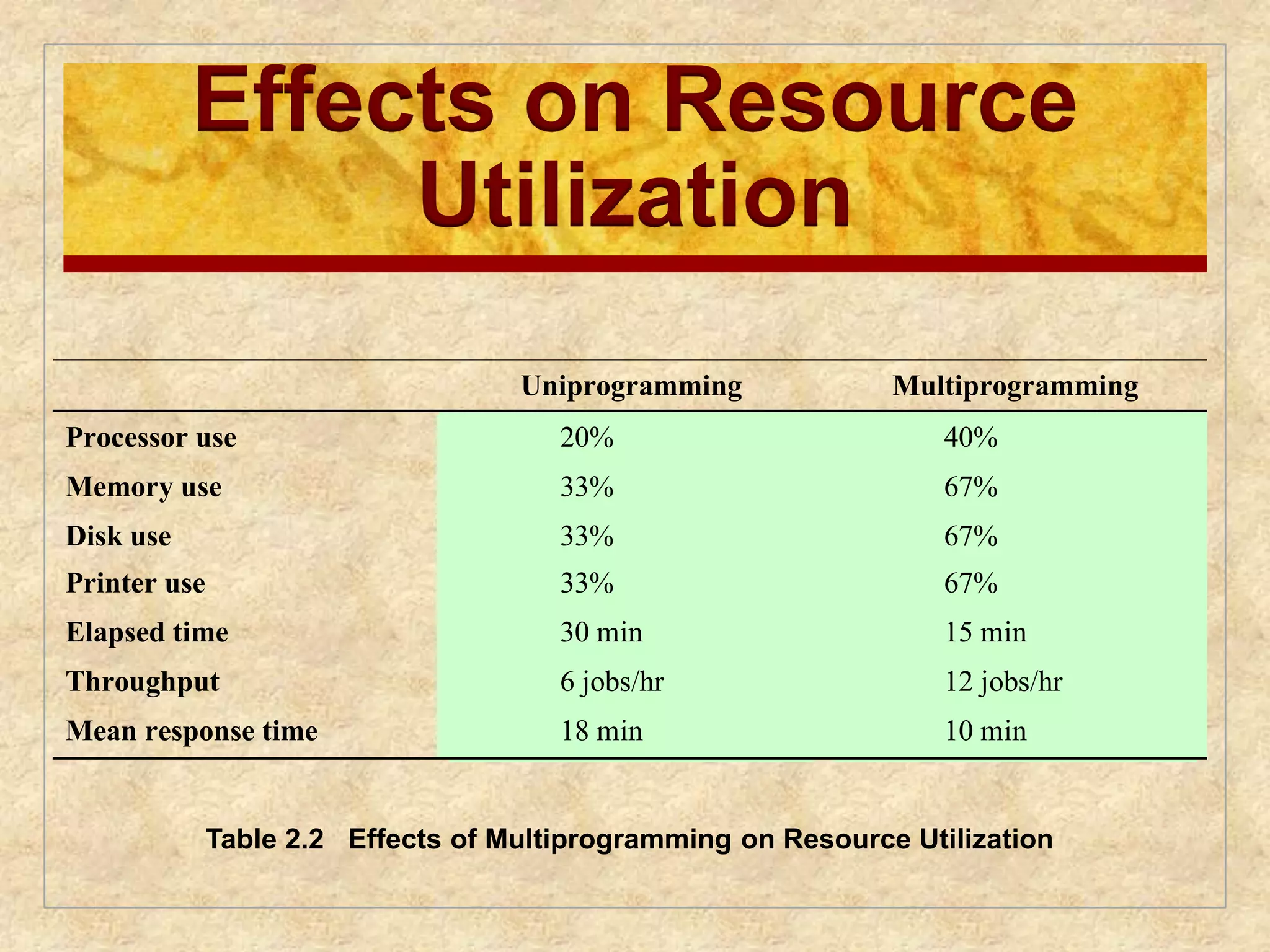
Compares resource utilization metrics between uniprogramming and multiprogramming methodologies.
Introduces time-sharing systems allowing multiple users to interact concurrently with the OS.
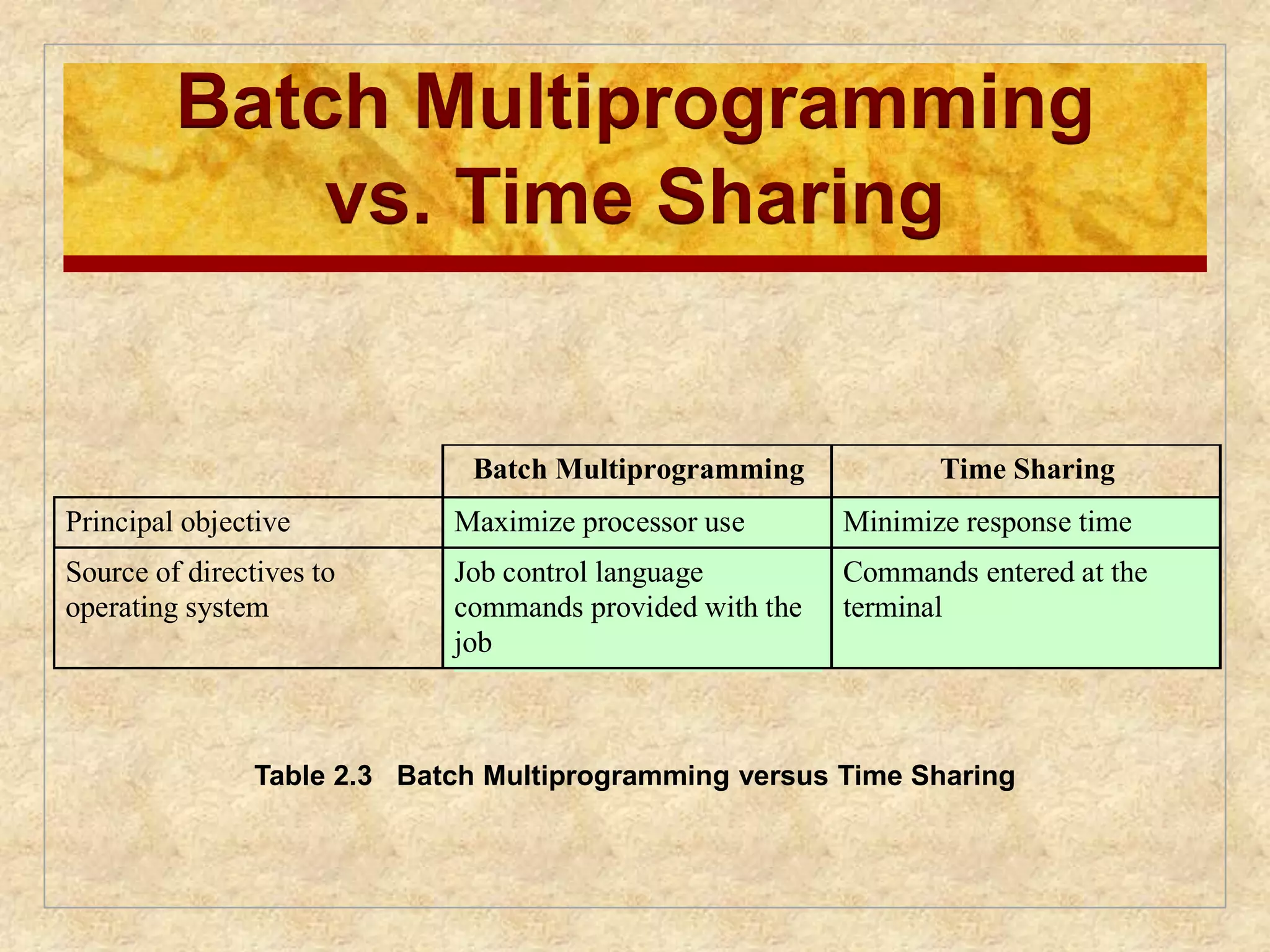
Contrasts batch multiprogramming with time-sharing systems in terms of objectives and interaction type.
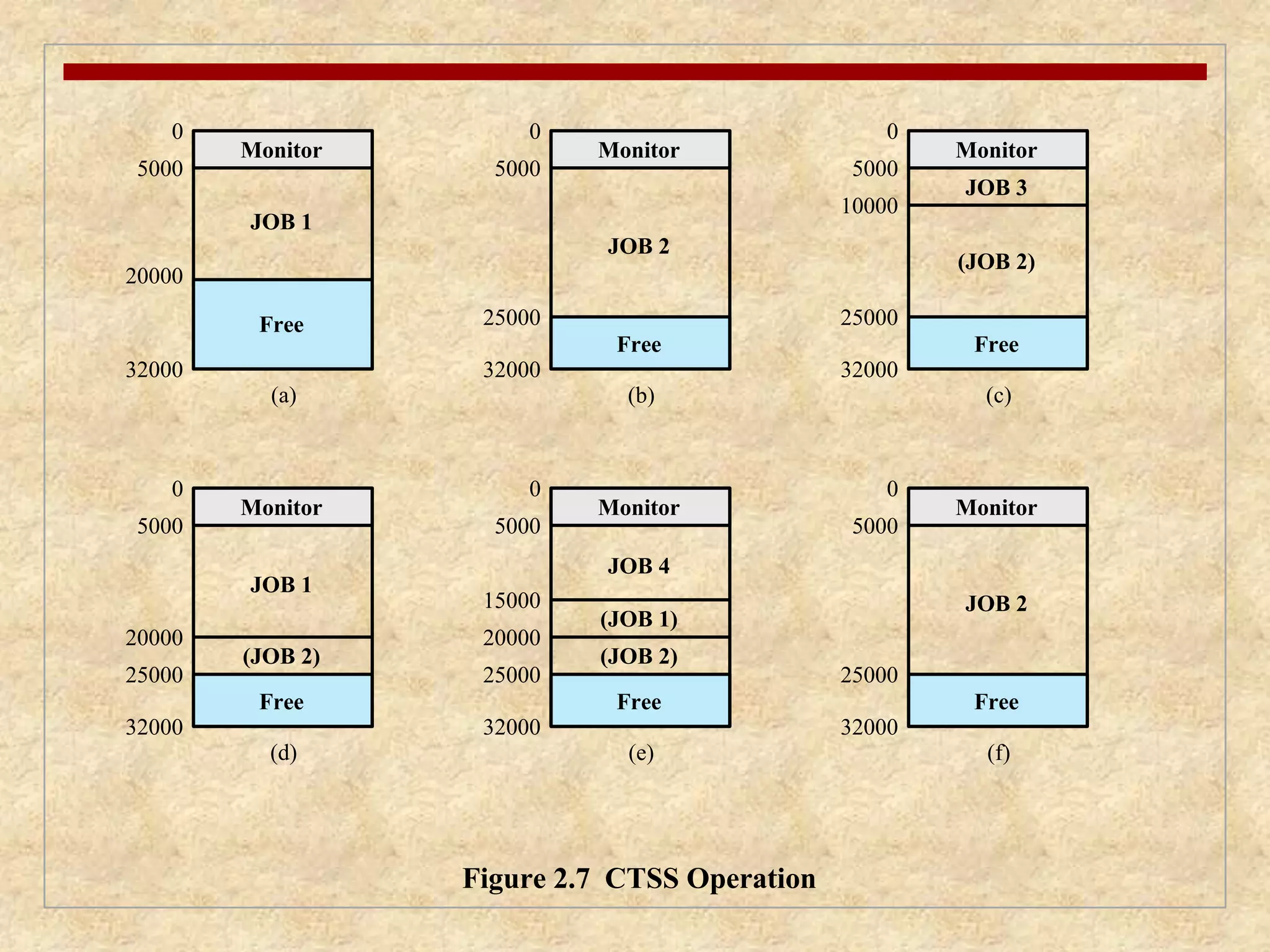
Discusses CTSS implementation, key features, and time slicing methods for user management.
Highlights complexities and major developments in OS including processes, memory management, scheduling.
Defines a process as a running program instance, crucial for OS structure and resource management.
Describes timing and synchronization challenges in multiprogramming and real-time systems.
Identifies error causes in programs, such as deadlocks, improper synchronization, and failed mutual exclusion.
Breaks down a process into components, including program, data, and execution context.
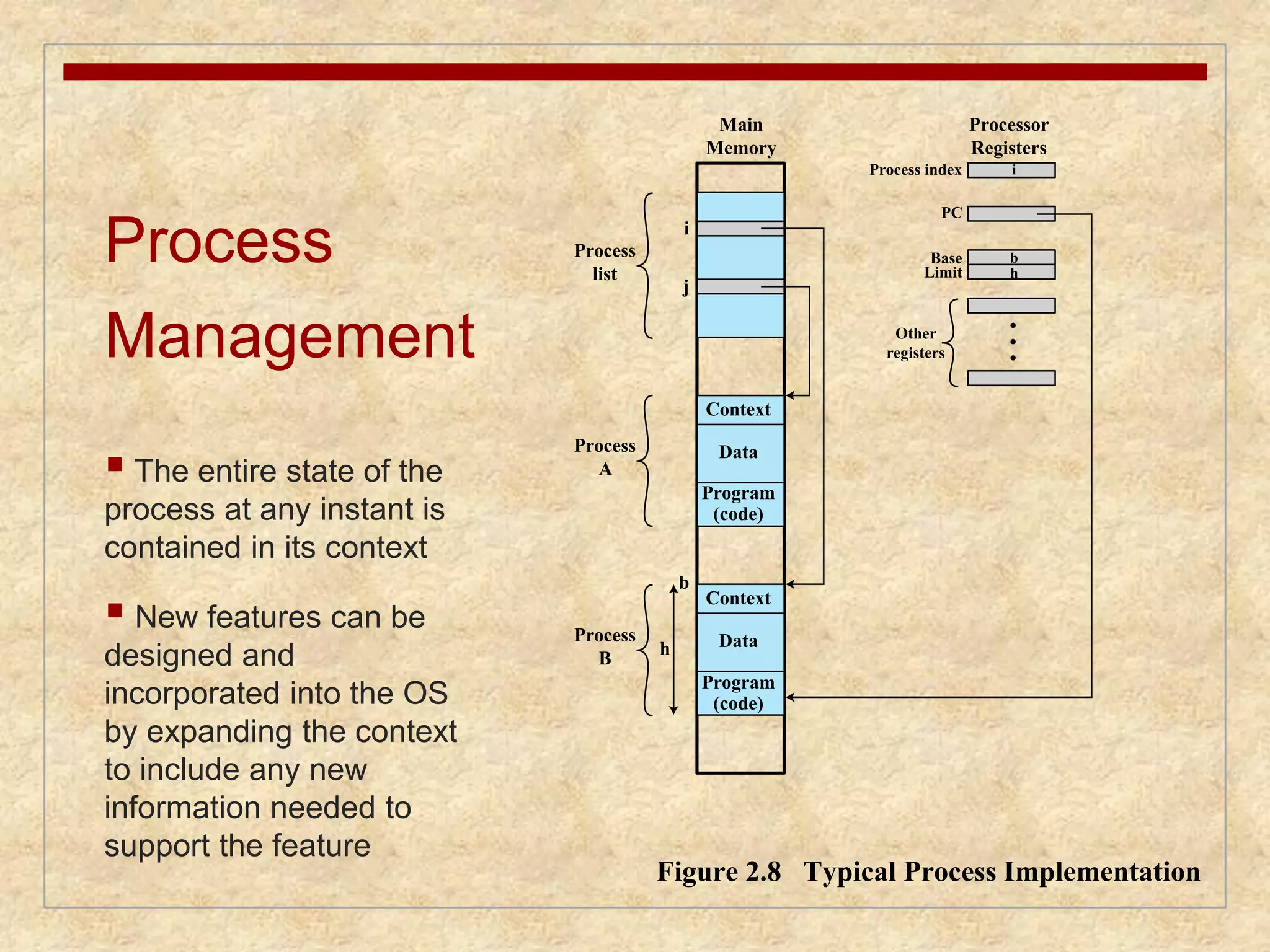
Details process context and how it encapsulates the state and resources of a process.
Enumerates five principal responsibilities of OS in managing memory including allocation and protection.
Describes virtual memory’s ability to let programs address memory logically, aiding concurrency.
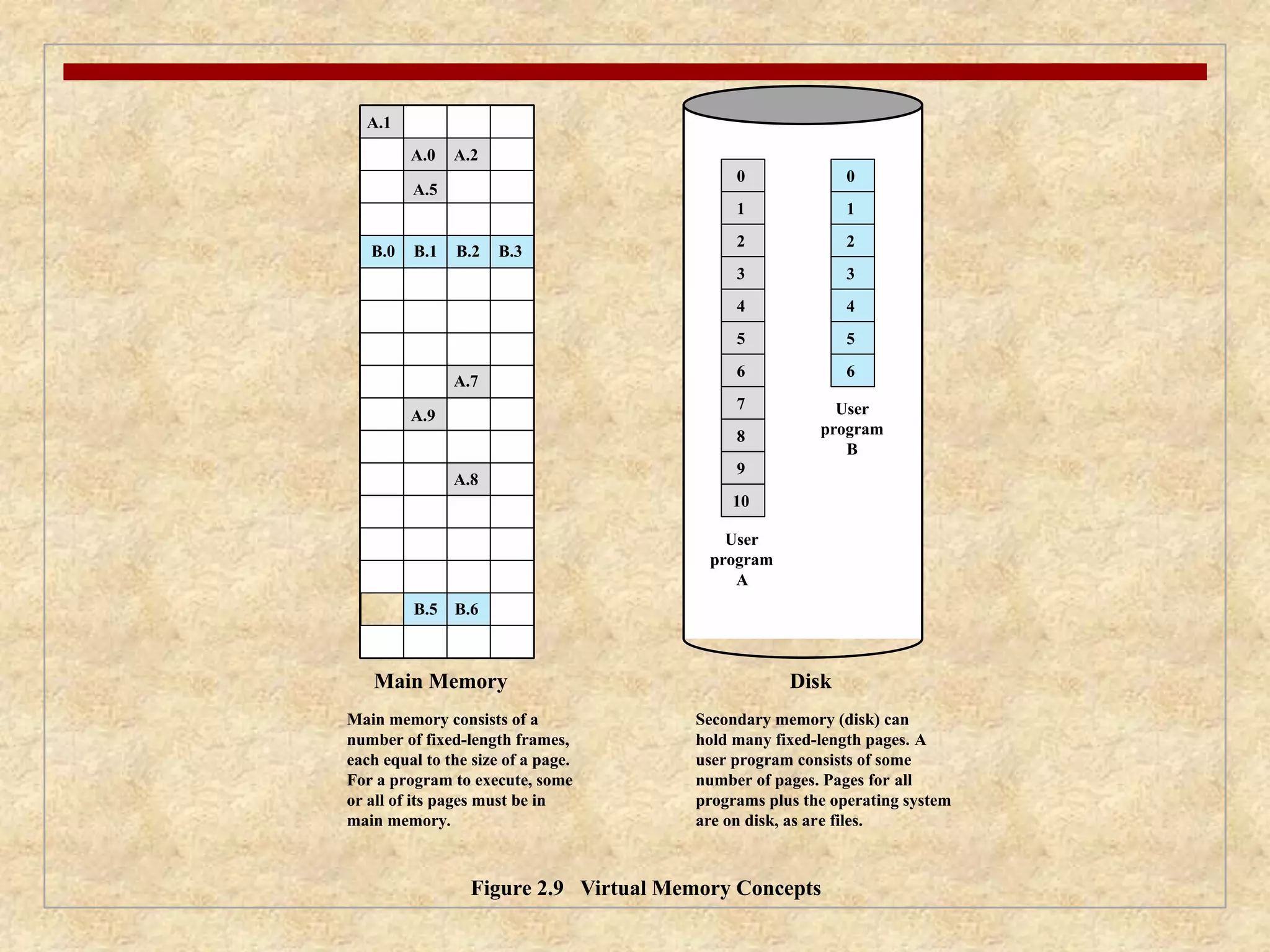
Explains paging mechanism for memory management allowing dynamic memory allocation.
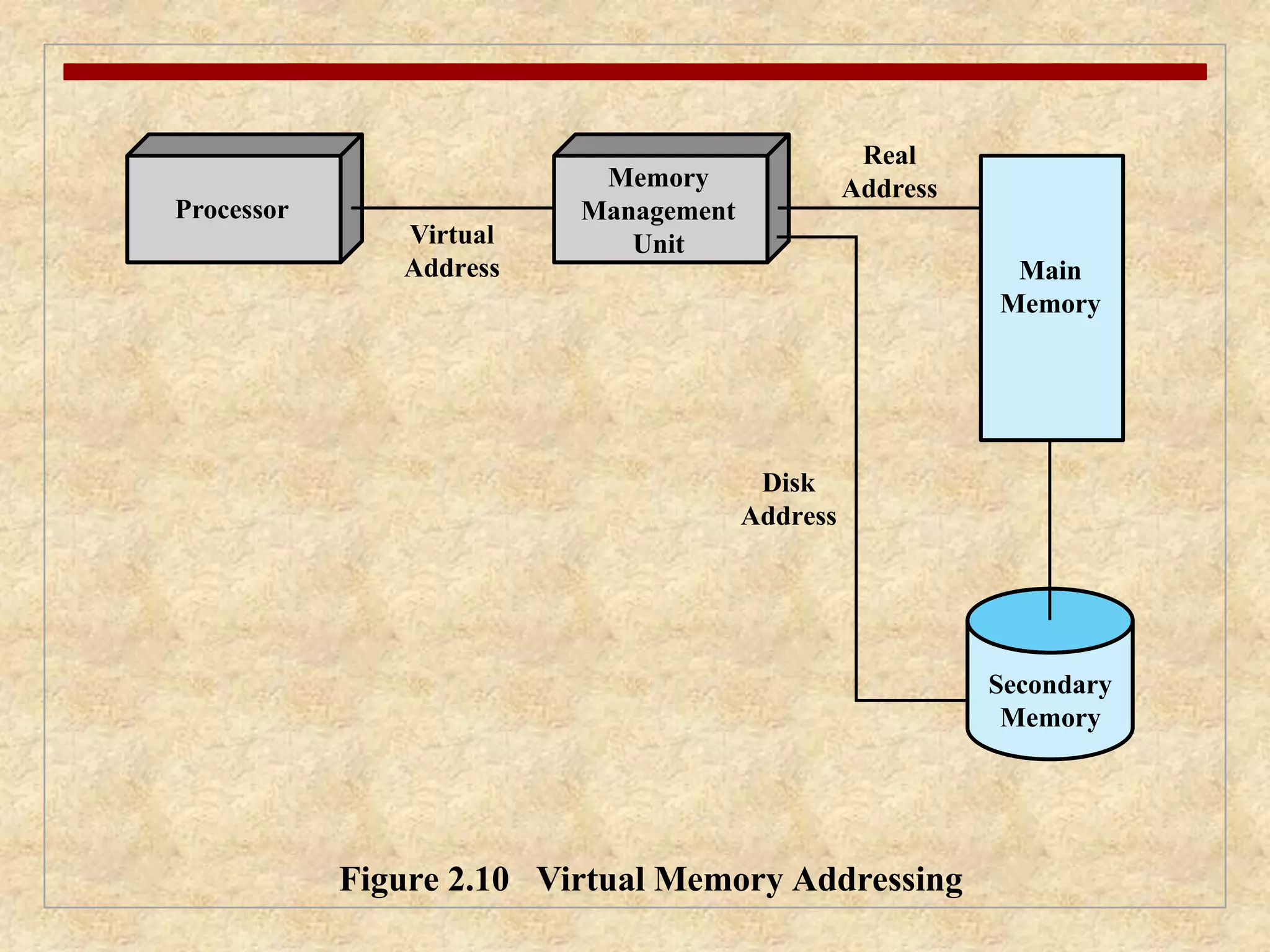
Illustrates the mapping between virtual and physical addresses through memory management units.
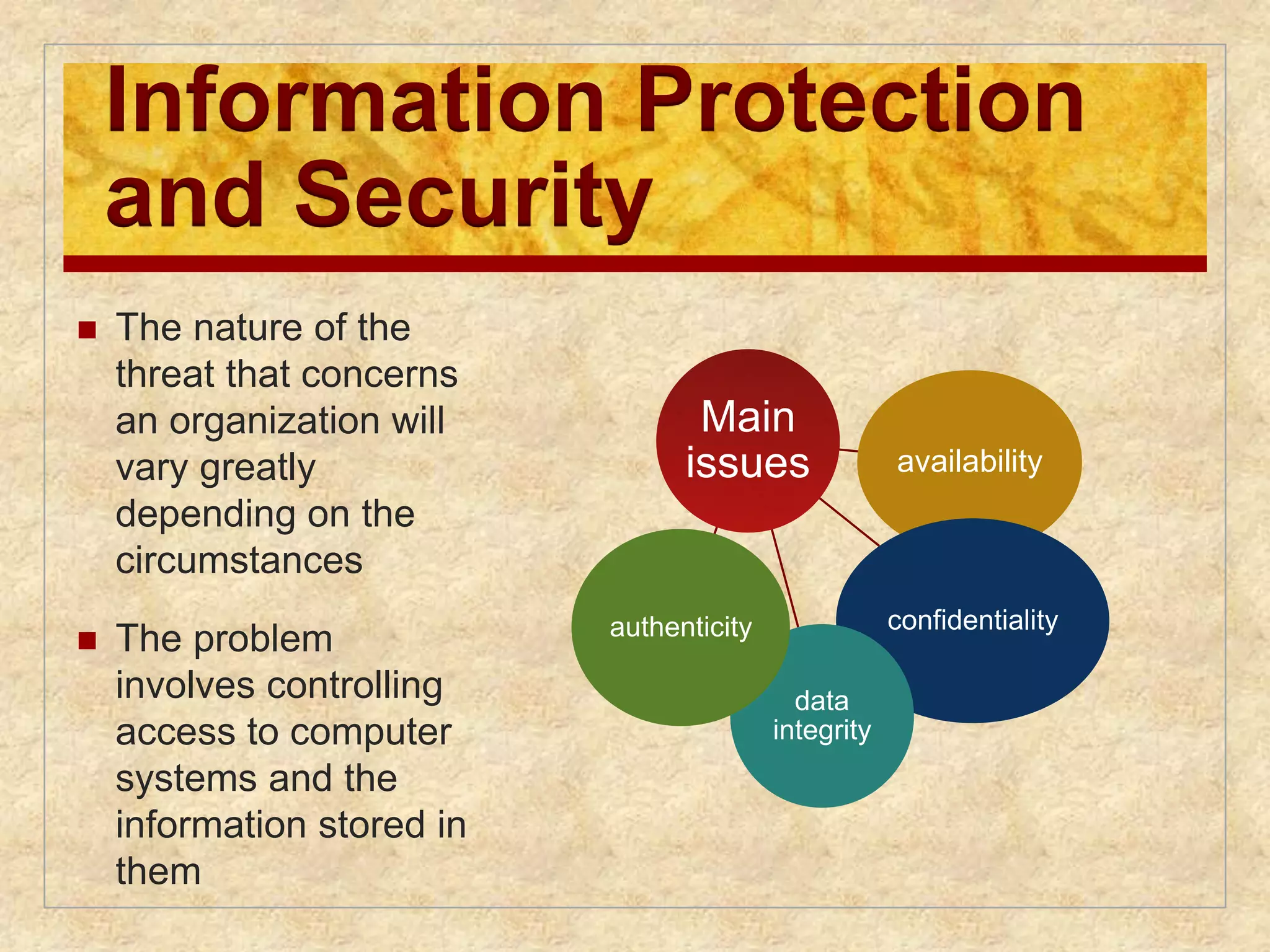
Discusses protecting information in systems against threats while ensuring availability, confidentiality.
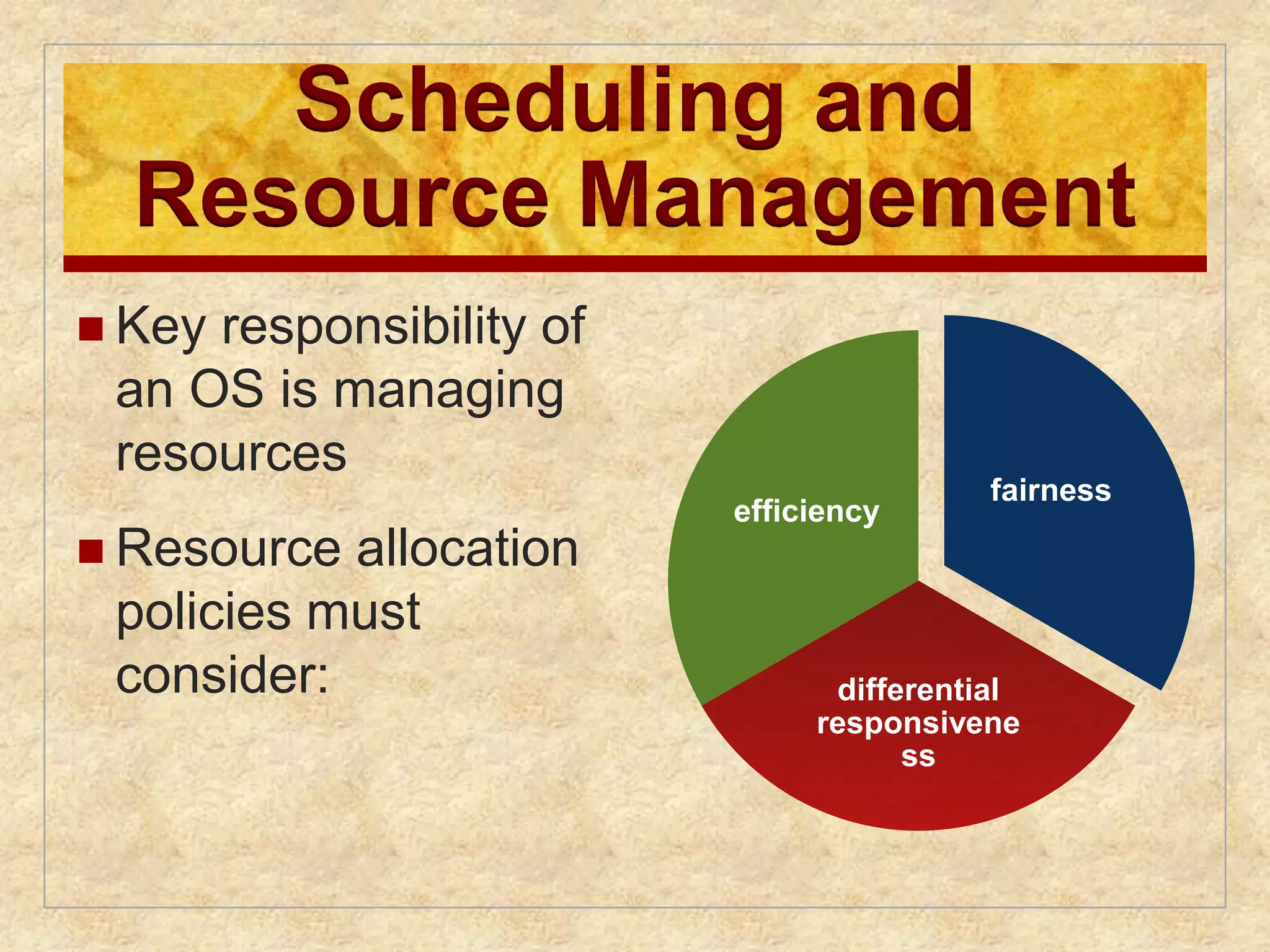
Highlights resource management duties of an OS, focusing on allocation policy considerations.
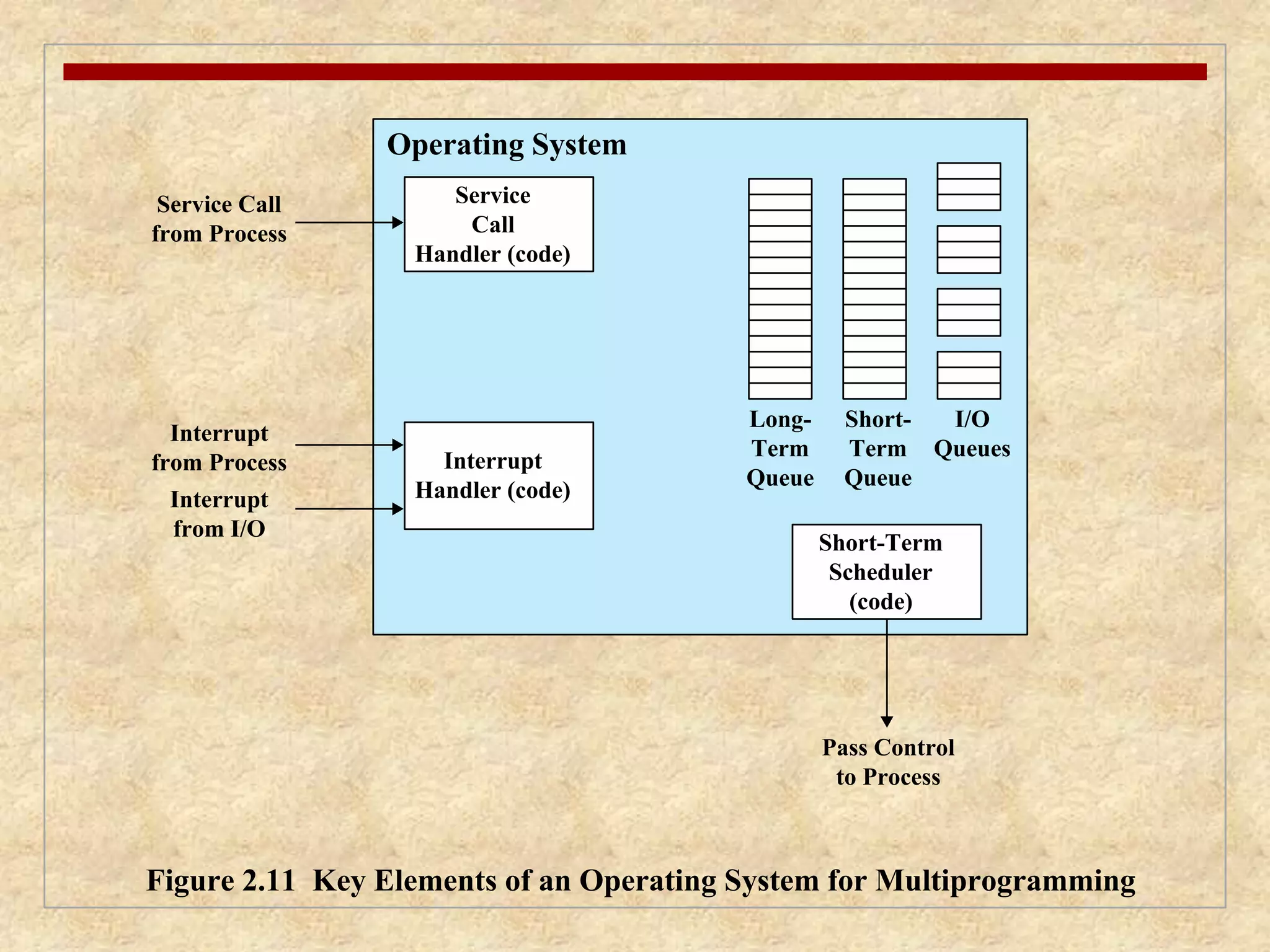
Introduces essential elements for OS operation in a multiprogramming environment.
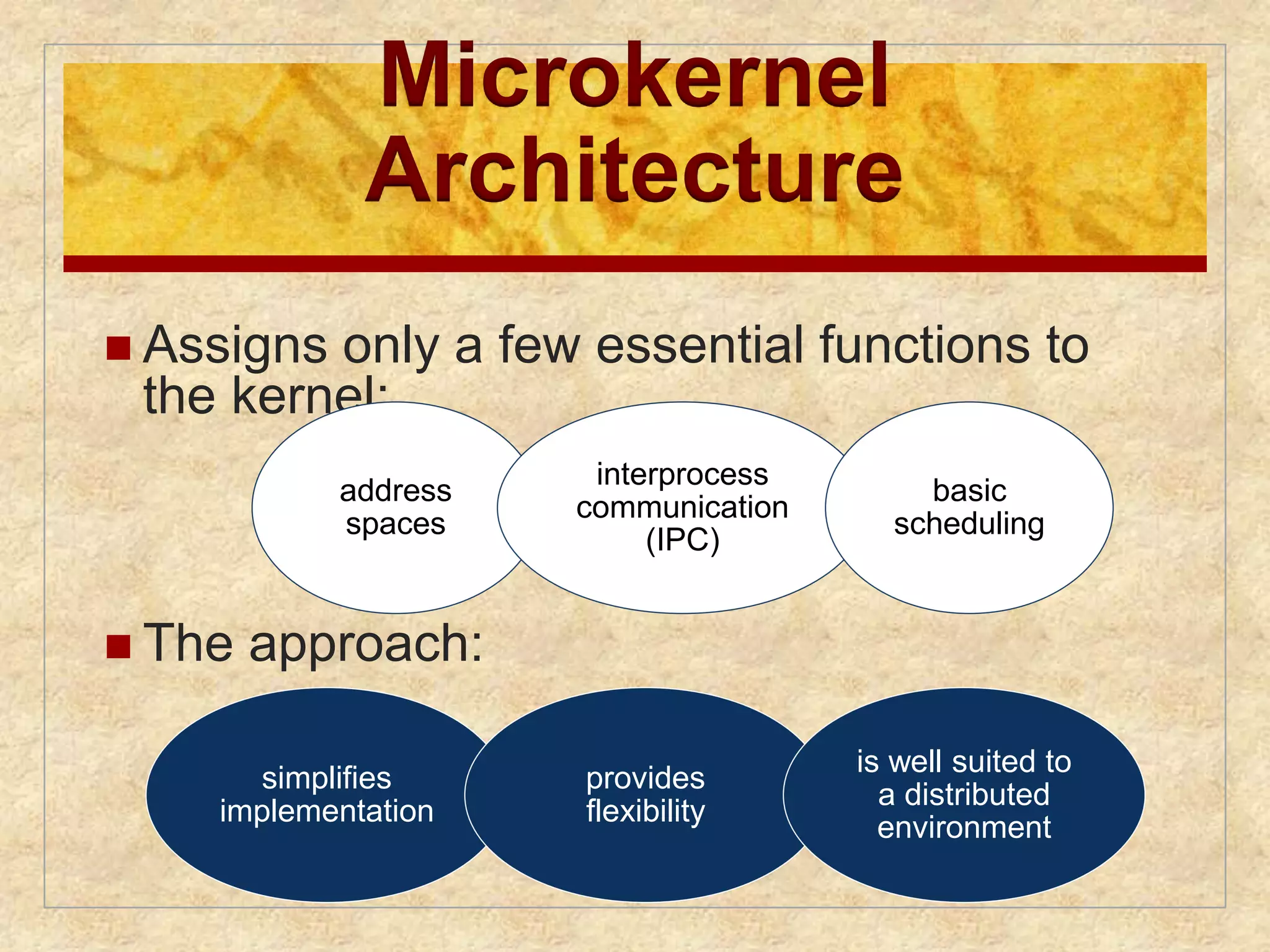
Discusses various architectural approaches to OS, including microkernel and distributed systems.
Describes the microkernel architecture's essential functions and its flexibility advantages.
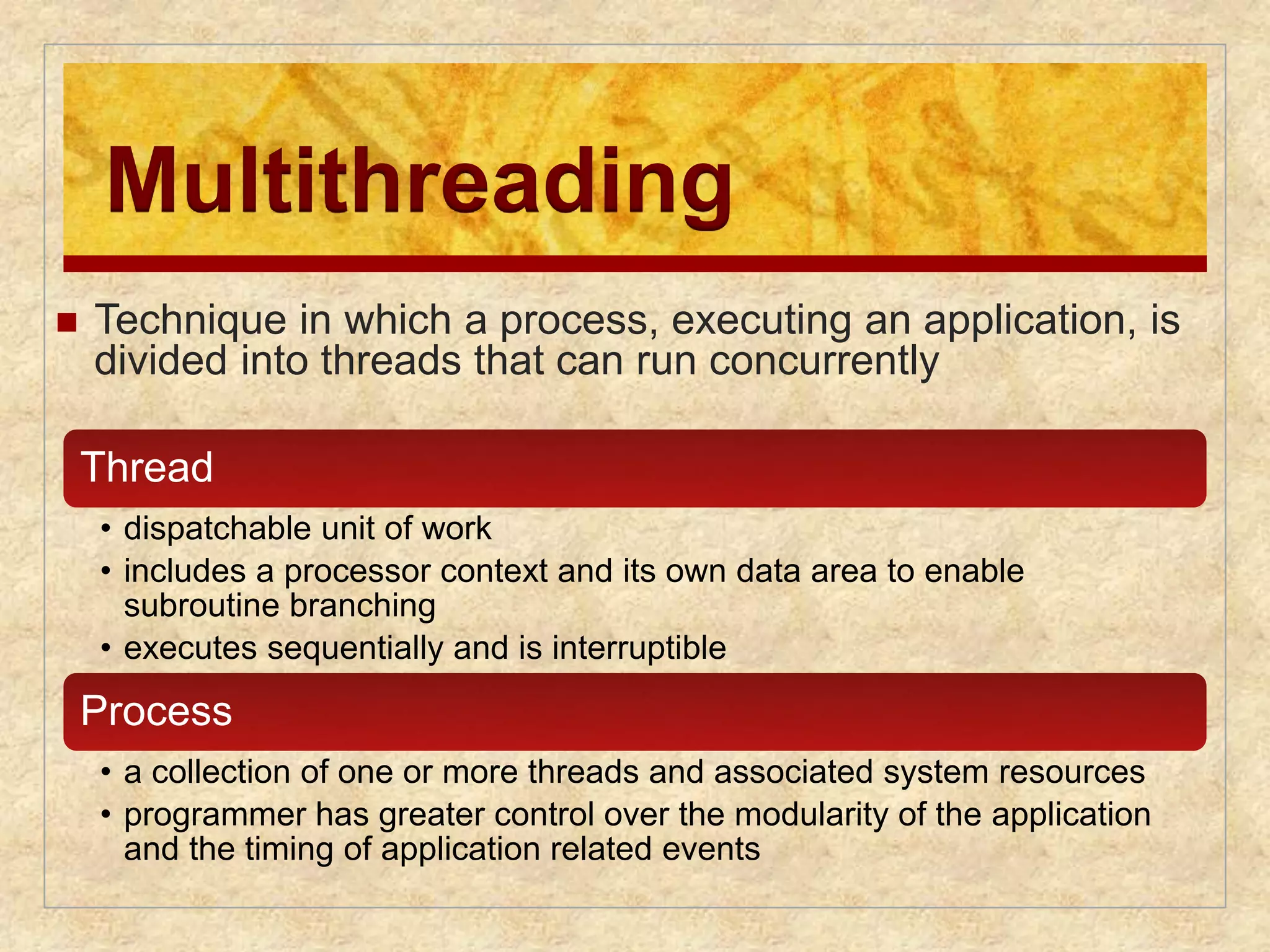
Explains multithreading, dividing processes into threads for concurrent execution.
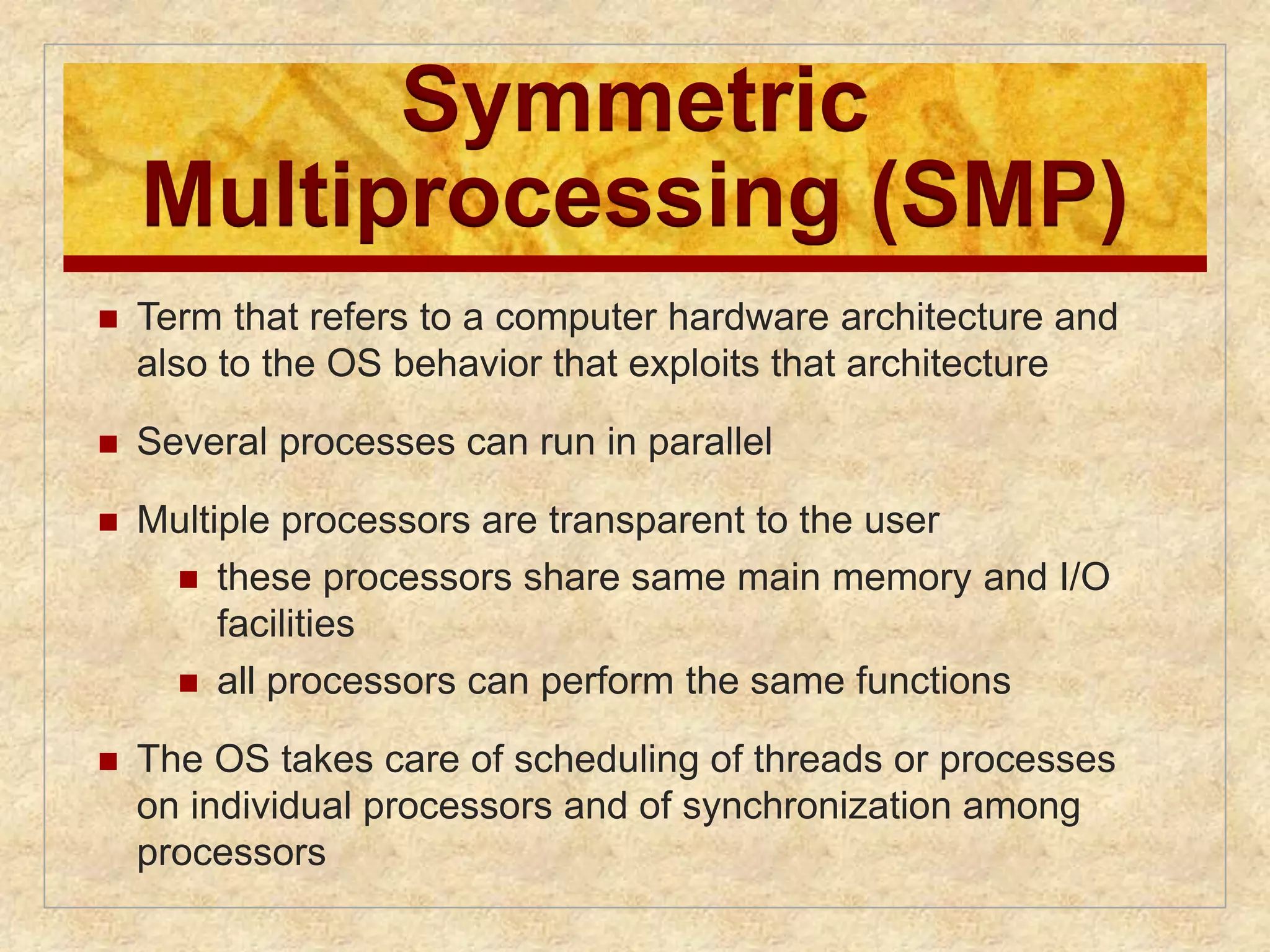
Defines symmetric multiprocessing (SMP) and highlights transparency to users.
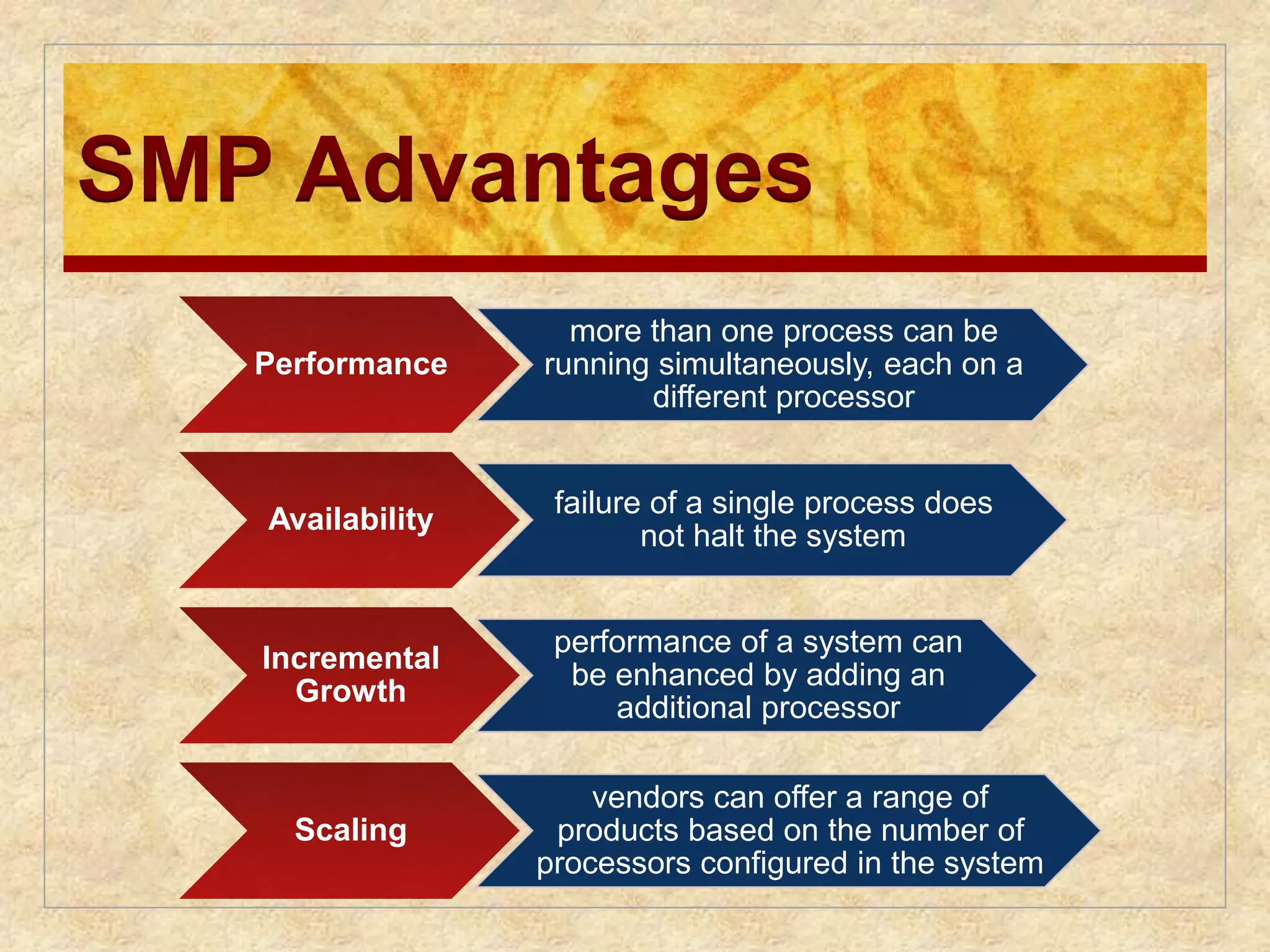
Discusses performance benefits and reliability of symmetric multiprocessing systems.
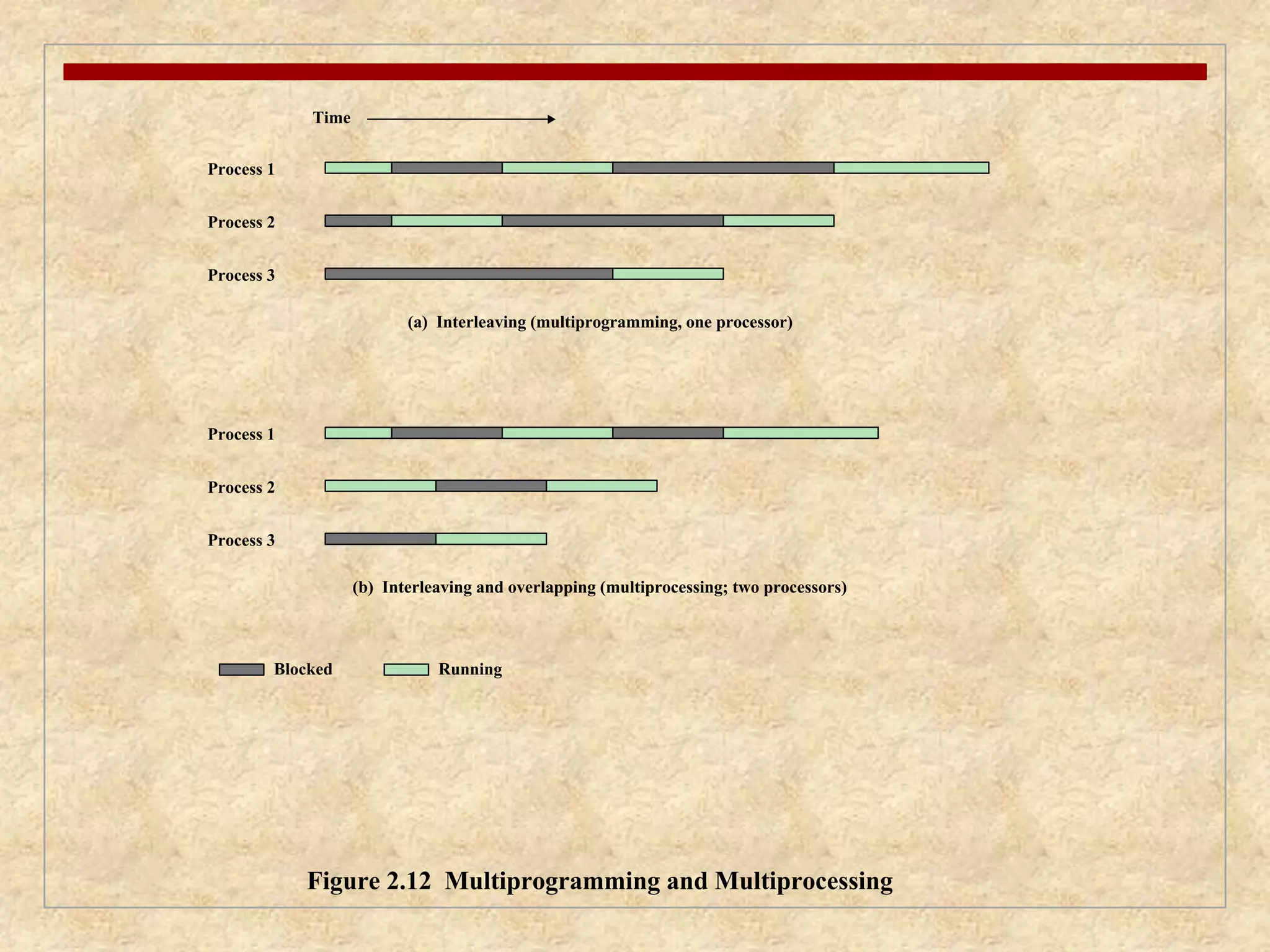
Illustrates task interleaving in multiprogramming and overlapping in multiprocessing.
Introduces distributed OS providing unified memory access and management principles.
Defines fault tolerance in systems to ensure continued operation despite faults.
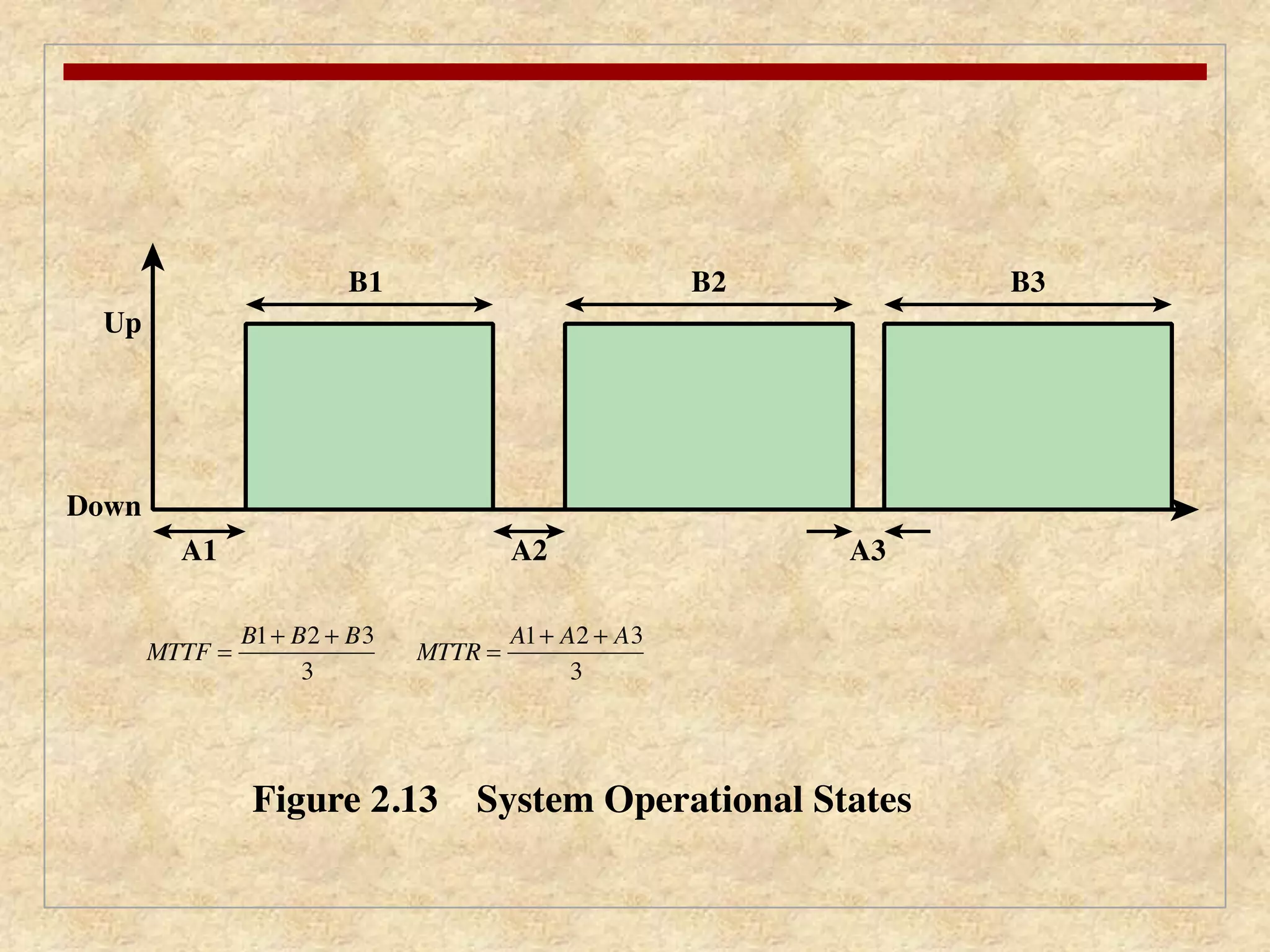
Describes key reliability metrics like mean time to failure and system availability.
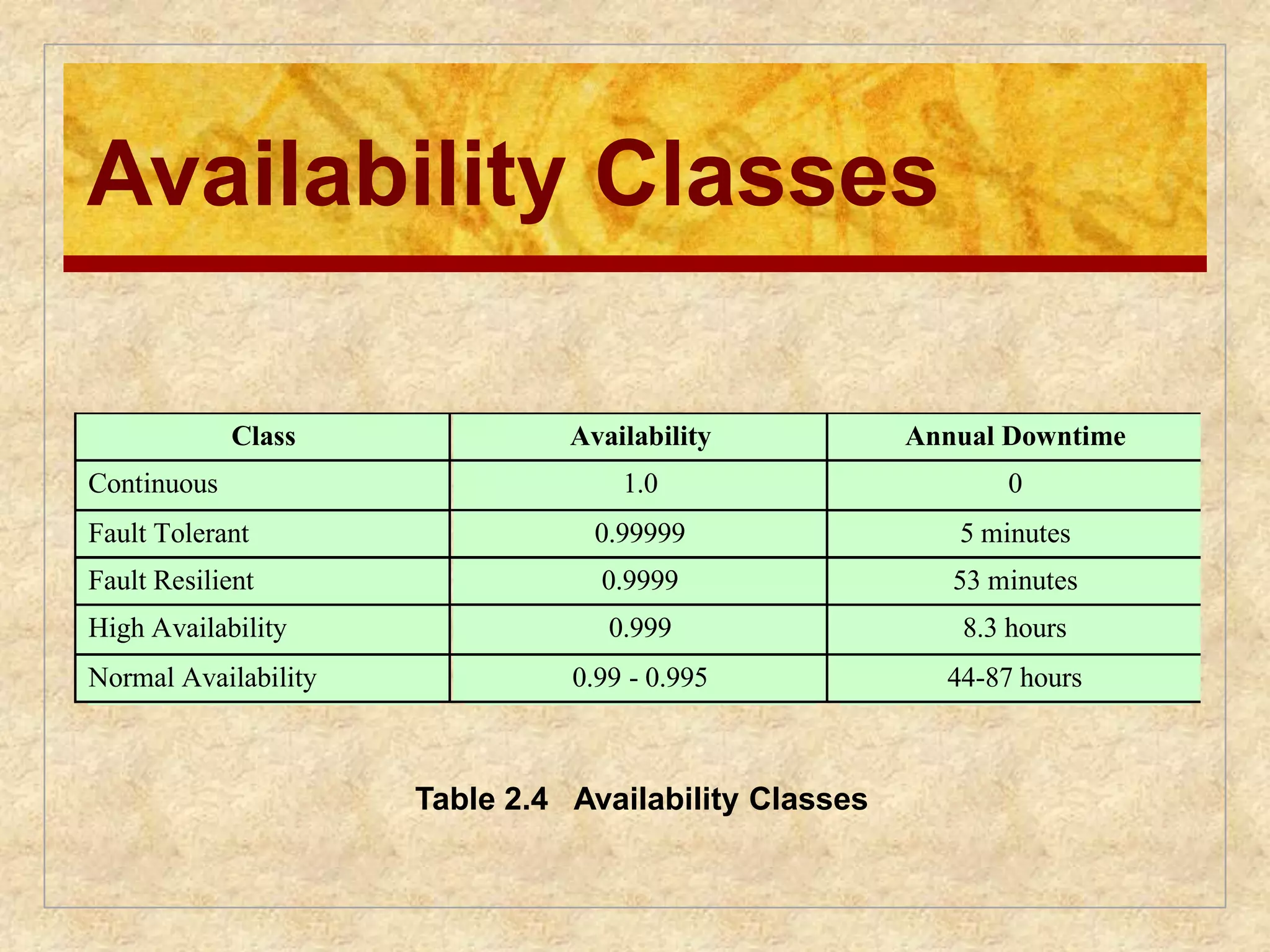
Outlines different system availability classes along with their annual downtimes.
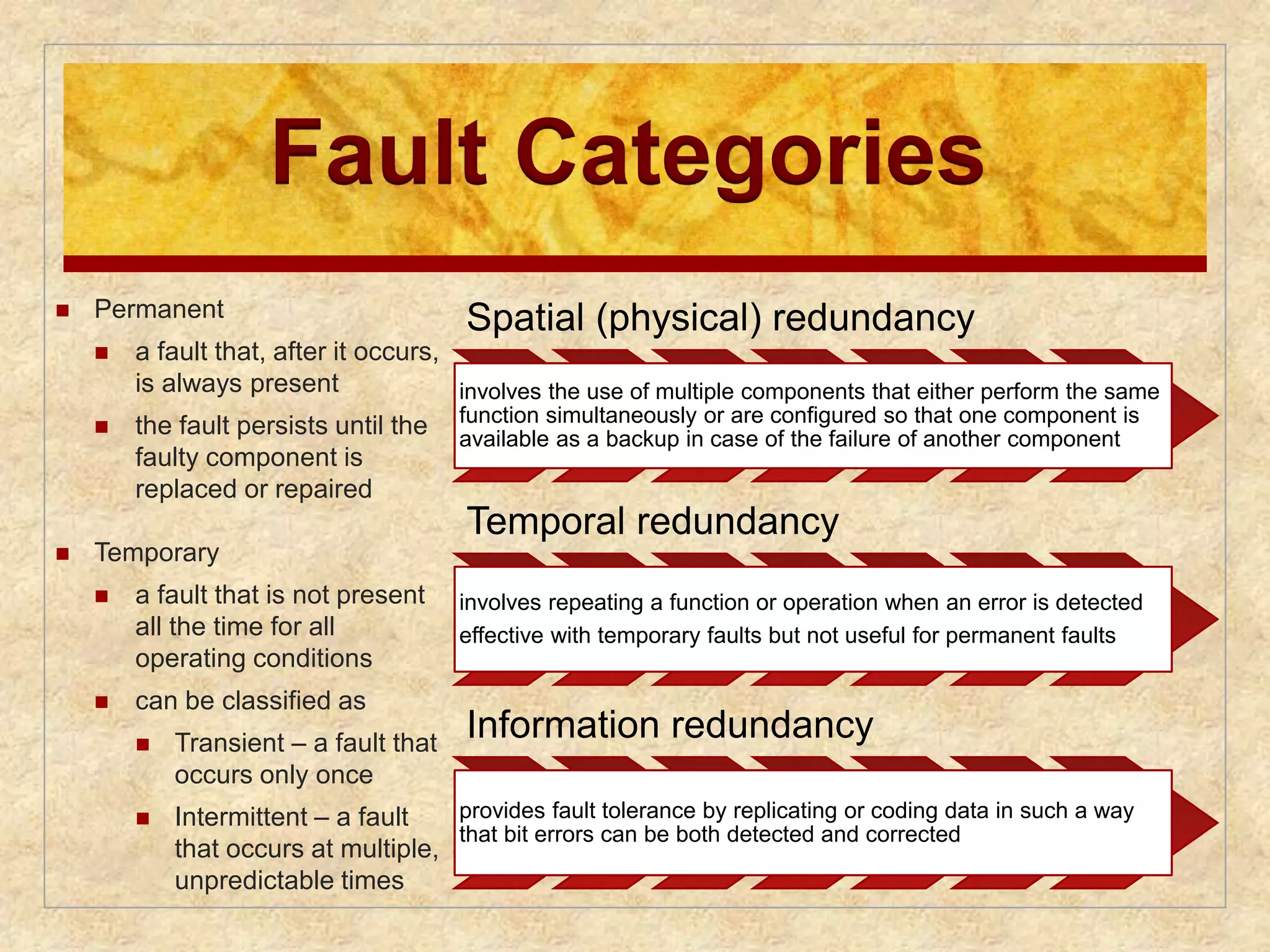
Describes different fault categories and the concepts of redundancy in systems.
Identifies mechanisms in OS for fault tolerance including isolation and concurrency.
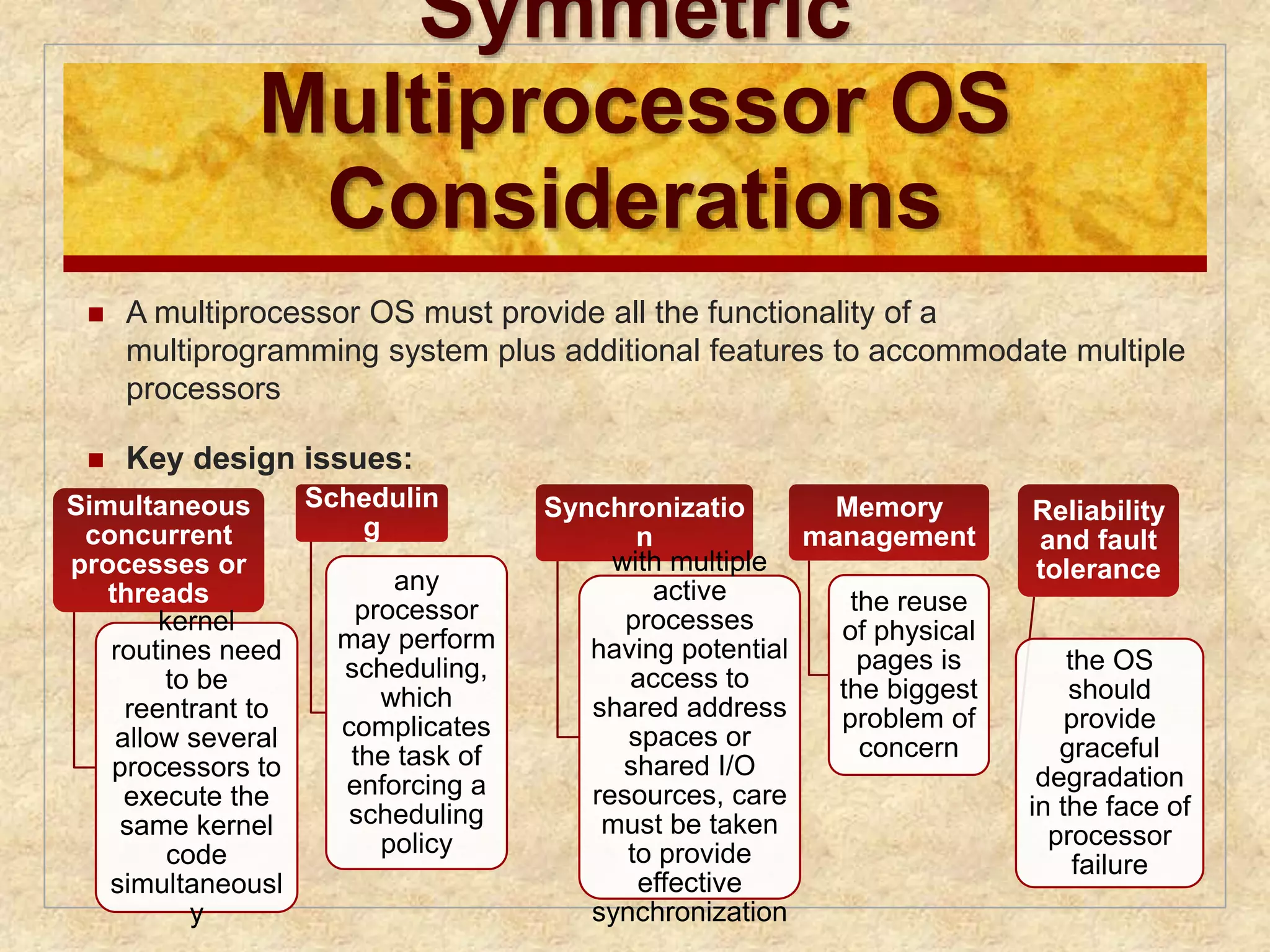
Covers additional design considerations for OS functioning with multiple processors.
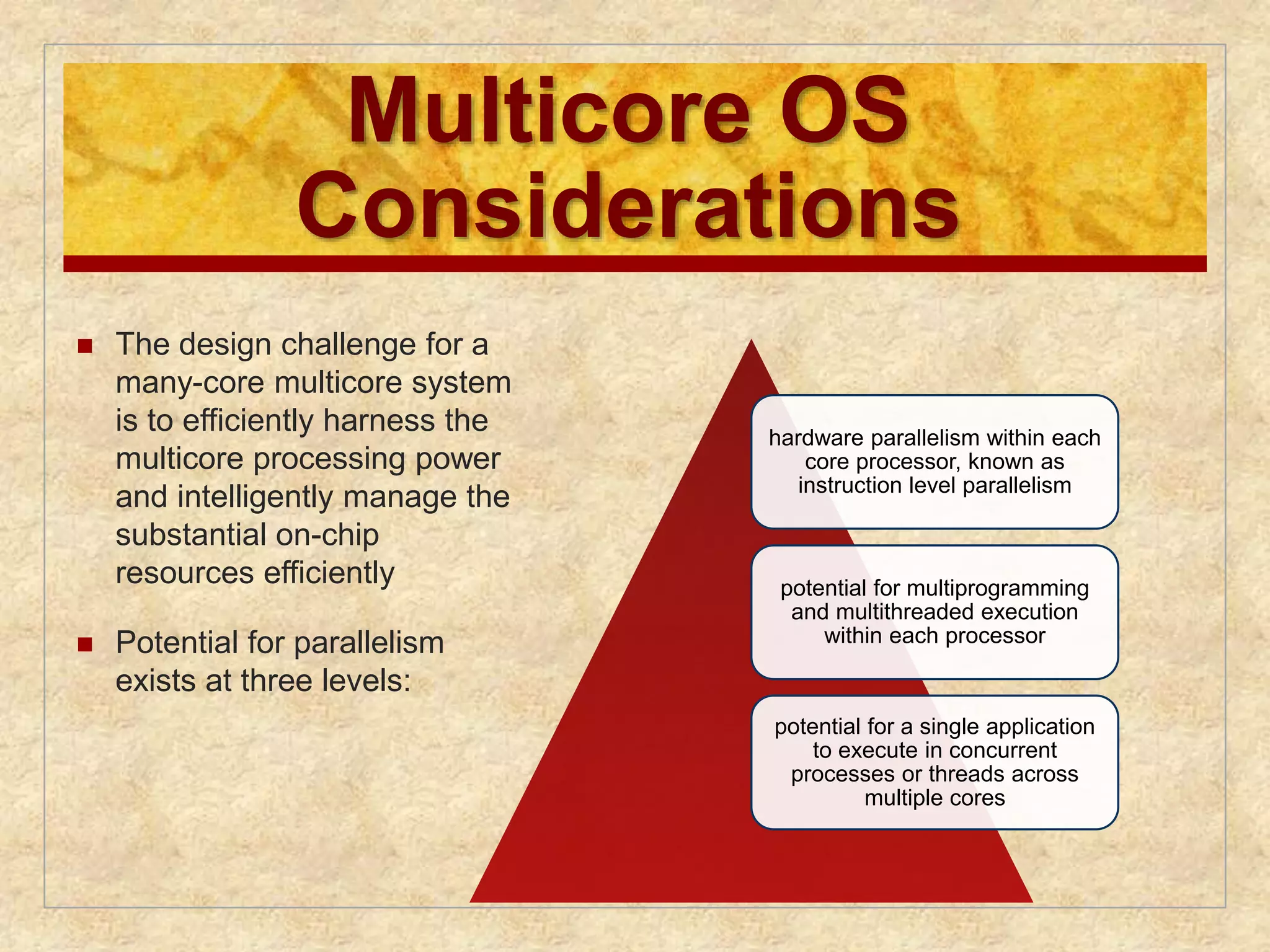
Discusses design challenges in multicore systems for efficient resource management.
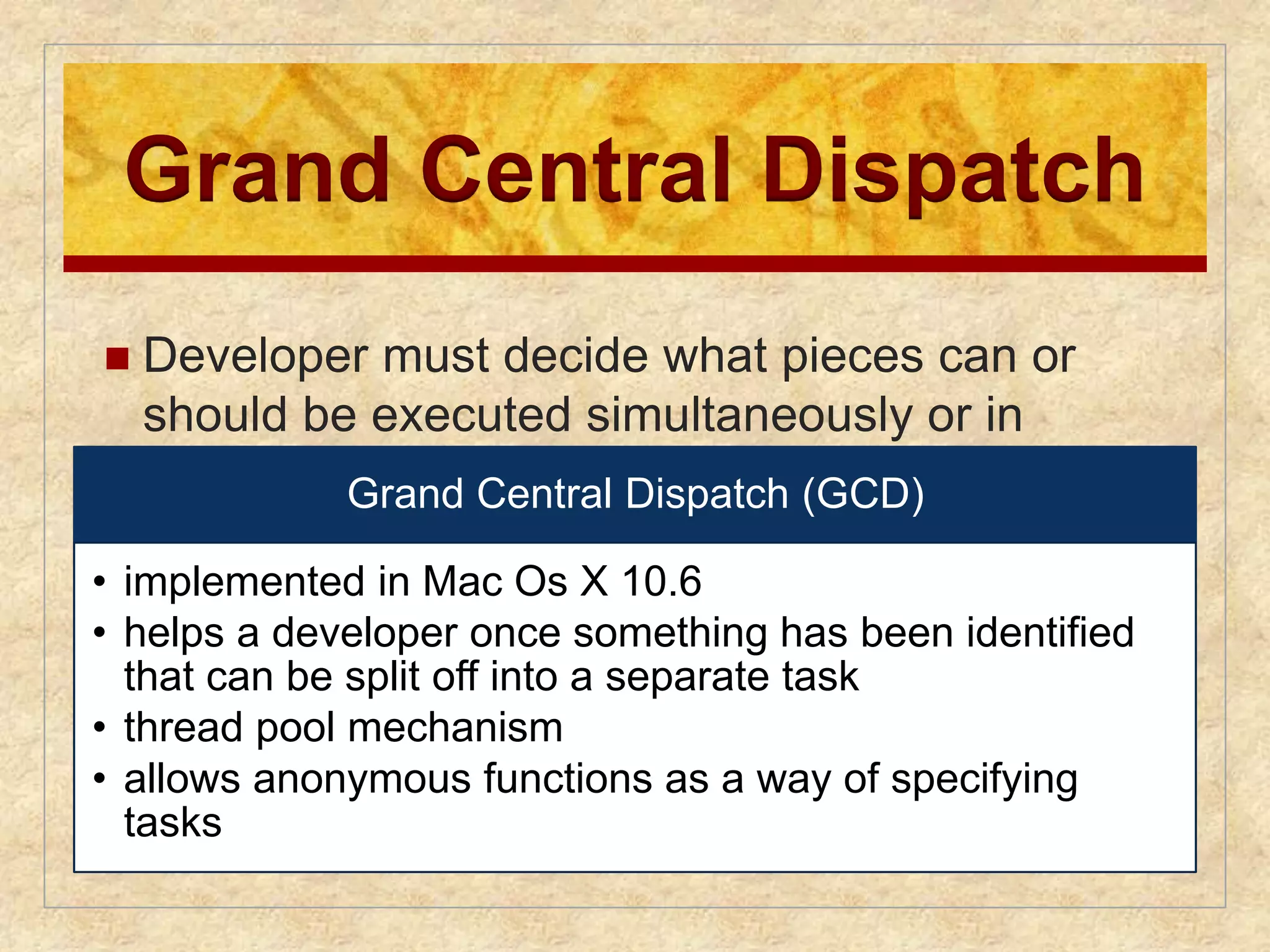
Explains GCD in Mac OS for task management and parallel execution.
Describes virtual machine management for core allocation to processes.
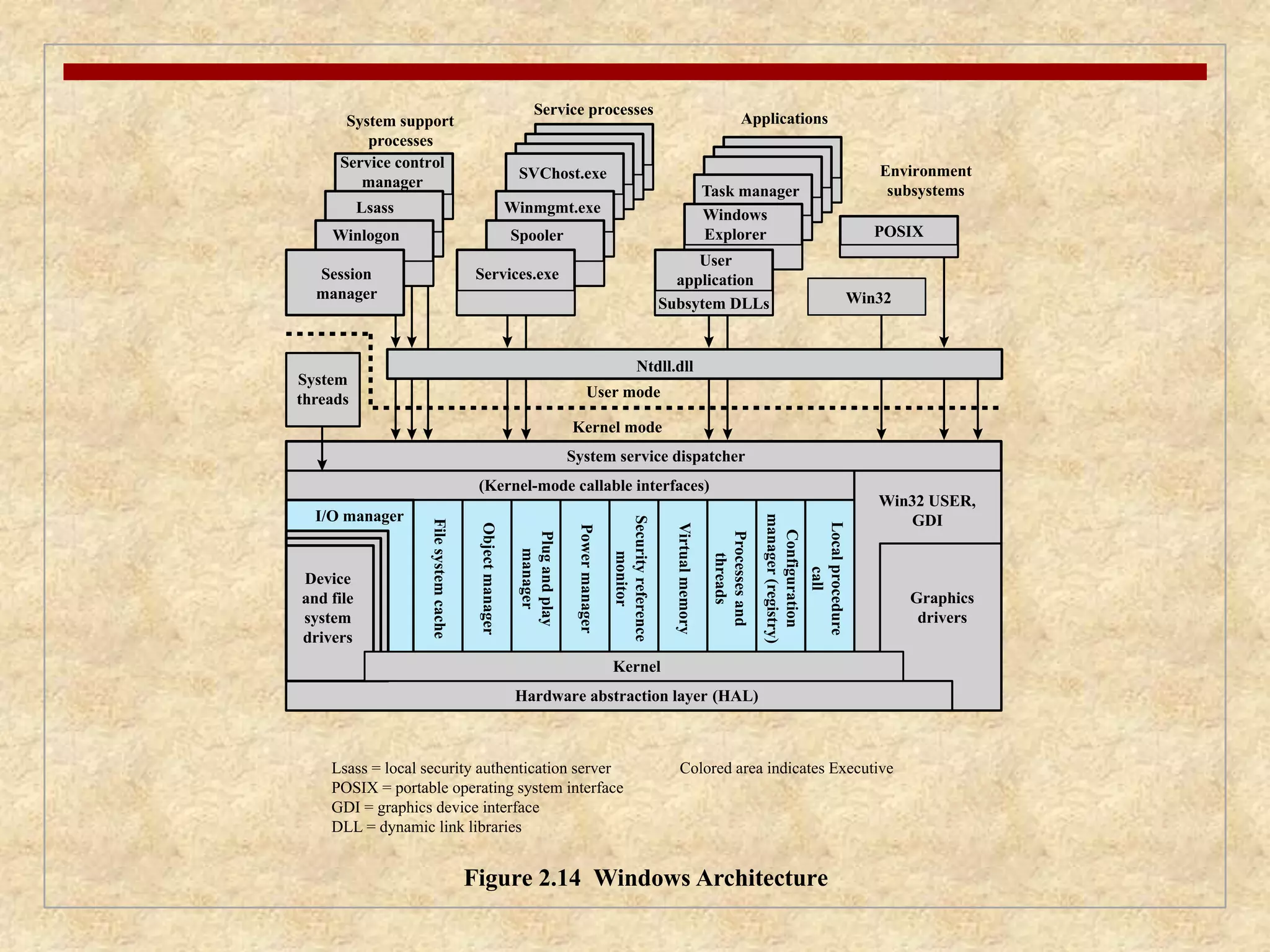
Illustrates Windows OS architecture, highlighting user-mode and kernel-mode components.
Details Windows kernel mode components, including executive services and device drivers.
Explains four basic user-mode process types in Windows and their functionalities.
Describes the client/server model in Windows OS emphasizing RPC and system reliability.
Explains thread support and SMP compatibility in Windows for efficient process handling.
Identifies key object-oriented design concepts utilized within Windows OS.
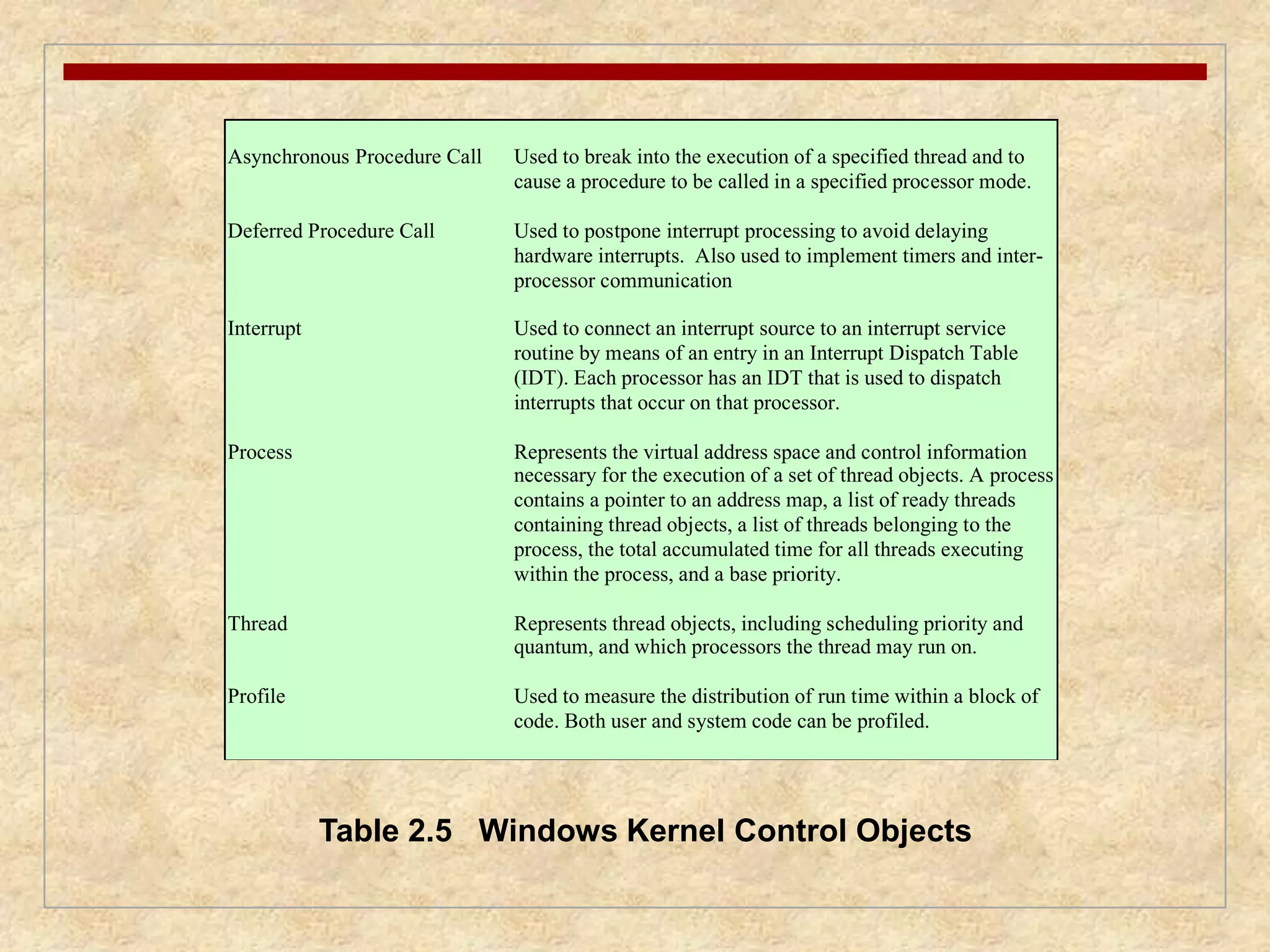
Describes different types of procedure calls and their roles in Windows OS operations.
Details the development of traditional UNIX systems and their significant milestones.
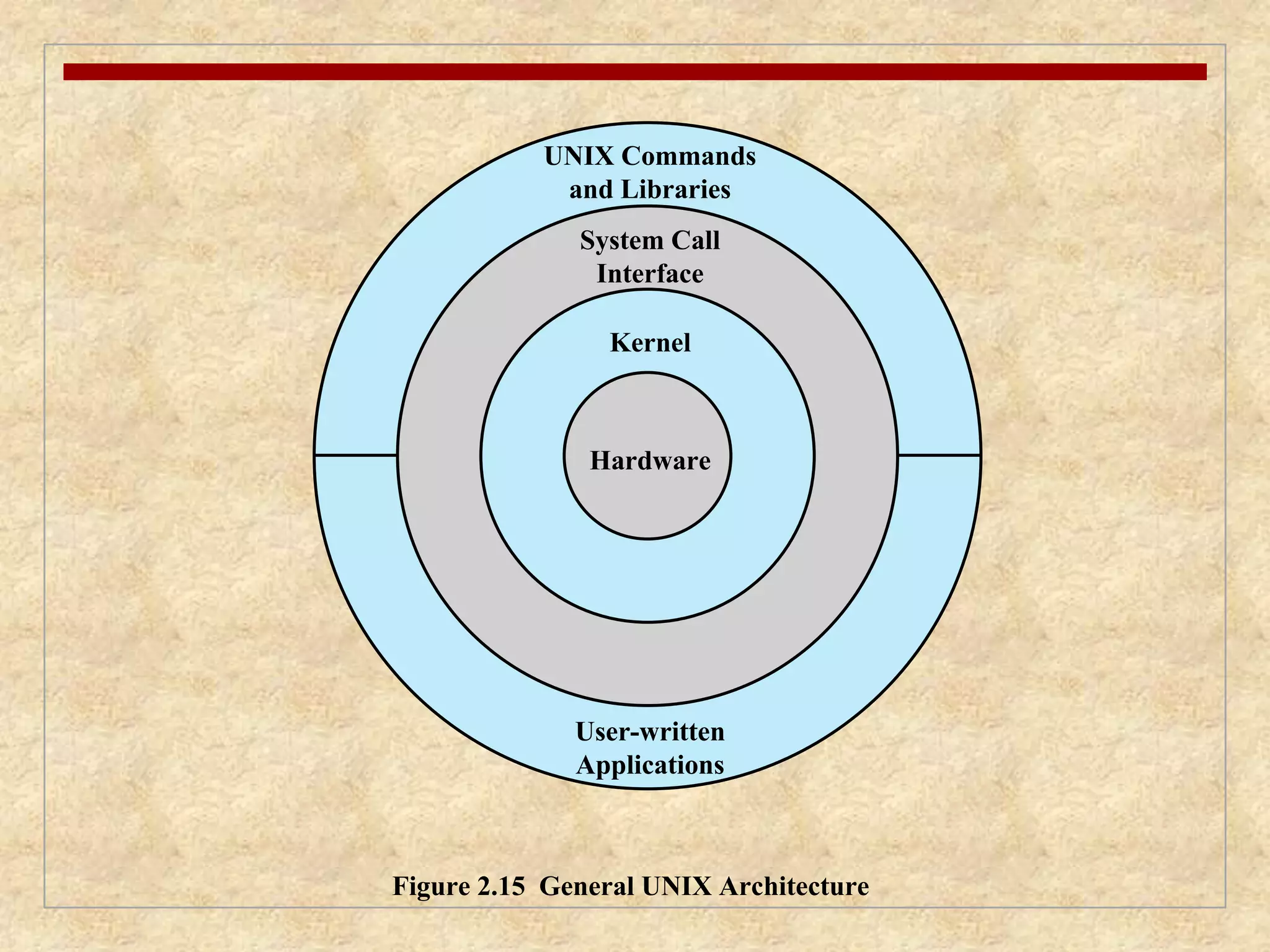
Explains general UNIX architecture and its interaction with user applications.
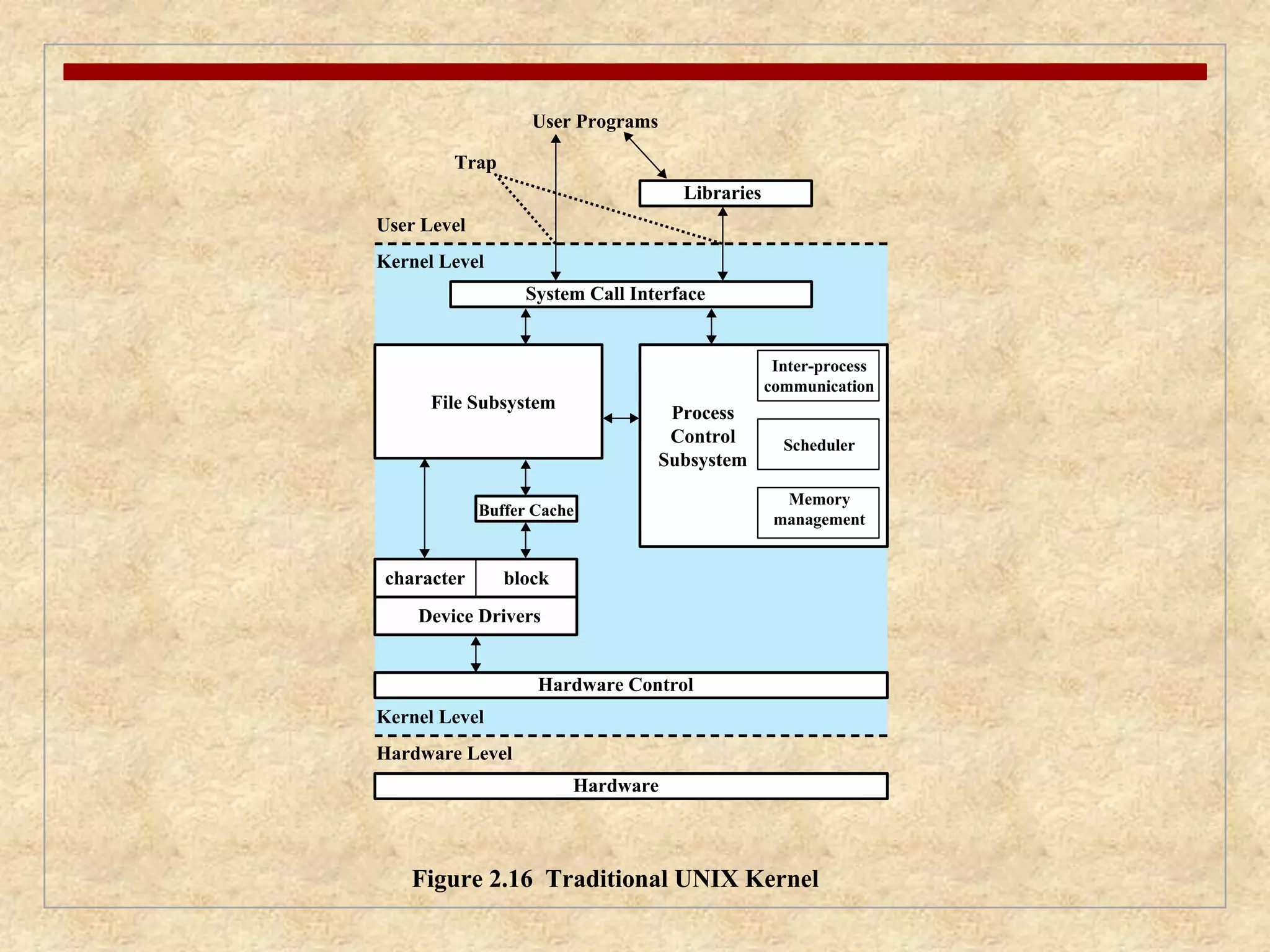
Illustrates components of modern UNIX kernels, including subsystems and device drivers.
Describes the joint development of SVR4 and its advanced features.
Overview of BSD history and its importance in academic and commercial environments.
Highlights key features and advancements of Solaris 10 as an advanced UNIX implementation.
Details the history and growth of Linux as a free UNIX variant.
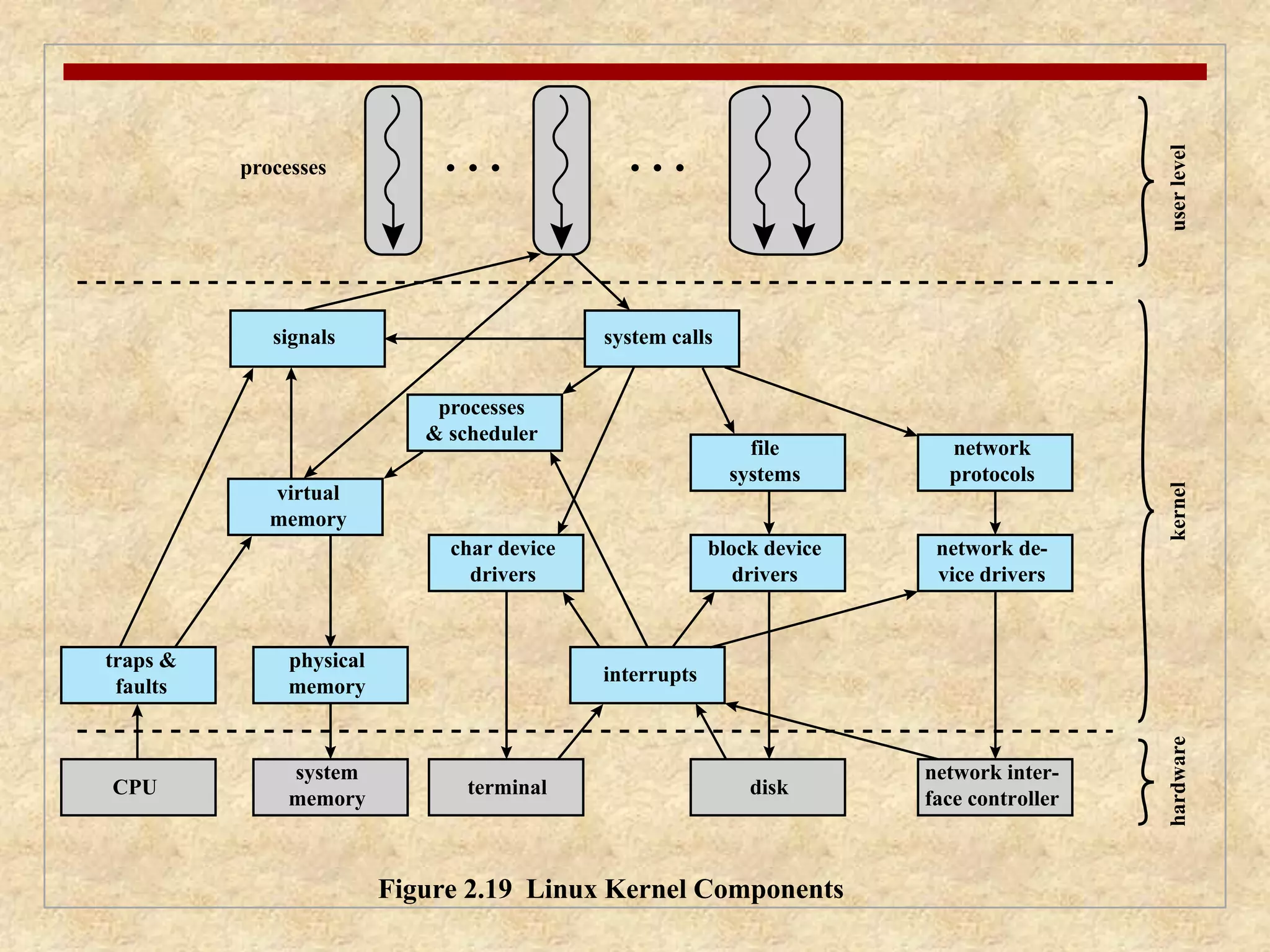
Describes modular monolithic kernel structure of Linux and loadable module characteristics.
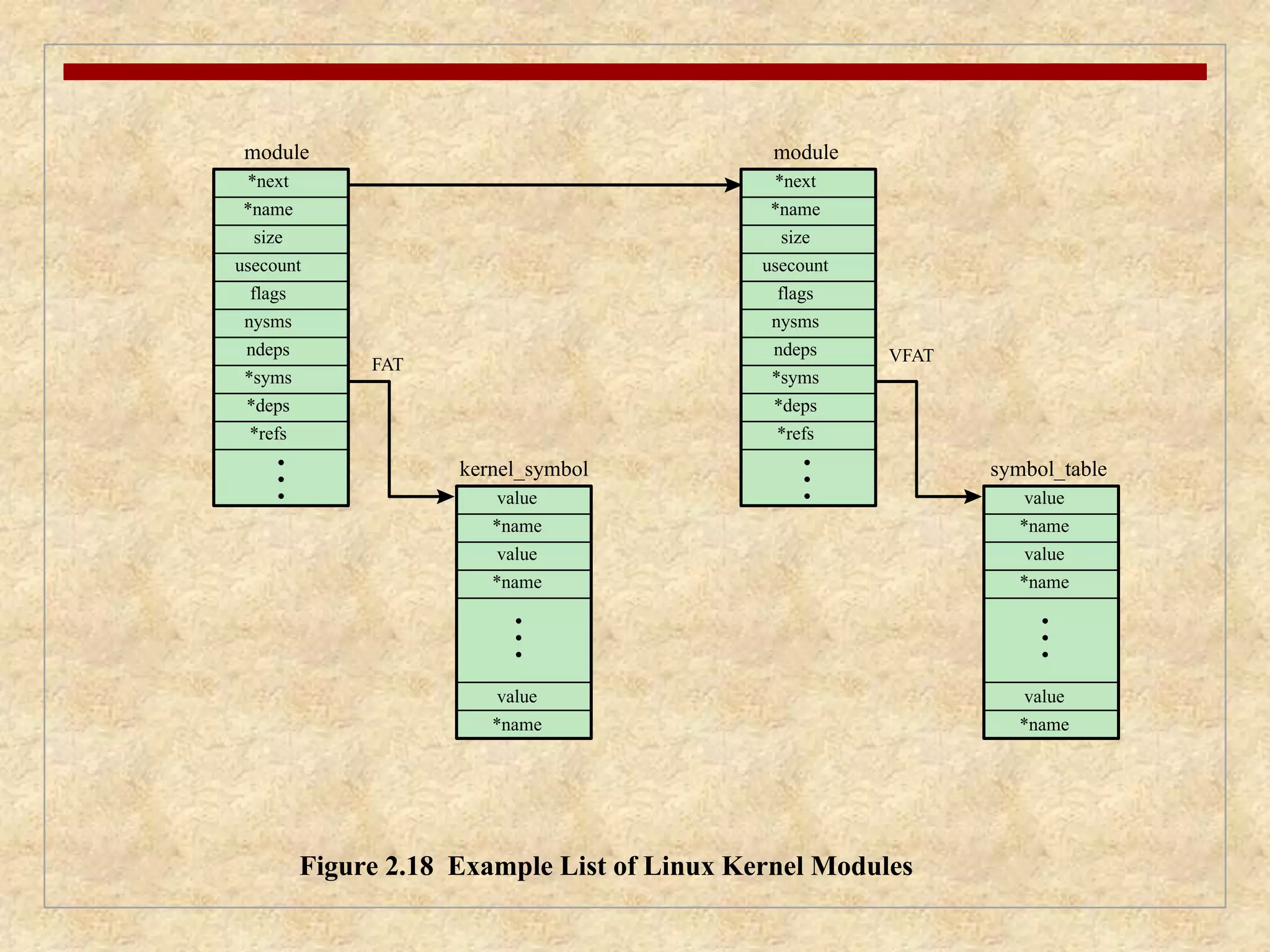
Details various components of the Linux kernel and their functions.
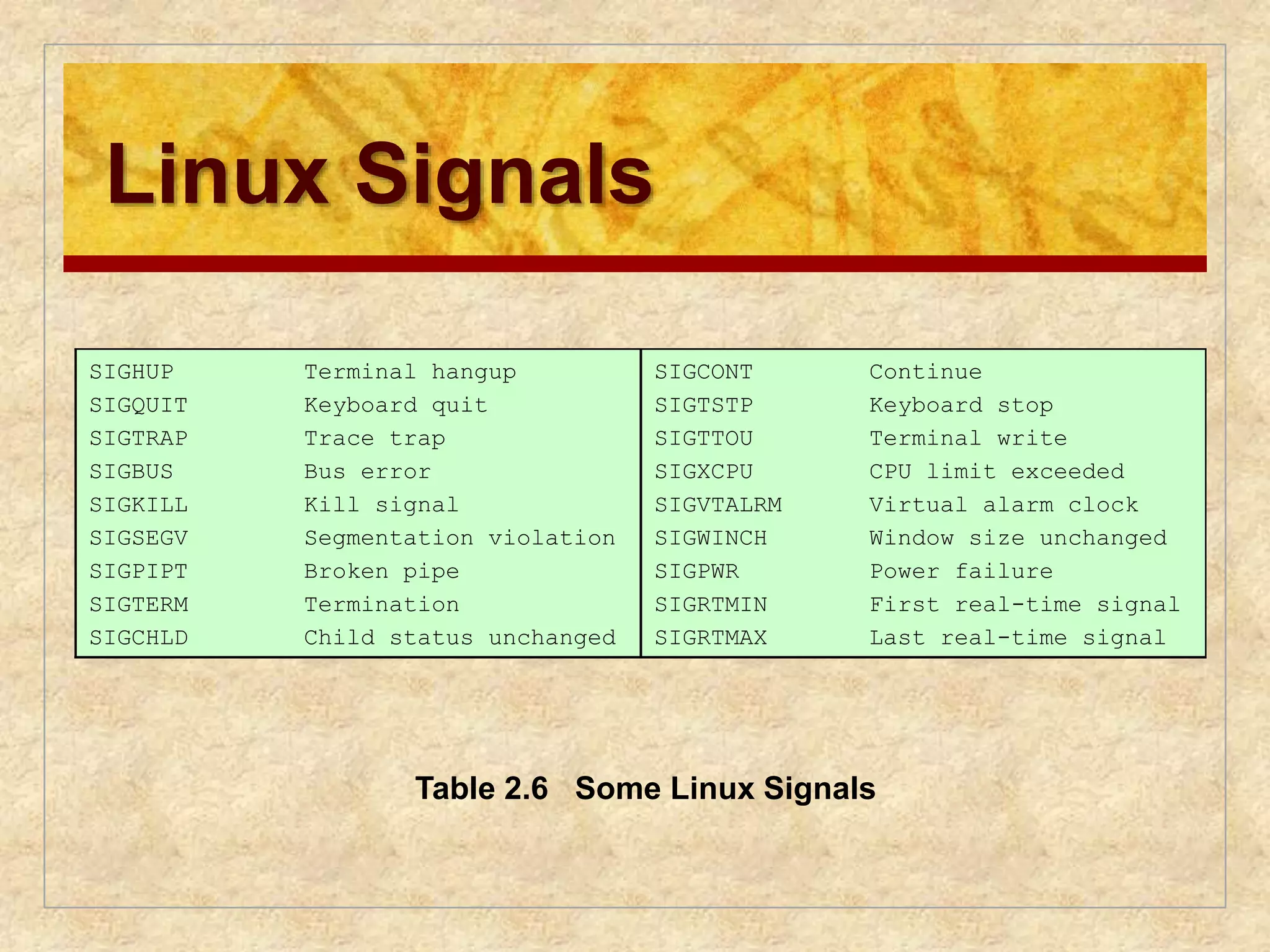
Discusses various Linux signals and their roles in process management.
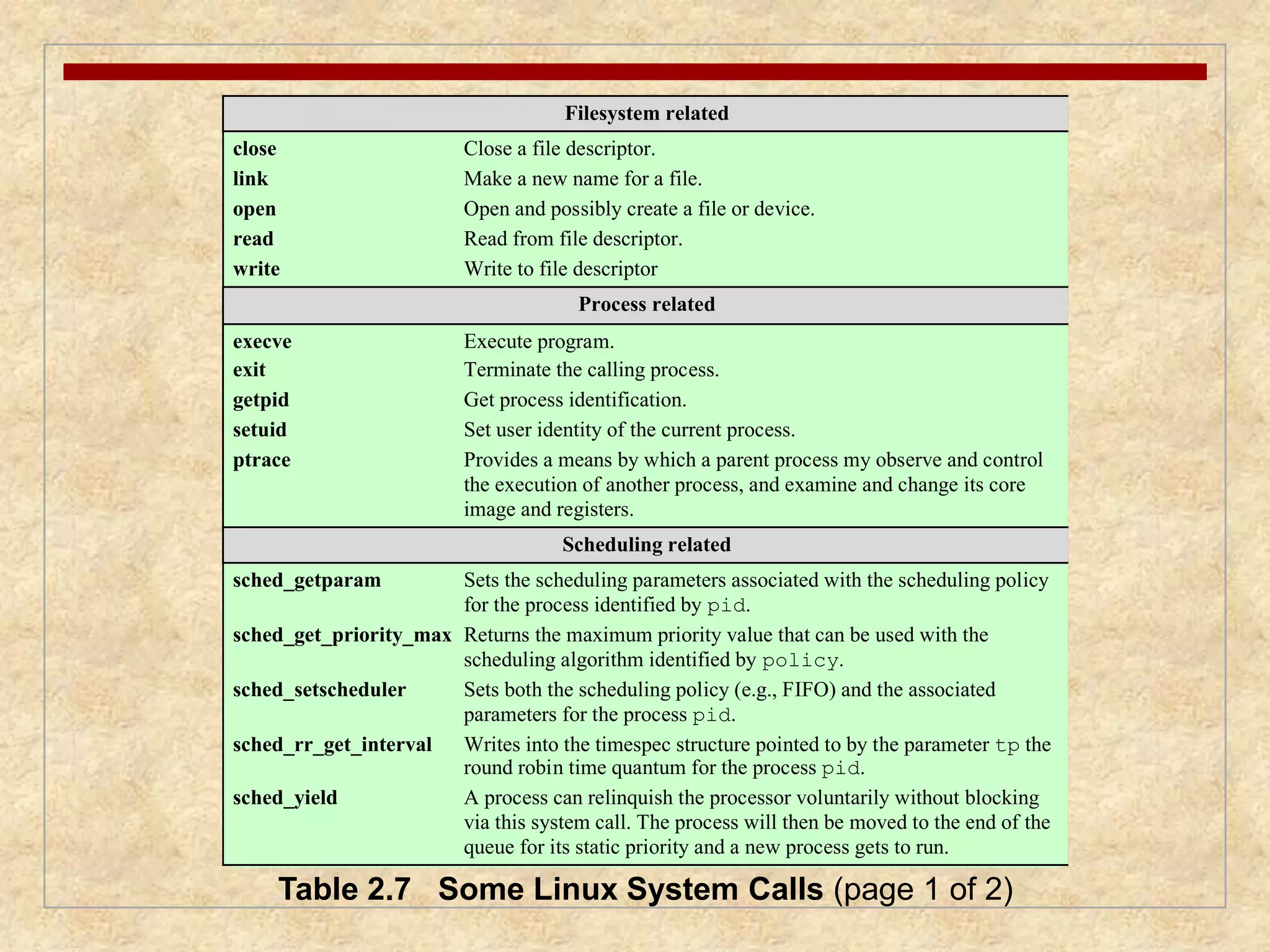
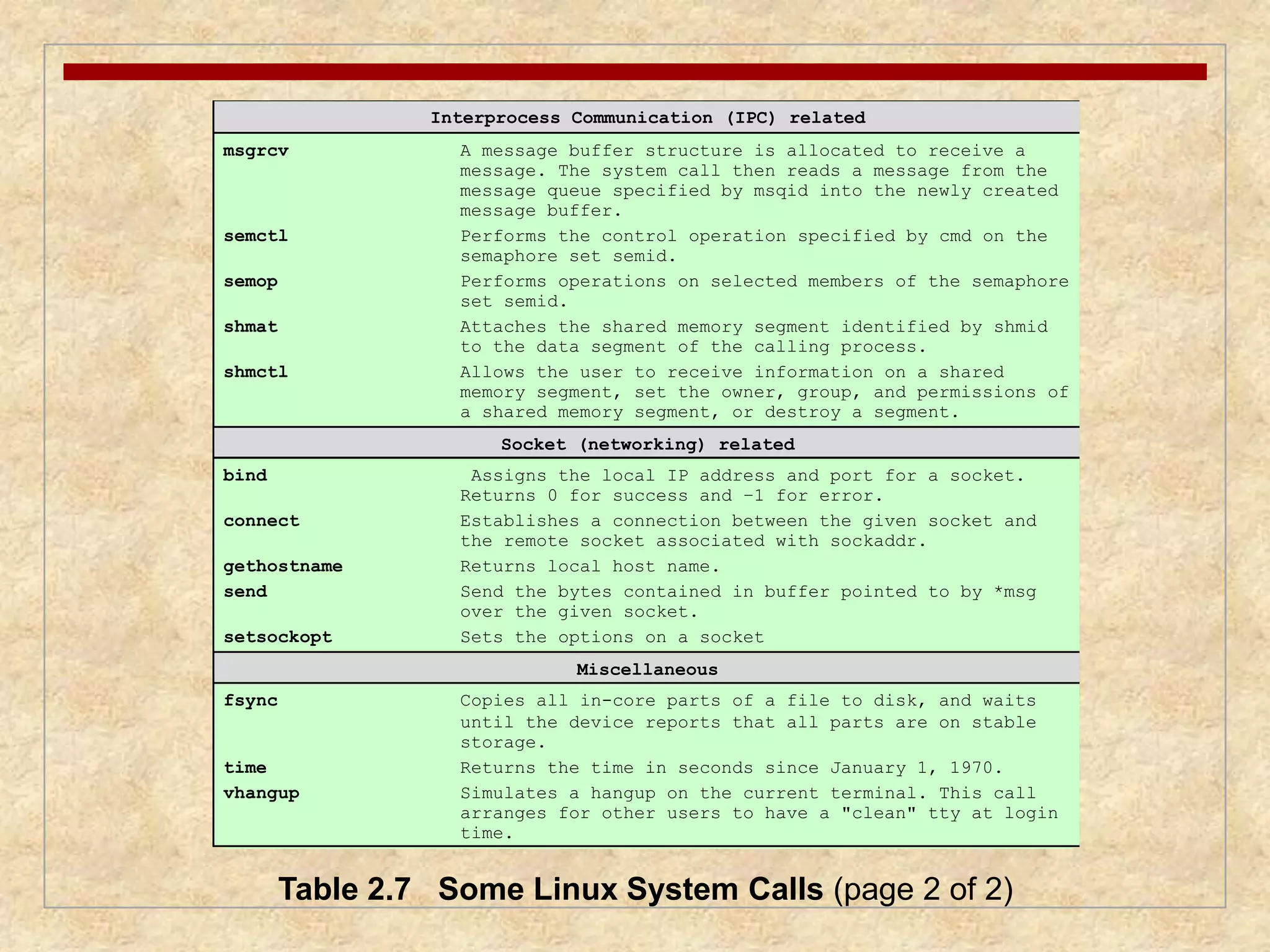
Lists and describes several key Linux system calls related to processes and IPC.
Explains IPC mechanisms available in Linux for process interaction.
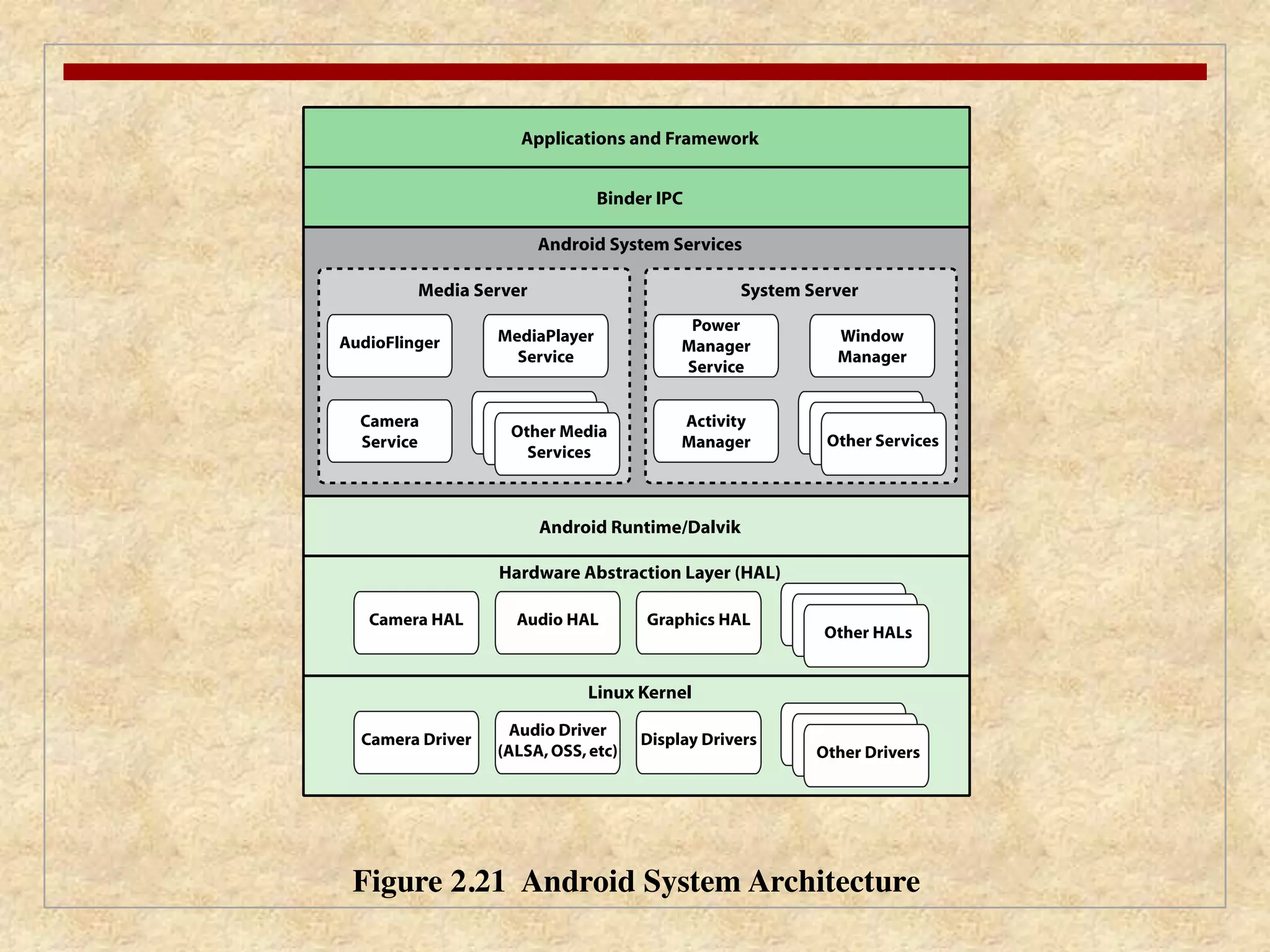
Introduces Android as a Linux-based mobile OS and its key developments.
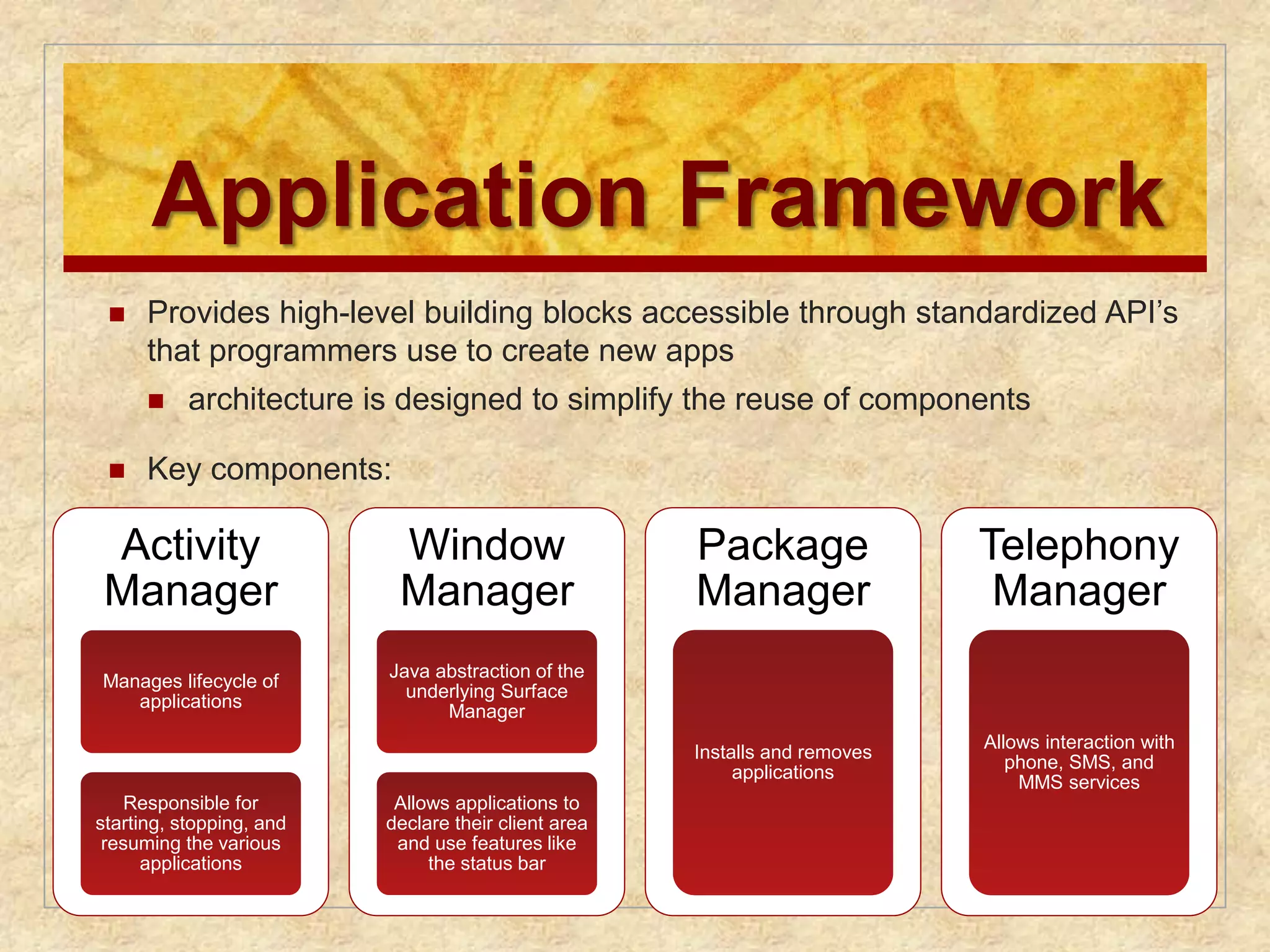
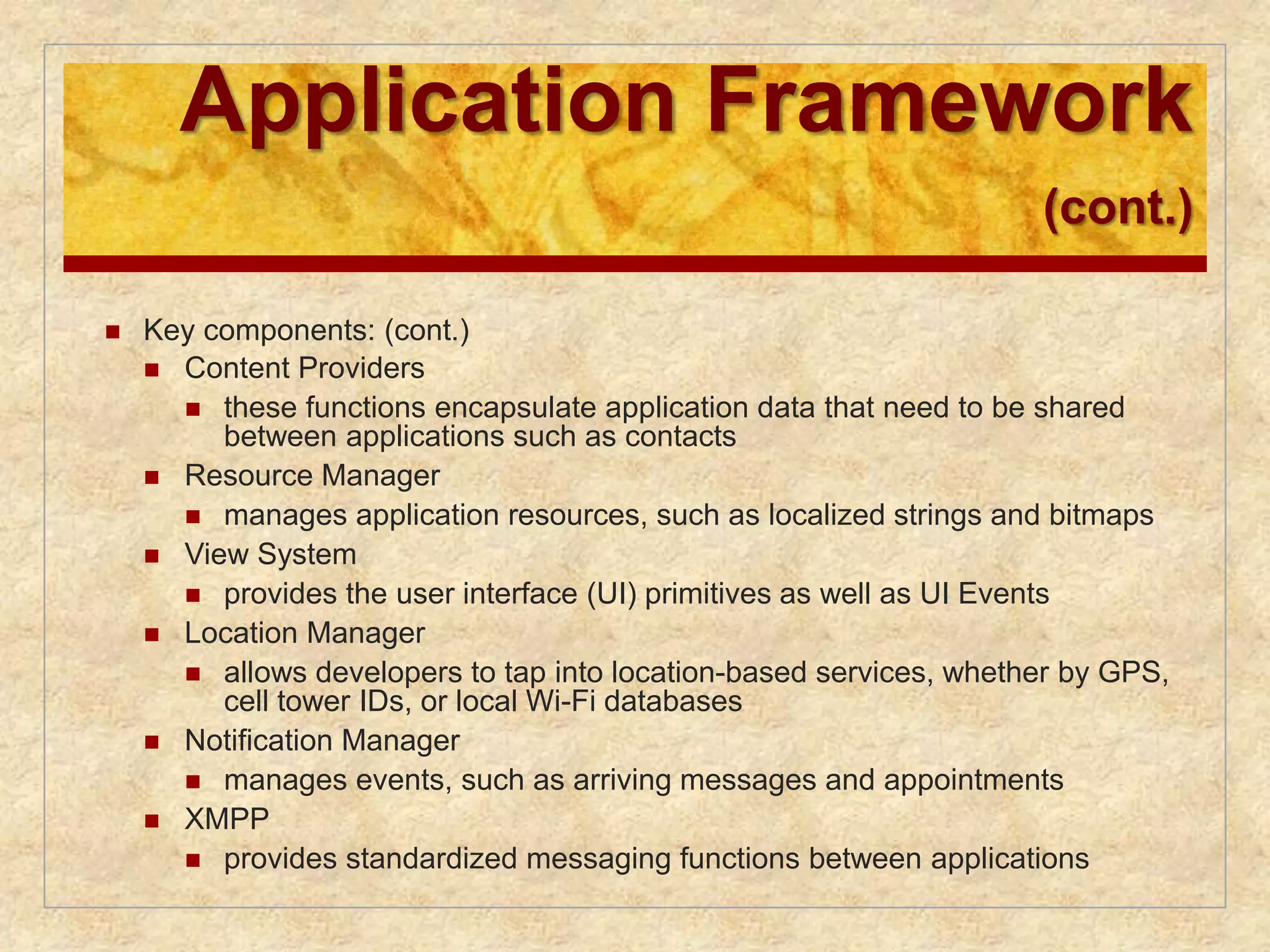
Describes key components of the Android application framework for developers.
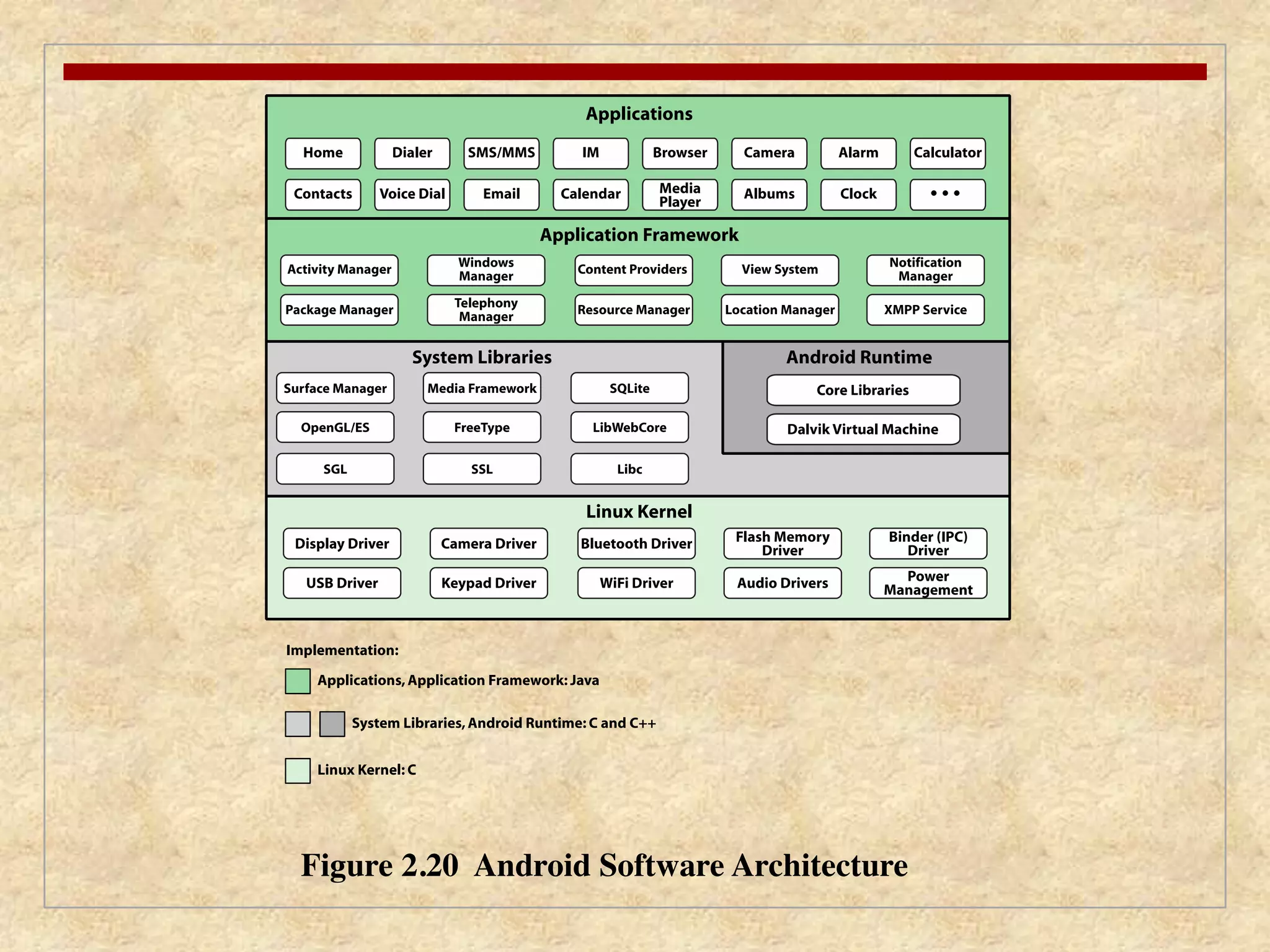
Details important system libraries utilized within Android's architecture.
Explains Android application execution within its own process and the Dalvik VM.
Defines an activity in Android as the component for user interface interactions.
Discusses power management features in Android, like alarms and wakelocks.
Summarizes key operating system concepts discussed throughout the presentation.



























































![OperatingSystem_UNIT_1_Introduction[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/osunit1introduction1-250820120255-fd2eb8b9-thumbnail.jpg?width=640&height=640&fit=bounds)






















