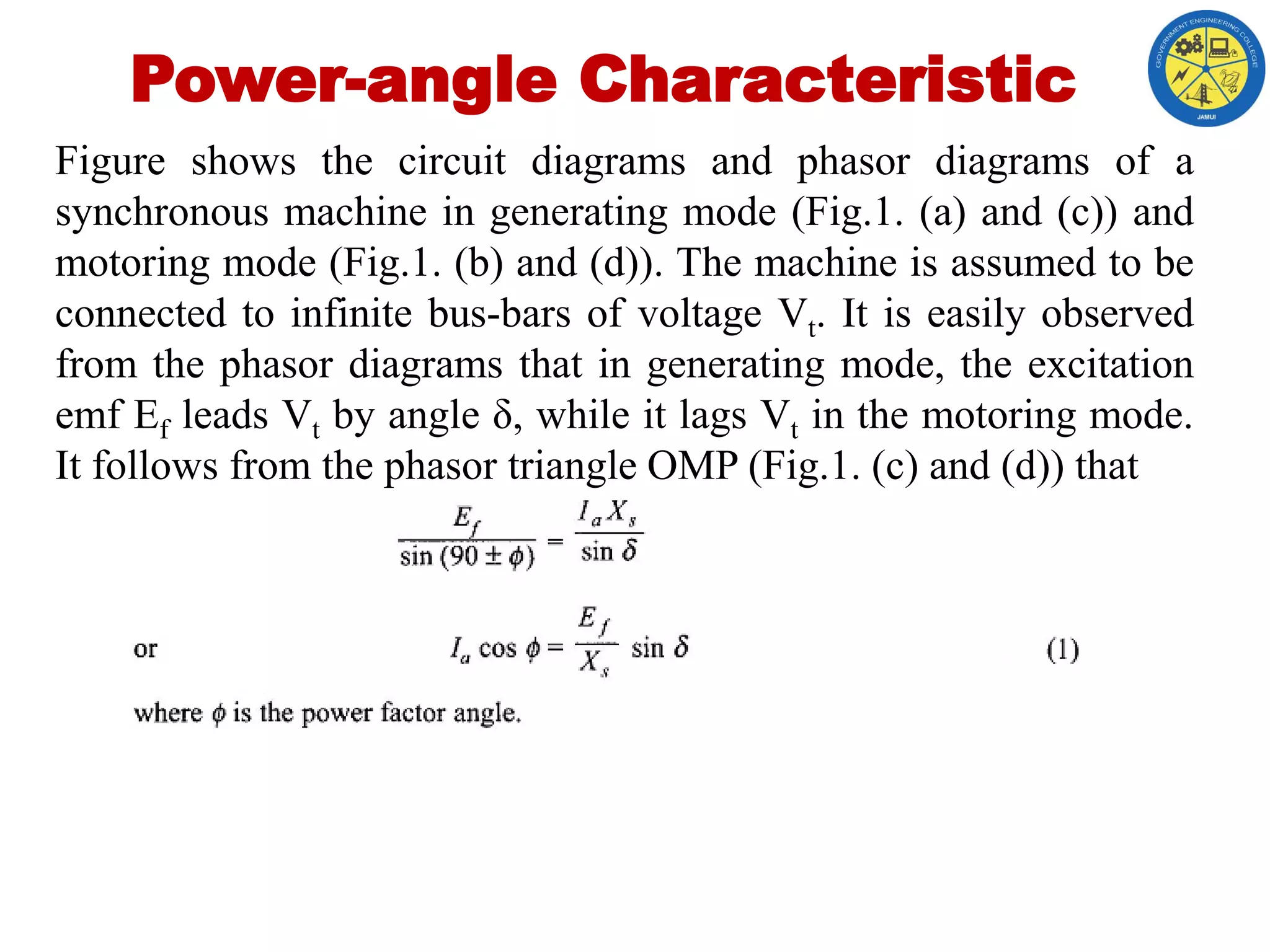
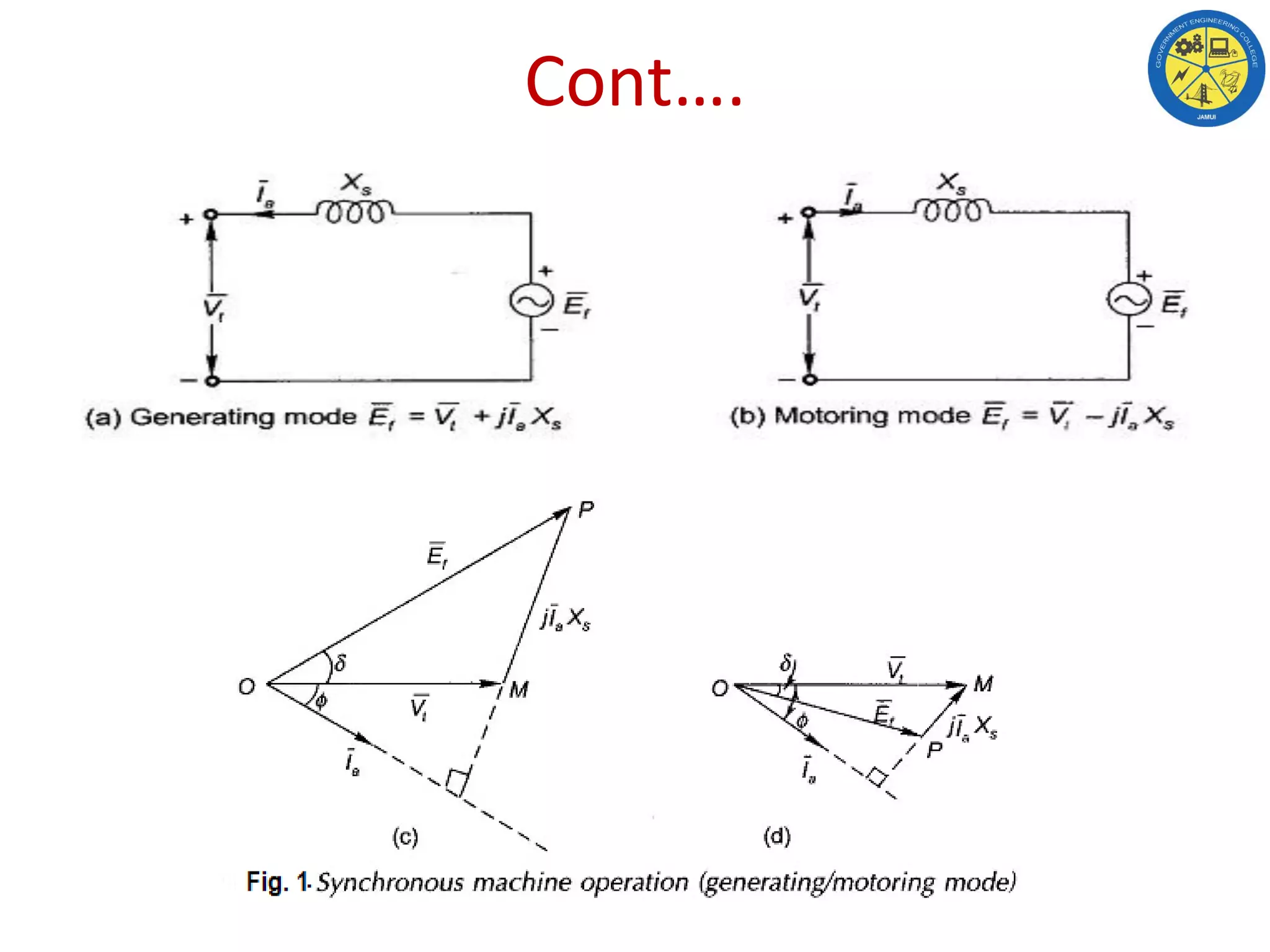
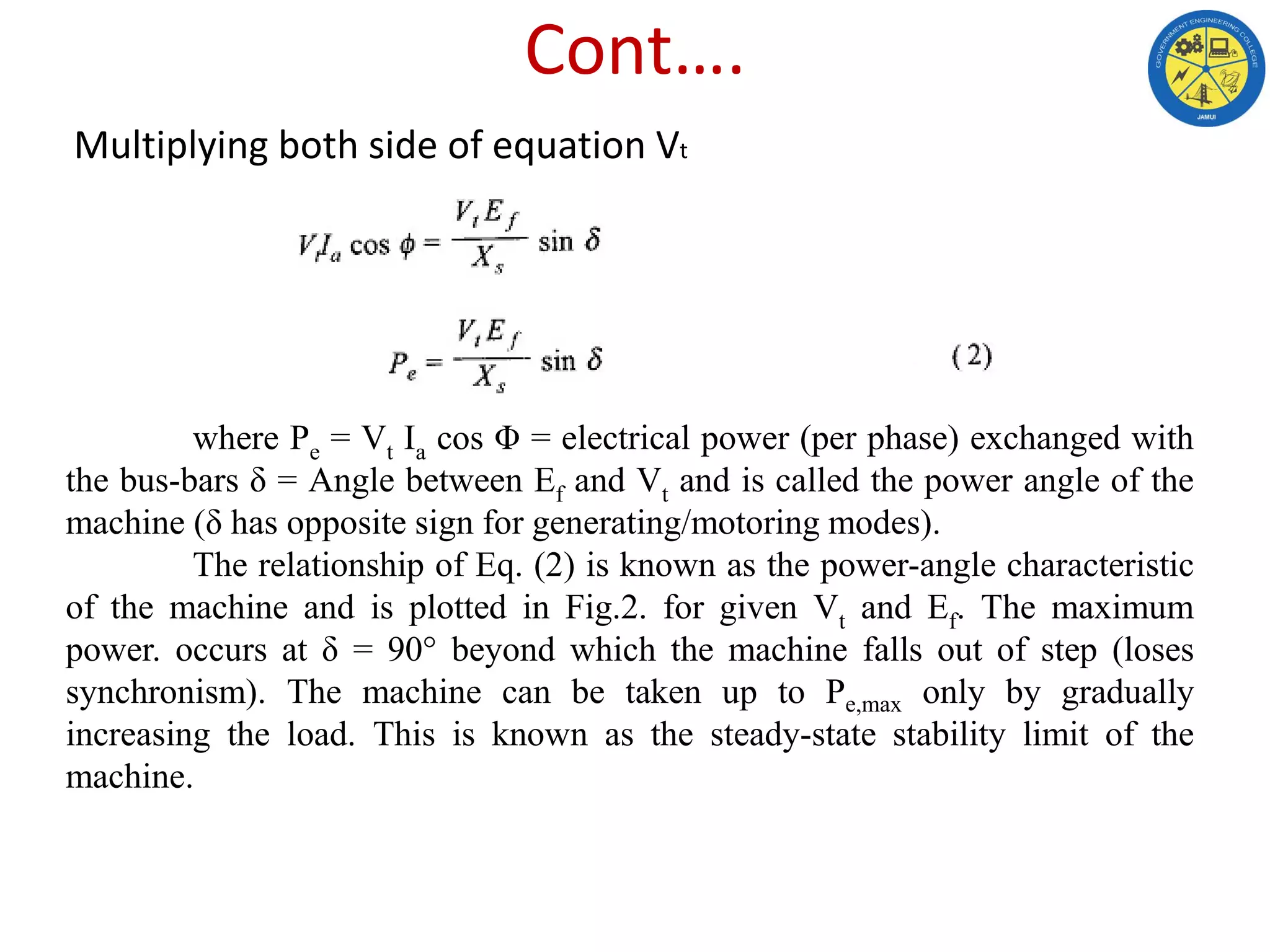
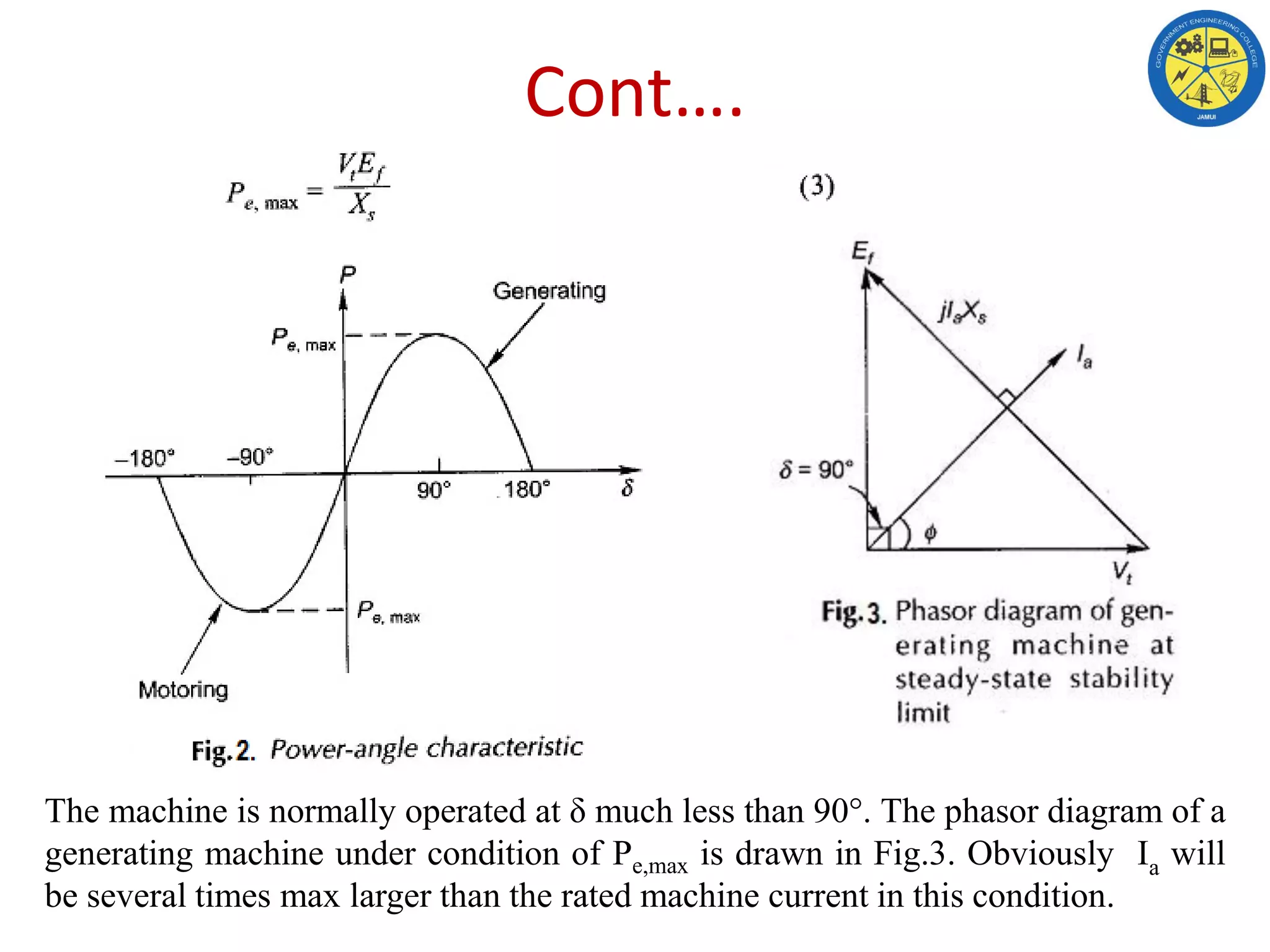
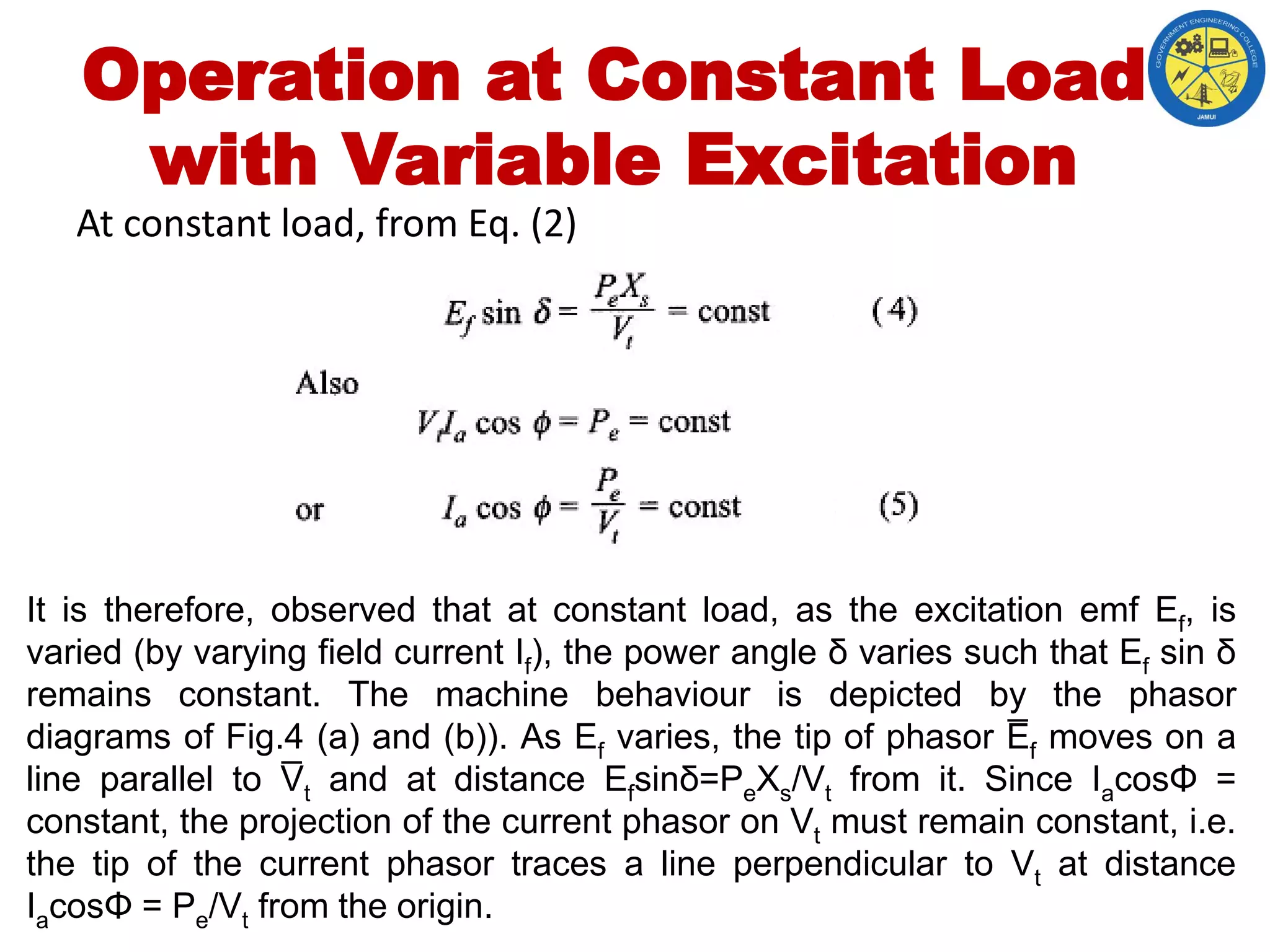
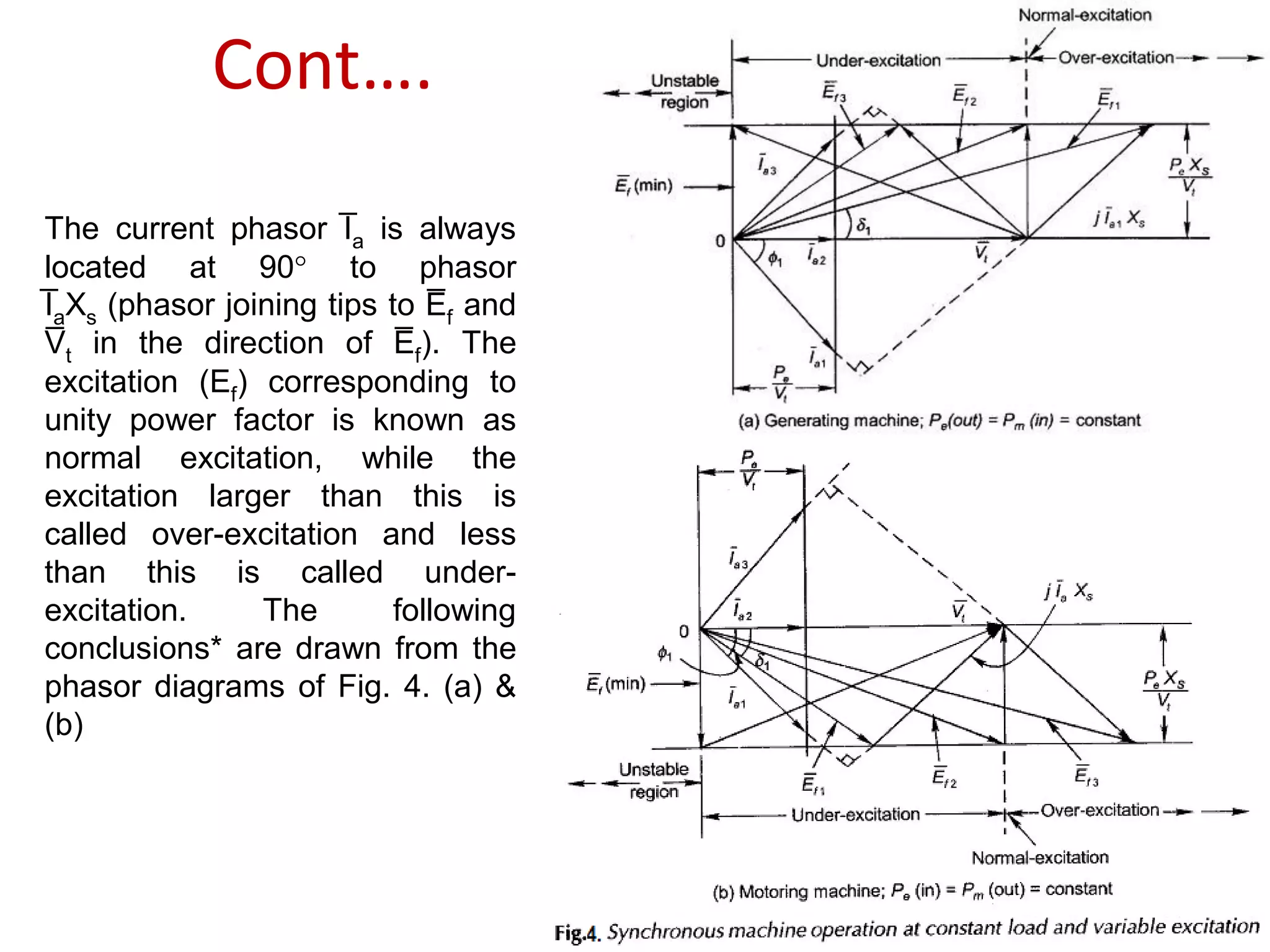
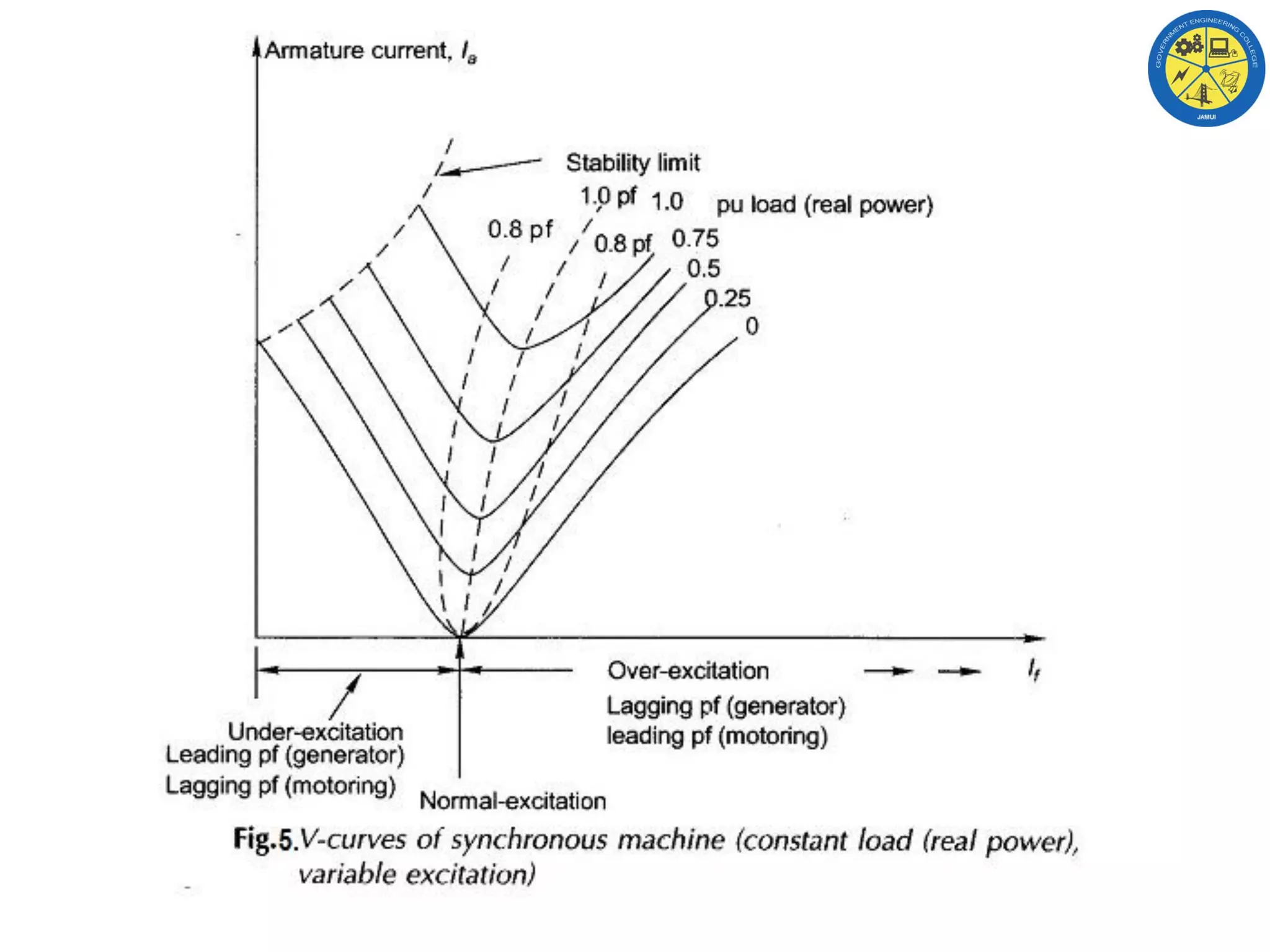
This document discusses the operating characteristics of synchronous machines under conditions of variable load and excitation. It examines the power-angle characteristic and phasor diagrams of synchronous machines in generating and motoring modes. The machine behavior is analyzed at constant load with variable excitation, showing that the power angle varies to keep real power constant as excitation changes. Minimum excitation is defined as the stability limit where the power angle reaches 90 degrees. In summary, real power depends on mechanical input while excitation controls only power factor in a synchronous machine.