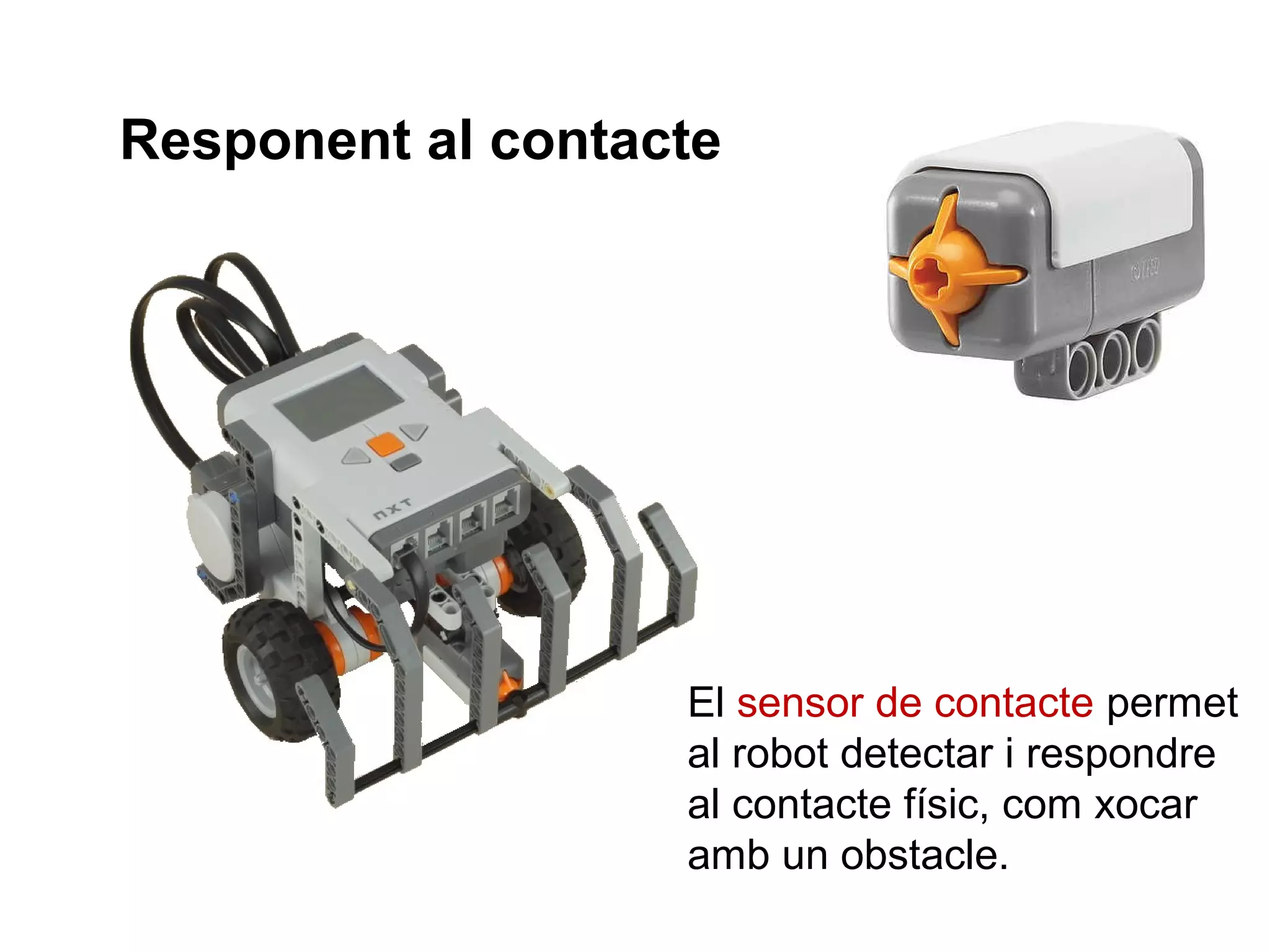
Responent al contacte
Elsensor de contacte permet
al robot detectar i respondre
al contacte físic, com xocar
amb un obstacle.
2.
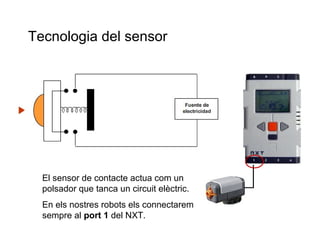
Tecnologia del sensor
Elsensor de contacte actua com un
polsador que tanca un circuit elèctric.
En els nostres robots els connectarem
sempre al port 1 del NXT.
3.
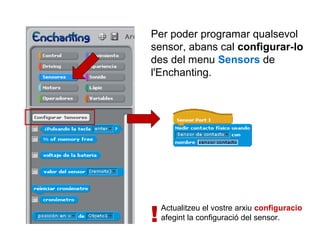
Per poder programarqualsevol
sensor, abans cal configurar-lo
des del menu Sensors de
l'Enchanting.
!
Actualitzeu el vostre arxiu configuracio
afegint la configuració del sensor.
4.
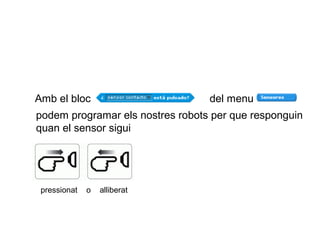
Amb el bloc
delmenu
podem programar els nostres robots per que responguin
quan el sensor sigui
pressionat
o
alliberat
5.
Comprovem el funcionament
delsensor de contacte: Emissor Morse
Es tracta que el NXT emeti un so cada cop que el sensor de contacte
sigui premut.
6.
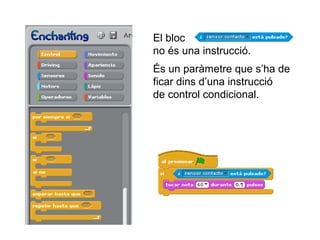
El bloc
no ésuna instrucció.
És un paràmetre que s’ha de
ficar dins d’una instrucció
de control condicional.
7.
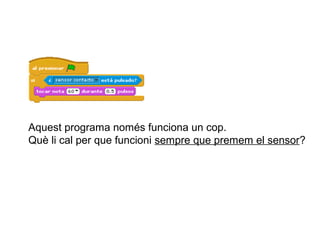
Aquest programa nomésfunciona un cop.
Què li cal per que funcioni sempre que premem el sensor?
8.
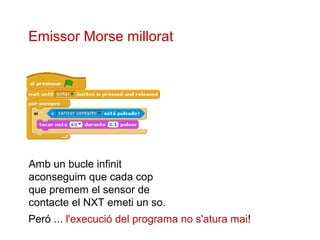
Emissor Morse millorat
Ambun bucle infinit
aconseguim que cada cop
que premem el sensor de
contacte el NXT emeti un so.
Peró ... l'execució del programa no s'atura mai!
9.
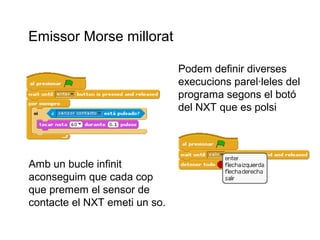
Emissor Morse millorat
Podemdefinir diverses
execucions parel·leles del
programa segons el botó
del NXT que es polsi
Amb un bucle infinit
aconseguim que cada cop
que premem el sensor de
contacte el NXT emeti un so.
10.
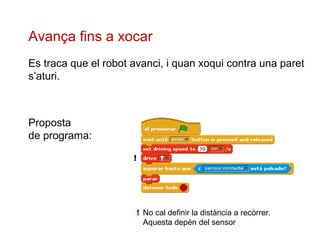
Avança fins axocar
Es traca que el robot avanci, i quan xoqui contra una paret
s’aturi.
Proposta
de programa:
!
! No cal definir la distància a recòrrer.
Aquesta depén del sensor
11.
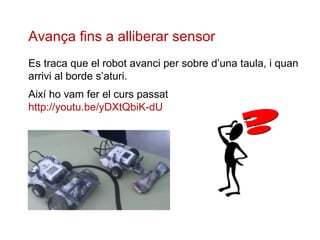
Avança fins aalliberar sensor
Es traca que el robot avanci per sobre d’una taula, i quan
arrivi al borde s’aturi.
Així ho vam fer el curs passat
http://youtu.be/yDXtQbiK-dU
12.
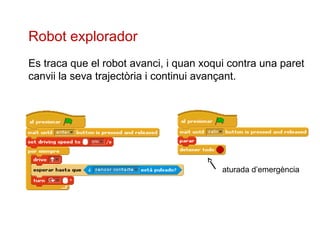
Robot explorador
Es tracaque el robot avanci, i quan xoqui contra una paret
canvii la seva trajectòria i continui avançant.
aturada d’emergència
13.
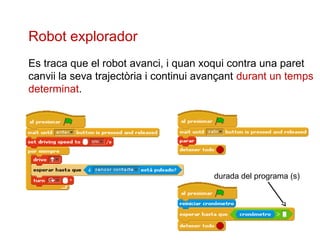
Robot explorador
Es tracaque el robot avanci, i quan xoqui contra una paret
canvii la seva trajectòria i continui avançant durant un temps
determinat.
durada del programa (s)