Bricxcc Robot LegoMindstorm NXT Per: Dan Gibert 2n Batxillerat A IES Forat del Vent
2.
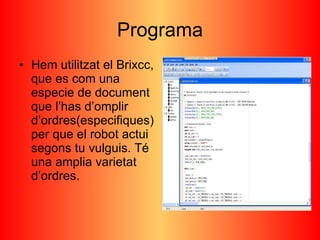
Programa Hem utilitzatel Brixcc, que es com una especie de document que l’has d’omplir d’ordres(especifiques) per que el robot actui segons tu vulguis. Té una amplia varietat d’ordres.
3.
Lego Mindstorm NXTAquest es el model del robot que hem utilitzat. Facil i senzill d’utilitzar, gracies a aquest robot hem pogut realitzar les practiques(fetes amb brixcc) i comprobar si funcionen bé. Mes info a www.lego.es
4.
Tipus d’ordres Aquestes ordres s’escriuen de diferent color dins el programa ja que unes són instruccions propies del programa i altres són més generiques(serveixen per altres programes). -task main -OnFwd -OnRev -#define -while -if -SetSensor -else
5.
Task main iOnFwd Task main serveix per indicar al robot la tasca principal que ha de fer. OnFwd serveix per anar recte o girar, combinant-lo es poden fer multiples accions Per exemple: task main(){ OnFwd (OUT_AC, 75); // recte amb Potencia de 75 }
6.
Define Define serveixper definir (introduir) variables. Per exemple: #define PW 75 // constant que serveix per regular la potencia dels motors
7.
While, if ielse Mentre que(while) esta fent una orde “x”, si(if) pasa algo, fa una ordre “y”, en cas contrari (else) fa una ordre “z”. Per exemple: #define MOVE_TIME 500 #define TURN_TIME 360 task main() { while(true) //mentre va { OnFwd(OUT_AC, 75); //endevant Wait(MOVE_TIME); if (Random() >= 0) // si s’activa random { OnRev(OUT_C, 75); //gira dreta } else //en cas contrari { OnRev(OUT_A, 75); //gira esquerra } Wait(TURN_TIME); } }
8.
Tipus de sensorsExemples: - sensor so : detecta entre 0 i 100 task main() { SetSensorSound(IN_2); //activa el sensor de so OnFwd(OUT_A, 25); //recte until (SENSOR_2 > 50); //mentre sensor es mes gran que 50 Off(OUT_A); //s’apaga motors } - sensor llum : detecta entre 0 i 100 task main() { SetSensorLight(IN_3); //activa el sensor llum OnFwd(OUT_AC, 25); //recte } - sensor tacte : detecta 0 o 1 task main() { SetSensor(IN_1, SENSOR_TOUCH); // activa sensor tacte OnFwd(OUT_AC, 25); //recte until(SENSOR_1 ==1); //mentre sensor de tacte esta pulsat(1) Off(OUT_AC); //s’apaga } - sensor ultrasons : detecta entre 0 i 255cm task main() { SetSensorLowspeed(IN_4); //activa sensor ultrasons OnFwd(OUT_A, 25); //recte until (SensorUS (IN_4) < 15); // mentre el que detecta el sensor es mes petit que 15cm Off(OUT_A); //s’apaga }