Ésel conjuntde coneixements que
permeten dissenyar, realitzar i
controlar equips basats en estructures
mecàniques poliarticulades, amb
certa capacitat d’aprenentatge.
4.
Són braços articulats amb diferents
possibilitats de moviment de caràcter
seqüencial.
http://www.youtube.com/watch?v=gIz
MJiPVYVo&feature=relmfu
5.
És l’evolució del manipulador per esdevenir un robot
industrial capaç de generar trajectòries complicades,
gràcies a la incorporació dels ordinadores per el control dels
seus moviments i optimització i amb el desenvolupament de
sensors i tècniques de programació avançades.
Estan destinats a la producció, a l’asistència i a l’exploració.
http://www.youtube.com/watch?NR=1&v=
evl78QQxr90&feature=endscreen
7.
Parell de revolució o articulació. Grau de llibertat: 1
Parell primsàtic o de guia-corredora. Grau de llibertat: 1
Parell cilíndric. Grau de llibertat: 2
Parell helecoïdal o de rosca. Grau de llibertat: 1
Parell esfèric o ròtula esfèrica. Grau de llibertat: 3
Parell pla. Grau de llibertat: 3
8.
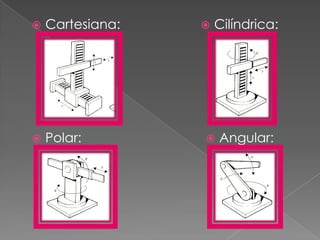
Cartesiana: L’element terminal es pot moure linealment en
tres eixos, gràcies a les tres guies corredores. Treballa en un
volum paral.lelepipèdic.
Cilíndrica: Substitueix el moviment lineal sobre la base d’un
moviment giratori, disposa d’una articulació i dues guies
corredores. Treballa en un volum cilíndric.
Polar: Té dos moviments giratoris i un lineal, amb un parell
d’articulacions i una guia corredora.
Angular: Té tres moviments giratoris, amb tres articulacions.
Un element terminal d’un robot és el que
interacciona amb l’element sobre el
que està realitzant una acció.
11.
Un tipus d’actuador és el:
Servomotor: Són motors que incorporen
una caixa reductora i un sistema de
control de posicionament digital.
http://www.youtube.com/watch?v=84m
xq41zdwE
12.
Sensors de posició: Informar a l’equip de control de quina és
la situació.
Detectors de presència: Permeten infroamr a l’equip de
control de la detecció d’un objecte en un punt determinat i
fins i tot saber-ne el tipus de material amb què està fet.
Detectors magnètics: Detecten objectes de metalls
ferromagnètics.
Detectors capacitius: Detecten els materials no metàl.lics.
13.
Un torn serveix per mecanitzar peces de
revolució.
http://www.youtube.com/watch?v=NXT
K0o_2u0w
14.
Una fresadora server per mecanitzar
peces d’altres formes.
http://www.youtube.com/watch?v=NXT
K0o_2u0w
15.
En el sistema de control hi ha dos tipus:
-Trajectòria punt a punt: El sistema de control només disposa de la
informació de les coordenades del punt inicial i del punt final.
-Trajectòria continua: El control ha d’aconseguir que la trajectòria seguida
passi per un conjunt de coordenades prèviament establertes pr tal de seguir
una determinada forma.
Tècniques bàsiques per la programació d’un robot:
-Programació per guiatge: Ensenyar al robot el camí i la seqüència
d’accions que ha de realitzar (manualment).
-Programació amb llenguatge a nivell de robot: Consisteix a definir la
següència de treball amb passos de programa en els que se li indica els
moviments que ha de fer i se li informa de l’entorn.
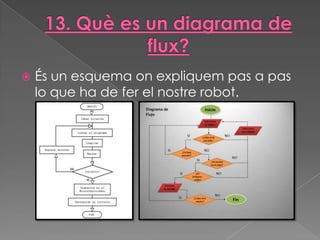
És un esquema on expliquem pas a pas
lo que ha de fer el nostre robot.
18.
És un equip electrònic programable amb
llenguatges específics i dissenyat per controlar
processos industrials. Per exemple el anomenat
Zelio:
19.
Els PIC són xips electrònics que incorporen un
processador, memòria, entrades i sortides, per
comunicar-se amb l’exterior i altres funcionalitats
molt interessants.