Quèés un robot?Unrobot és un sistema electromecànic i automàtic, capaç de manipular objectes, executaroperacions i moviments diversos, segons un programa que pot ser modificable o adaptable, i que potanarequipatambsensors per tal de detectar elssenyalsd’entrada i les condicionsambientals.
3.
La paraula “robot”va ser creada al 1920 per l’escriptorxecKarelCapekPartsd’un robotUn robot està constituït sempre per dues parts essencials:
4.
La part mecànicai la part electrònica. Aquestes dues parts es combinen entre si, per donar forma, estabilitat i control al producte final. ElectrònicaMecànica
5.
La mecànica delsrobotsÉs la part més important del robot, ja que aquesta en condiciona el funcionament, a part de ser-ne la seva estructura.
6.
És la partmés visible del robot, ja que en la majoria de casos, també té la funció de protegir als elements electrònics (sensors, microprocessadors...) La mecànica dels robotsPer altre banda, en la part mecànica podem trobar:
7.
Parts mòbils delrobot (braços articulats, rodes, motors, engranatges...)
8.
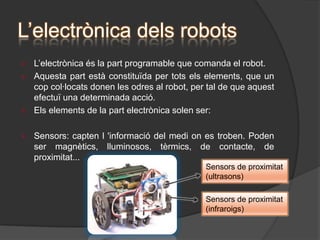
Eina de treball(si és necessària) L’electrònica dels robotsL’electrònica és la part programable que comanda el robot.Aquesta part està constituïda per tots els elements, que un cop col·locats donen les odres al robot, per tal de que aquest efectuï una determinada acció. Els elements de la part electrònica solen ser:Sensors: capten l 'informació del medi on es troben. Poden ser magnètics, lluminosos, tèrmics, de contacte, de proximitat...Sensors de proximitat (ultrasons)Sensors de proximitat (infraroigs)
9.
L’electrònica dels robots“Cervell”del robot: rep l' informació dels sensor i dóna una resposta. El “cervell” pot ser una controladora, o un microcontrolador, segons les característiques i exigències del circuit.Alimentació: sempre es necessita una font d’alimentació prou potent, per tal de que el robot efectuï correctament la seva tasca.
10.
Origen dels robotsUndels primers autòmats, va ser desenvolupat al 1912, per l’enginyer espanyol Leonardo Torres Quevedo. Es tractava d’un autòmat capaç de jugar a escacs i, pel seu funcionament, el resultat va ser un èxit rotund.Evolució dels robotsDes del 1801, els humans estem perfeccionant i creant noves màquines, capaces de realitzar tasques, que al principi semblaven impossibles.
11.
Tot i queel desenvolupament dels robots va començar al 1801, amb l’invent d’un teler programable, no va ser fins al 1900, que es van començar a inventar les màquines més sofisticades.
12.
Evolució dels robots1946:L’inventor americà G.CDevol desenvolupa un dispositiu controlador que podia registrar senyals elèctriques per mitjà dels camps magnètics, i reproduir-los per accionar una premsa.
13.
1952: Una màquinaprototip de control numèric va ser desenvolupada a l’ Institut Tecnològic de Massachusetts.Evolució dels robots1959: S’introdueix al mercat el primer robot comercial, realitzat per Planet Corporation. Estava controlat per finals de cursa.
14.
1961: El primerrobot industrial s'instal·la a la Ford Motors Company
15.
1966: Trallfa, unaempresa noruega, construeix i instal·la un robot capaç de pintar amb esprai.
16.
Evolució dels robots1980:El primer robot capaç d’agafar peces de qualsevol lloc, va ser creat per l’Universitat de RhodeIsland.
17.
1968: Un robotmòbil anomenat “Shakey’’ es desenvolupa a l’SRI (StandfordResearchInstitute). Estava equipat amb una gran diversitat de sensors, i una càmera.
18.
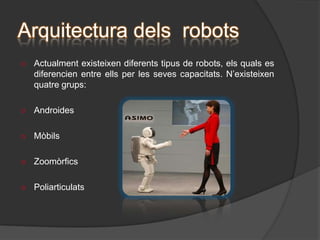
1971: StandfordUniversity, desenvolupael primer braç robot per accionament elèctric.Arquitectura dels robotsActualment existeixen diferents tipus de robots, els quals es diferencien entre ells per les seves capacitats. N’existeixen quatre grups:
PoliarticulatsArquitectura dels robotsRobots ANDROIDES:Són robots de forma humana, que intenten imitar el movimentsd’una persona. Actualmentperò, encara estem mol llunyd’imitar en la seva totalitat els moviments del cos humà.
23.
Arquitectura dels robotsRobots MÒBILS Són robots que es desplacen sobre rodes o per plataformes mòbils. Són el tipus de robot més corrent. No tenen una utilitat definida, tot i que alguns s’utilitzen per al transport de peces.
24.
Arquitectura dels robotsRobots ZOOMÒRFICSSónrobots que intenten reproduir els moviments dels animals. La finalitat d’aquests robots és diversa, es poden utilitzar per a l' investigació del fons marí, o per estudiar altres habitats naturals. http://www.youtube.com/watch?v=eO9oseiCTdk
25.
Arquitectura dels robotsRobots POLIARTICULATS Són robots normalment formats per un braç articulat, el qual els permet manipular i agafar objectes, cosa per la qual, aquests robots són els més utilitzats a la indústria.
26.
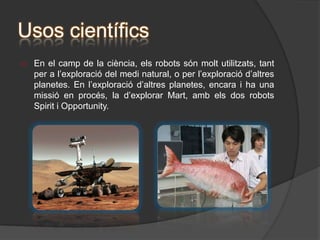
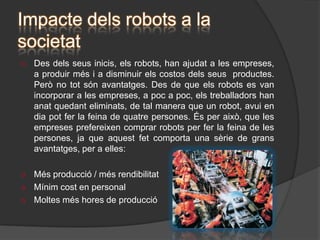
Usos dels robotsActualmentels robots, s’utilitzen gairebé en totes les empreses de producció, ja que els robots ofereixen una gran productivitat i rendibilitat. A mésperòels robots tenenaltresaplicacions: