La tecnologia decontrol abasta tots els procediments i dispositius que permeten automatitzar les màquines i els processos. Automatitzar vol dir reduir la intervenció humana en el desenvolupament d'un procés.
3.
La robòtica és una branca de la tecnologia, que estudia el disseny i construcció de màquines capaces d'exercir tasques repetitives, tasques en les quals es necessita una alta precisió, tasques perilloses per a l'ésser humà o tasques irrealitzables sense intervenció d'una màquina. Les ciències i tecnologies de les que deriva són: l'àlgebra, els autòmats programables, les màquines d'estats, la mecànica, l'electrònica i la informàtica.
4.
Lleis de larobòtica (Isaac Asimov): 1. Un robot no pot fer mal a un ésser humà o, per inacció, permetre que un ésser humà prengui mal. 2. Un robot ha d'obeir les ordres dels éssers humans, excepte si entren en conflicte amb la primera llei. 3. Un robot ha de protegir la seva pròpia existència en la mesura que aquesta protecció no entri en conflicte amb la primera o la segona llei.
5.
Algunes pel·lícules sobrerobots: -Terminator -La guerra de las galaxias -Wall-e -Yo, robot -etc,etc.
6.
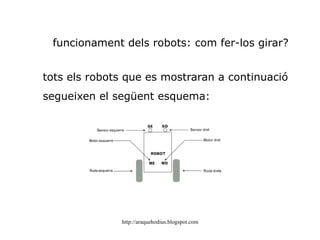
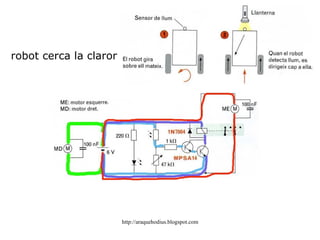
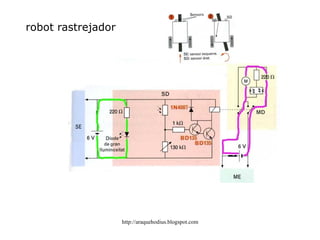
Un robot capta informació del seu entorn, i en funció de les dades que rep, ha d'efectuar una acció com a resposta. Això també són robots:
7.
No cal teniruna forma humanoide, això també són robots (domèstics, en aquest cas):
Un sistema decontrol té com a objectiu aconseguir que una màquina o procés funcioni amb la mínima intervenció humana. Pot estar composat per diversos automatismes : elements més senzills que s'encarreguen de funcions més concretes.
sistema de controlde llaç obert: no avalua el valor de la variable que es tracta de controlar; és a dir, no tenen realimentació. Actuen bàsicament durant un temps prefixat. Exemples: el microones, el forn, la rentadora, el rentavaixelles, la programació d'un gravador de TV.
sistema de controlde llaç tancat: s'avalua constantment el valor de la variable controlada; és a dir, en aquests sistemes hi ha realimentació. S'actua sobre el sistema fins a obtenir el resultat desitjat (consigna, senyal de referència, punt d'ajust o punt de regulació) Exemple: termòstat, ompliment del dipòsit del lavabo
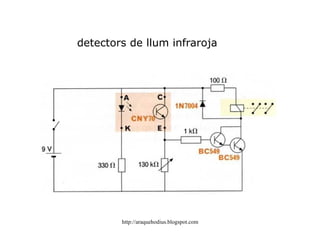
Senyal d'entrada :és el que es pren de l'exterior per mitjà d'un sensor. Alguns tipus de sensors són: LDR NTC final de cursa emissor i receptor d'infrarojos pressió, etc.
20.
senyal de referència,punt d'ajust , punt de regulació o consigna : és el valor que es compara amb el senyal d'entrada.
21.
comparador : ones fa la comparació entre el senyal de referència i el senyal d'entrada
22.
elements de controlo controlador : determina i executa el control del procés. Disposa dels elements següents: d'activació i desactivació dels dispositius externs
senyal de sortida: la que regula l'actuador actuador : és l'element final que fa una acció sobre el procés.
30.
variable controlada :recollida pels sensors sensors: dispositius que prenen dades de la situació del procés o de les variables de sortida i les transmeten al controlador
Els robots. Components. sistema mecànic baules rígides articulacions unions actuadors eina sistemes pneumàtics elèctrics hidràulics
39.
el moviment delsrobots articulacions prismàtiques giratòries moviment lineal en una direcció moviment de rotació
40.
el moviment delsrobots coordenades polars En la matemàtica, el sistema de coordenades polars és un sistema de coordenades de dues dimensions en el que cada punt en un pla està determinat per un angle i una distància. El sistema de coordenades polars és especialment útil quan la relació entre dos punts s'expressa més bé en termes d'angles i distàncies. En el sistema més conegut, el cartesià o de coordenades rectangulars, aquestes relacions cal trobar-les a partir de les funcions trigonomètriques.
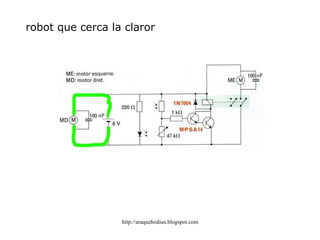
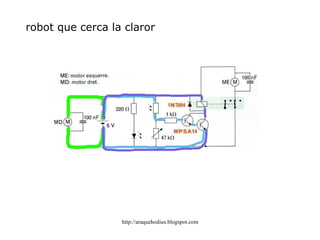
Alimentació:una tensió peral circuit de control i una altra més gran per al circuit de potència (motor) Això s'aconsegueix amb: dos piles (4,5 i 9 V respectivament)