Lego Mindstorm LegoMindstorm Lego Mindstorms és una línia de jocs d'experimentació centrats en la robòtica, de la casa Lego. Però les seves possibilitats en fan una eina apreciable en entorns didàctics des de l'escola primària a la universitat.El joc incideix en els aspectes de muntatge del robot, disseny en un ordinador PC del programa que haurà de seguir, descàrrega del programa al microcontrolador, i seguiment de l'execució del robot sobre una pista de paper o en lliure circulació. El software Lego Mindstorms NXT permet programar els robots NXT i descarregar els seus programes mitjançant un port USB o per connexió Bluetooth
2.
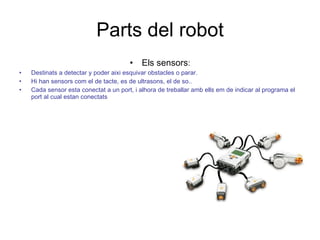
Parts del robotEls sensors : Destinats a detectar y poder aixi esquivar obstacles o parar. Hi han sensors com el de tacte, es de ultrasons, el de so.. Cada sensor esta conectat a un port, i alhora de treballar amb ells em de indicar al programa el port al cual estan conectats
3.
Sensor de tacteSensor de tacte. Al entrar en contacte amb un obstacle s’activa una altra variable la qual farà que se’n vagi cap enrere o giri o es pari.
4.
Sensor d’ultrasons Aquestsensor detecta proximitat davant del robot, programat amb variables un cop que ha detectat un obstacle tens l’opció de que giri, o vagi cap enrere i giri, que es pari, etc
5.
Sensor de soDetecta un so, al programa li indiques un determinat nombre de Hz i al detectar-ho el robot fa alguna activitat com: Parar, aumentar velocitat, girar, etc
6.
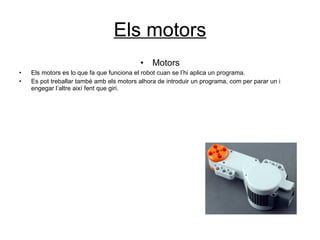
Els motors MotorsEls motors es lo que fa que funciona el robot cuan se l’hi aplica un programa. Es pot treballar també amb els motors alhora de introduir un programa, com per parar un i engegar l’altre així fent que giri.
7.
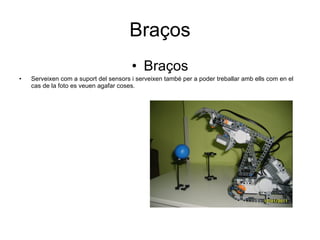
Braços Braços Serveixencom a suport del sensors i serveixen també per a poder treballar amb ells com en el cas de la foto es veuen agafar coses.
8.
Funció d’algunes deles seves variables 1. # define es para definir una variable como OnFwd(OUT_AC,75); 2 . SetSensor(SENSOR_1,SENSOR_TOUCH); per definir el sensor. Lo de SENSOR_1 es per a dir-li al robot en quin port esta conectat el sensor que es vol utilitçar 3. while(true ) per que repeteixi bucle infinit 4. if(SENSOR_1 == 1) si fa una cosa.. 5. else en cas contrari 6. Void Tasca concreta 7. task main () Per començar el programa 8. wait(x); lo hace en este tiempo *La companyía lego lo que fa es definir de diferents colors les difenernt variables per asi poder utilitçar el sistema :C
9.
Alguns programes variatsfets amb el NXT task main() { SetSensor(SENSOR_1,SENSOR_TOUCH); OnFwd(OUT_AC, 75); until(SENSOR_1 == 1); Off(OUT_AC); Wait(2000); OnFwd(OUT_A, 75); Wait(2000); OnFwd(OUT_AC, 75); Wait(200.); Off(OUT_AC); } .Si detecta el sensor de tacte que es pari
10.
#define PW 75//constant per regular la potencia del motor #define LLINDAR 40 //constant que equival a 40 cm pel detector d'ultrasons task main() { SetSensorLowspeed( IN_4 ); while( true ) / { if( SensorUS( IN_4 )>LLINDAR ) //si detecta un obstacle a mes de 40 OnFwd(OUT_AC, PW); else //en cas contrari OnRev(OUT_A, PW); } } Si detecta un objecte a 40 cm que vagi cap enrere en cas contrari que segueixi cap en davant