Download to read offline

![Theory
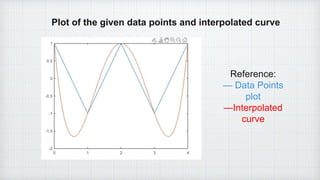
Then the process of knowing the value of f(x ) for some unknown
value of x not explicitly given in the interval [a, b] is called
interpolation. The value thus, determined is known as Interpolated
value.
This Newton Gregory Forward Interpolation formula is useful
when the value of f(x) is required near the end of the table. h is
called the interval of difference and u = ( x – an ) / h, Here an is
last term .
Error term of the formula:](https://image.slidesharecdn.com/20463986-230523150002-560e9506/85/Newton-Backward-Interpolation-3-320.jpg)
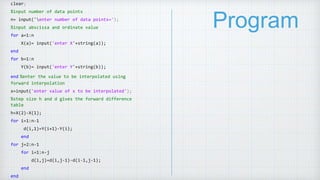
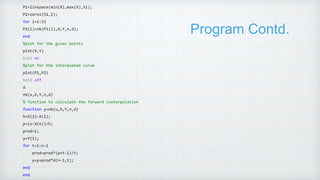
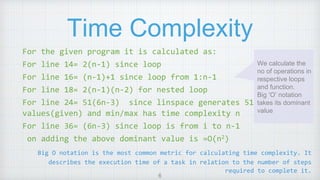


1. The document describes implementing Newton Gregory backward interpolation and least squares polynomial curve fitting in MATLAB. 2. It presents the theory of interpolation, the Newton Gregory backward interpolation formula, and the program steps to calculate backward interpolation for a given data set and plot the results. 3. The time complexity of the backward interpolation program is O(n^2) due to nested loops and other operations that are proportional to the number of data points.















































![[DSC Europe 25] Andrzej Kowalczyk - AI - how to start small and grow in the f...](https://cdn.slidesharecdn.com/ss_thumbnails/oy1zmo94qv6vpcqjvno2-andrzej-kowalczyk-ai-how-to-start-small-and-grow-in-the-future-1-260119121559-cf093b23-thumbnail.jpg?width=640&height=640&fit=bounds)

















