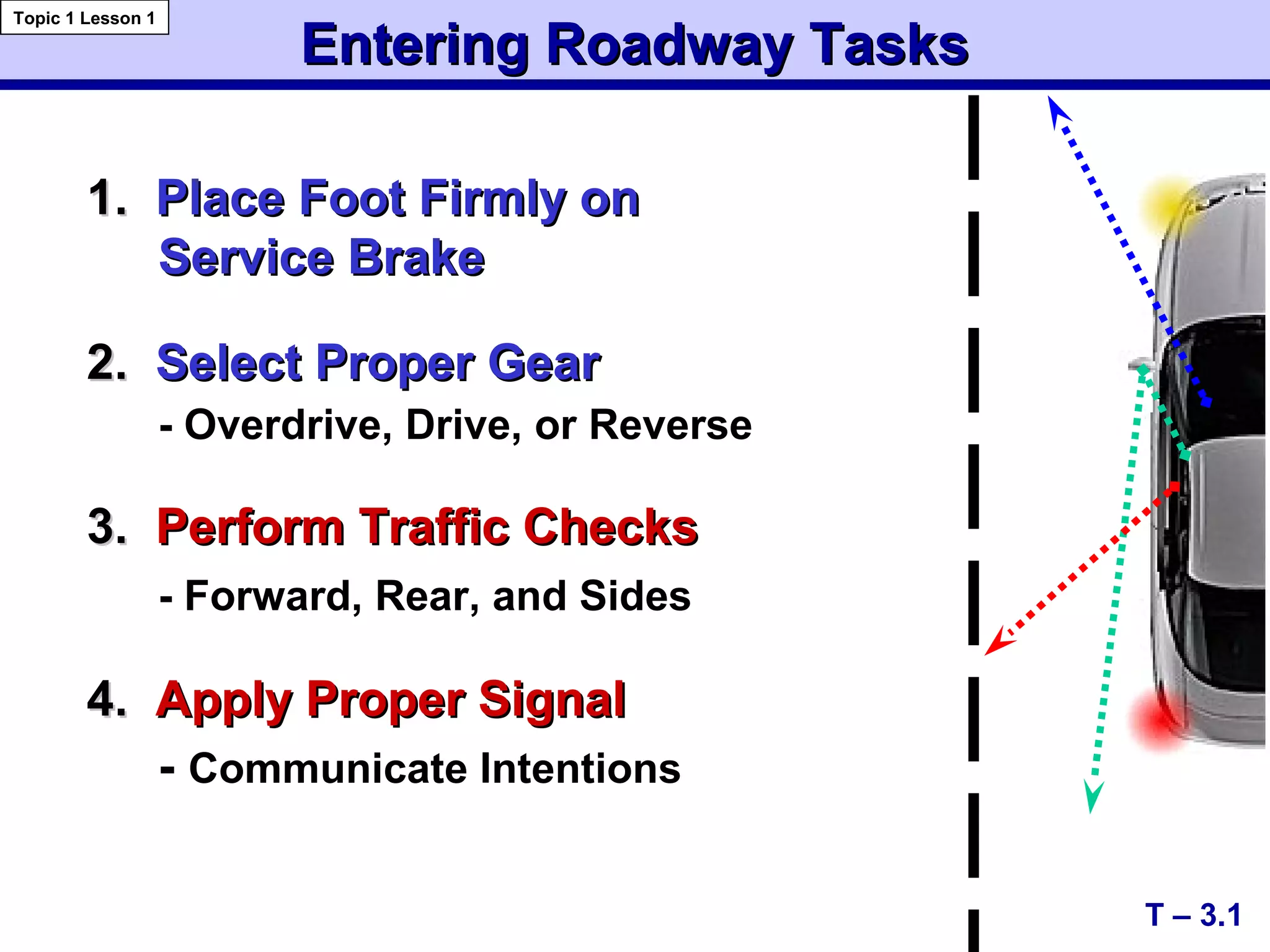
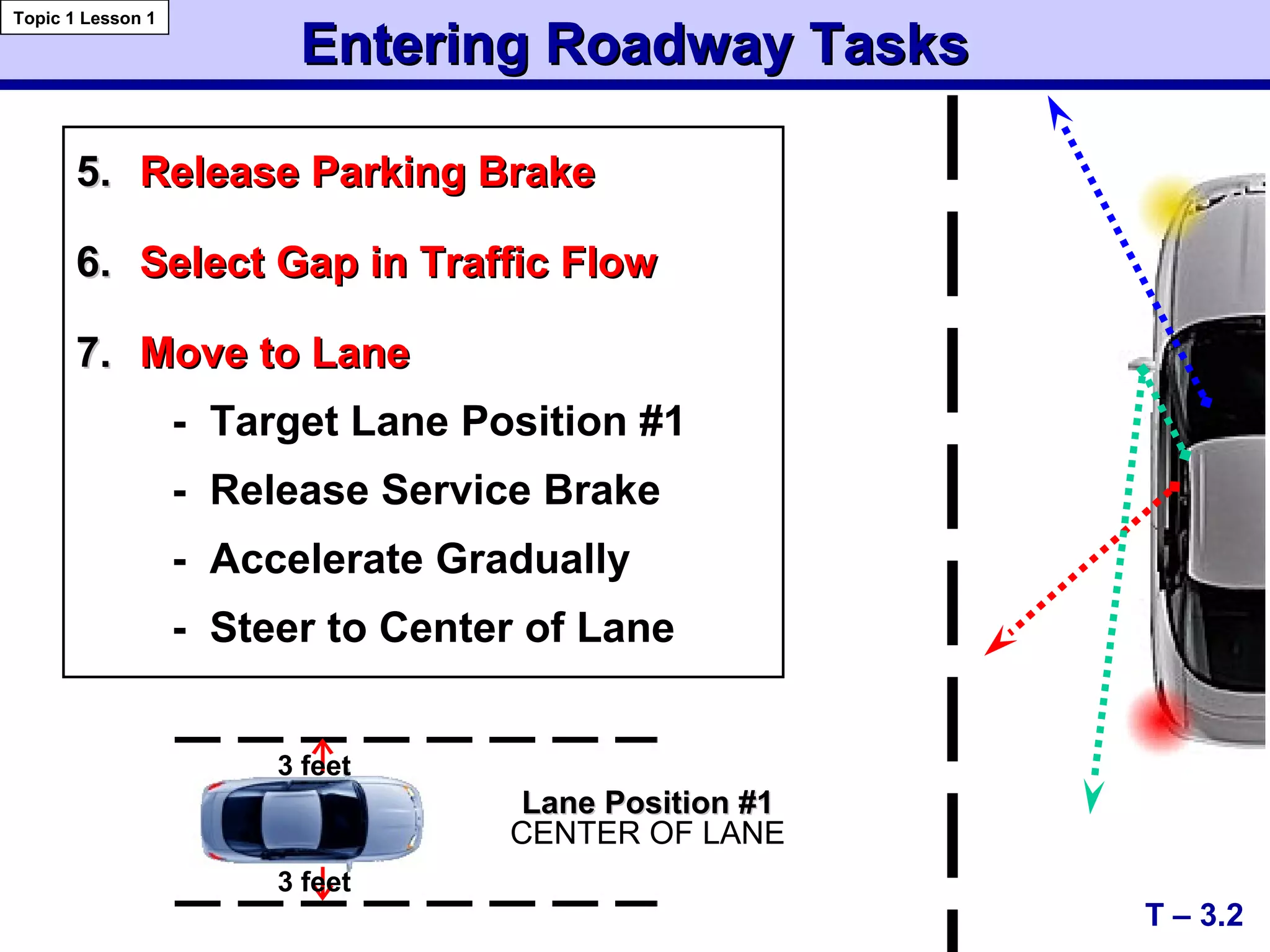
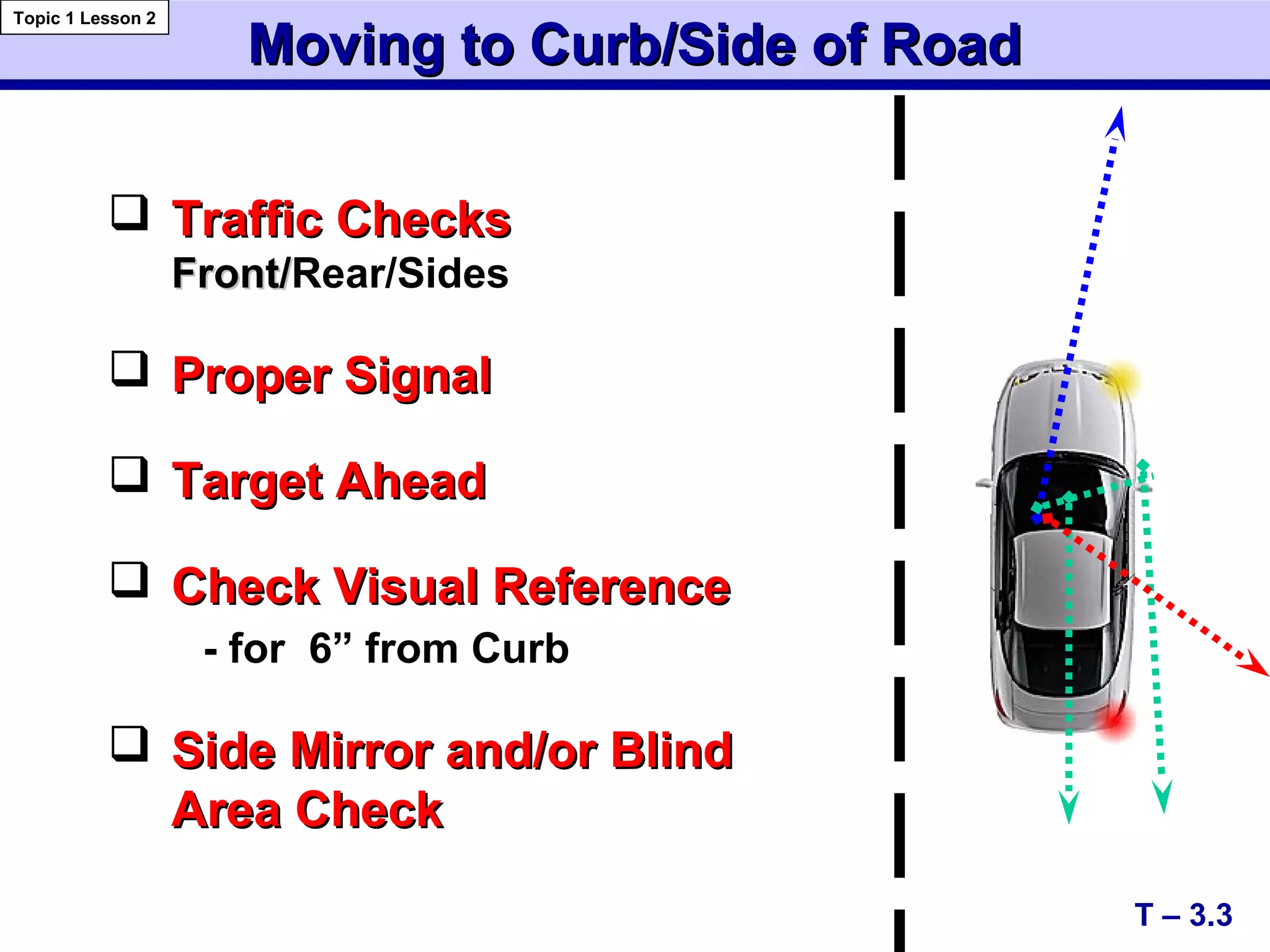
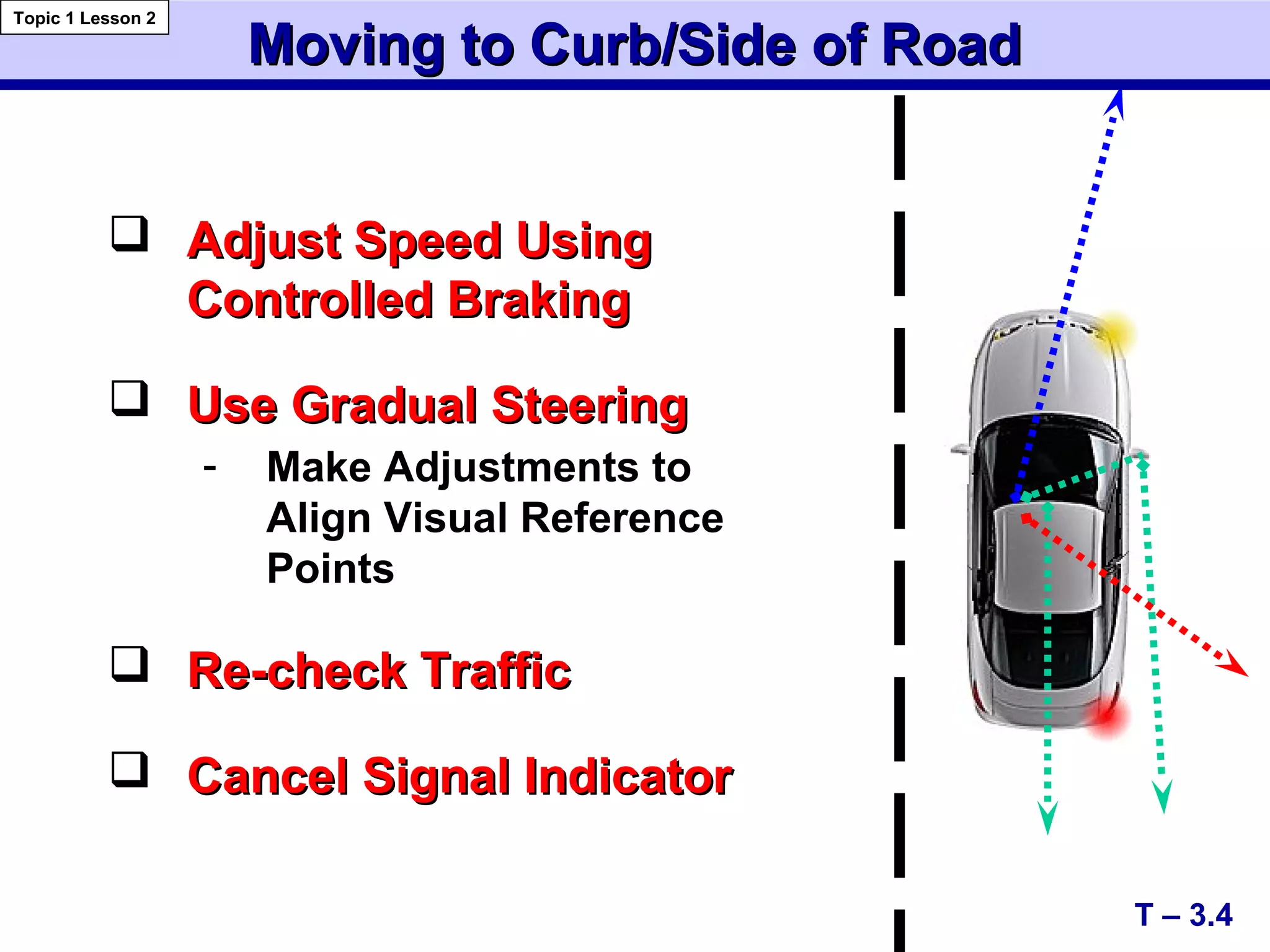
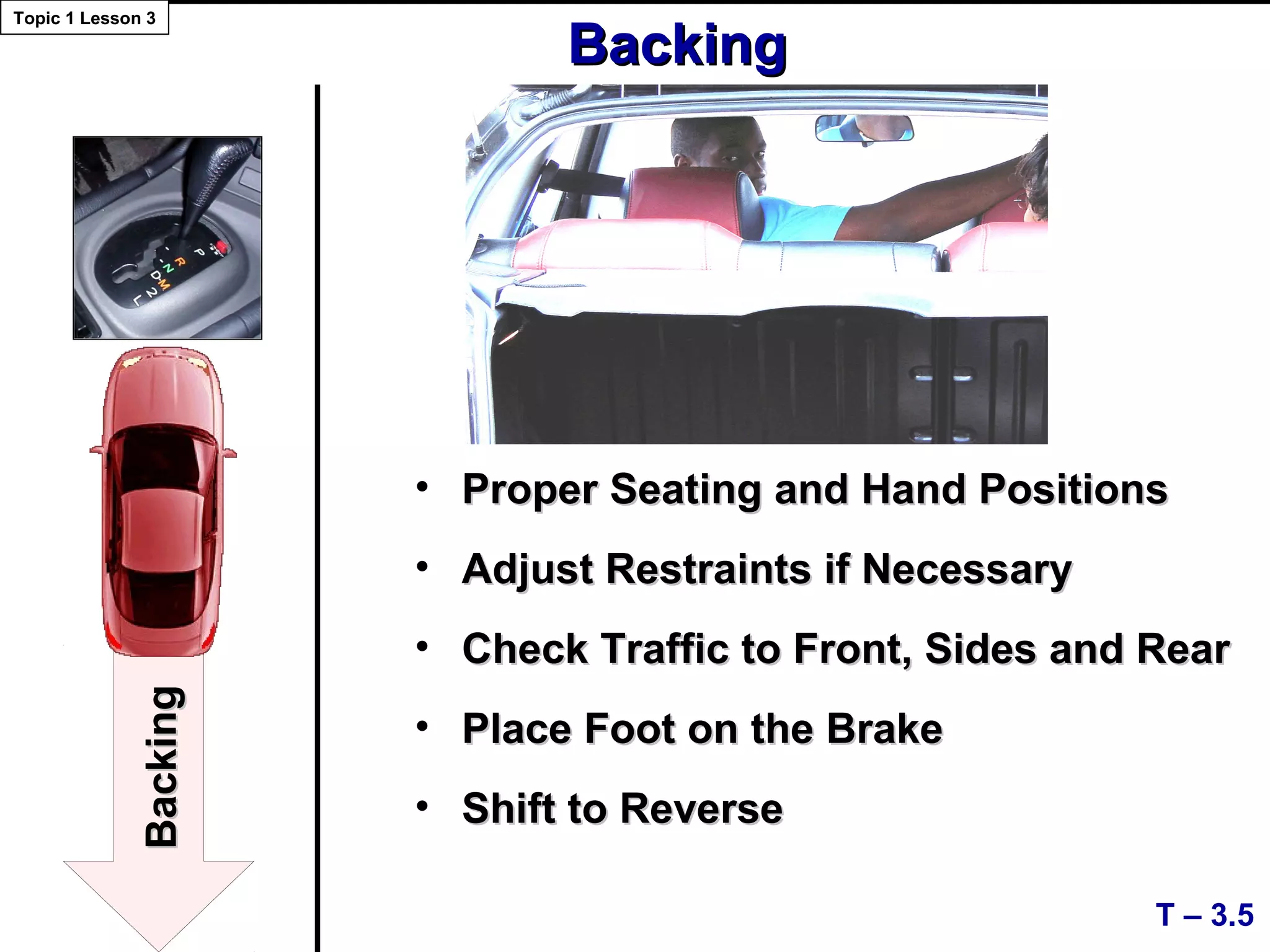
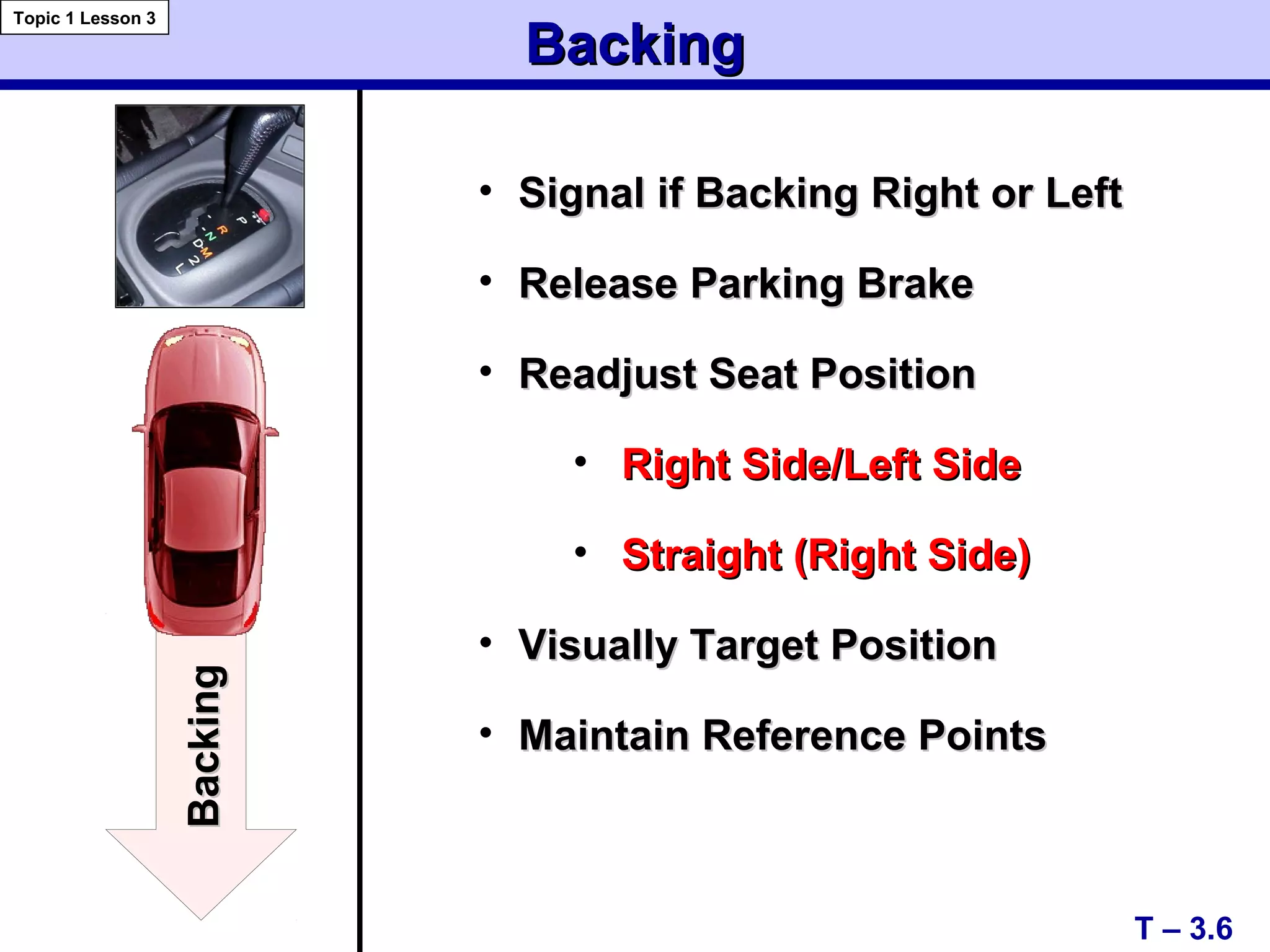
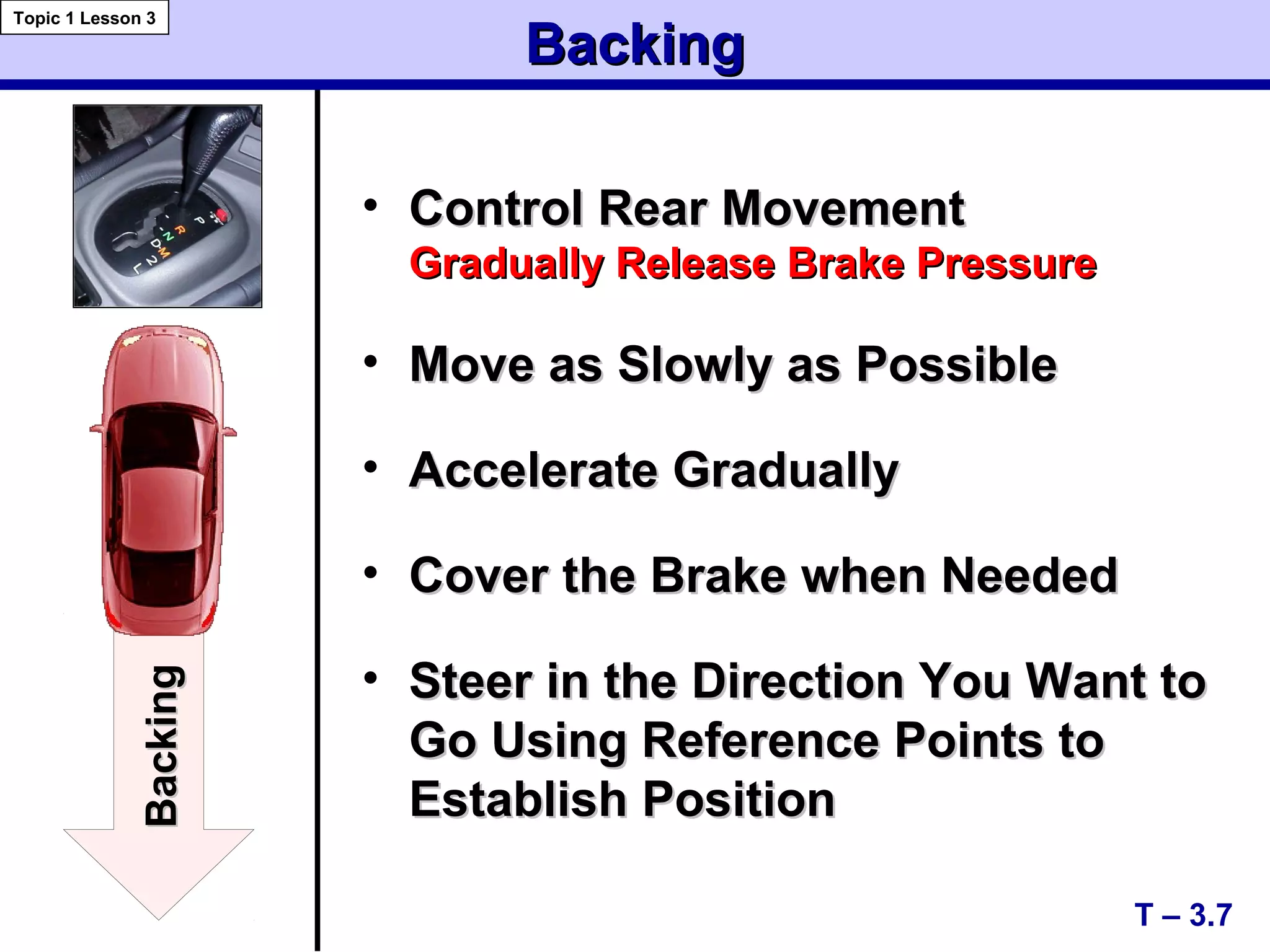
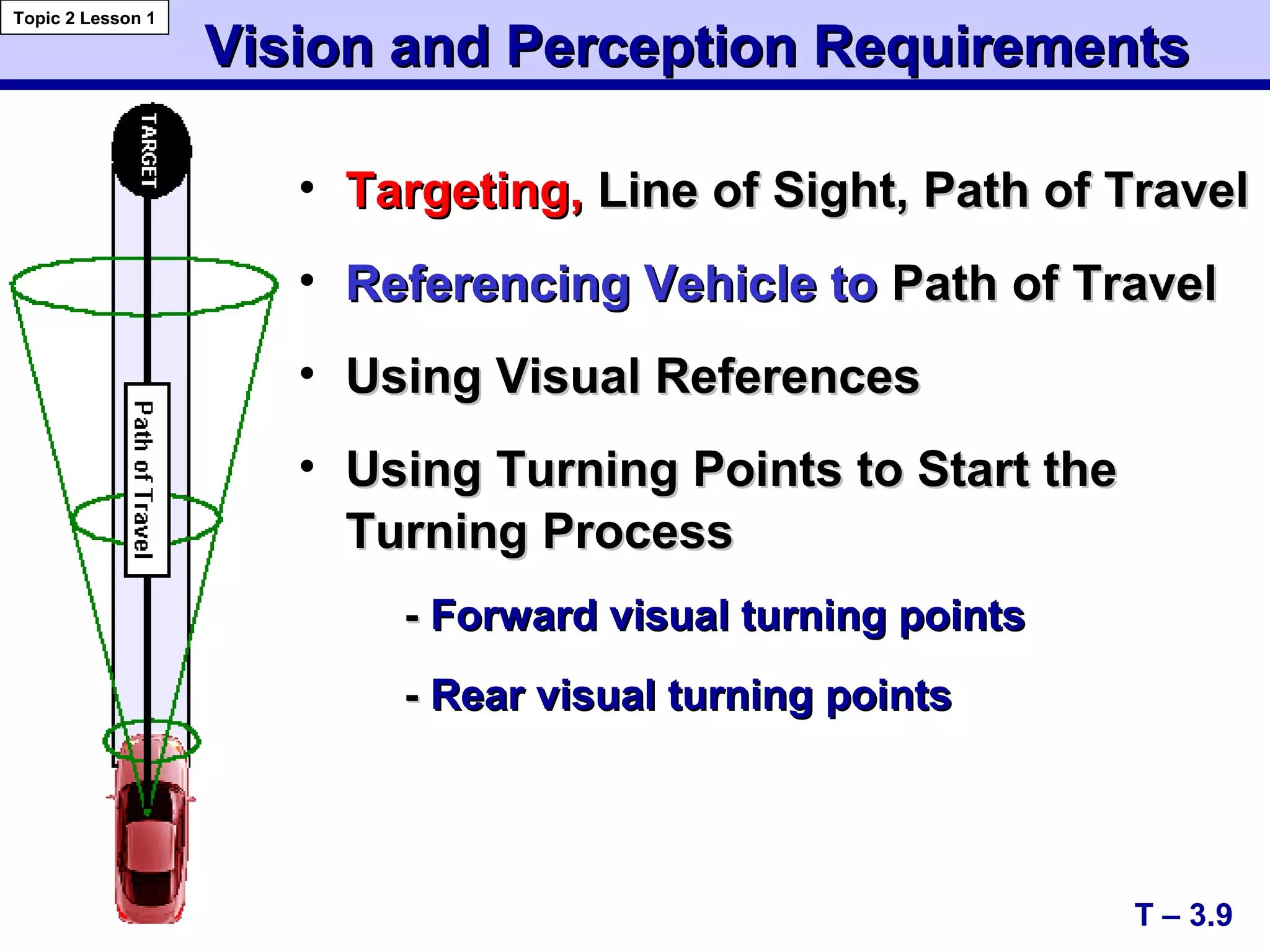
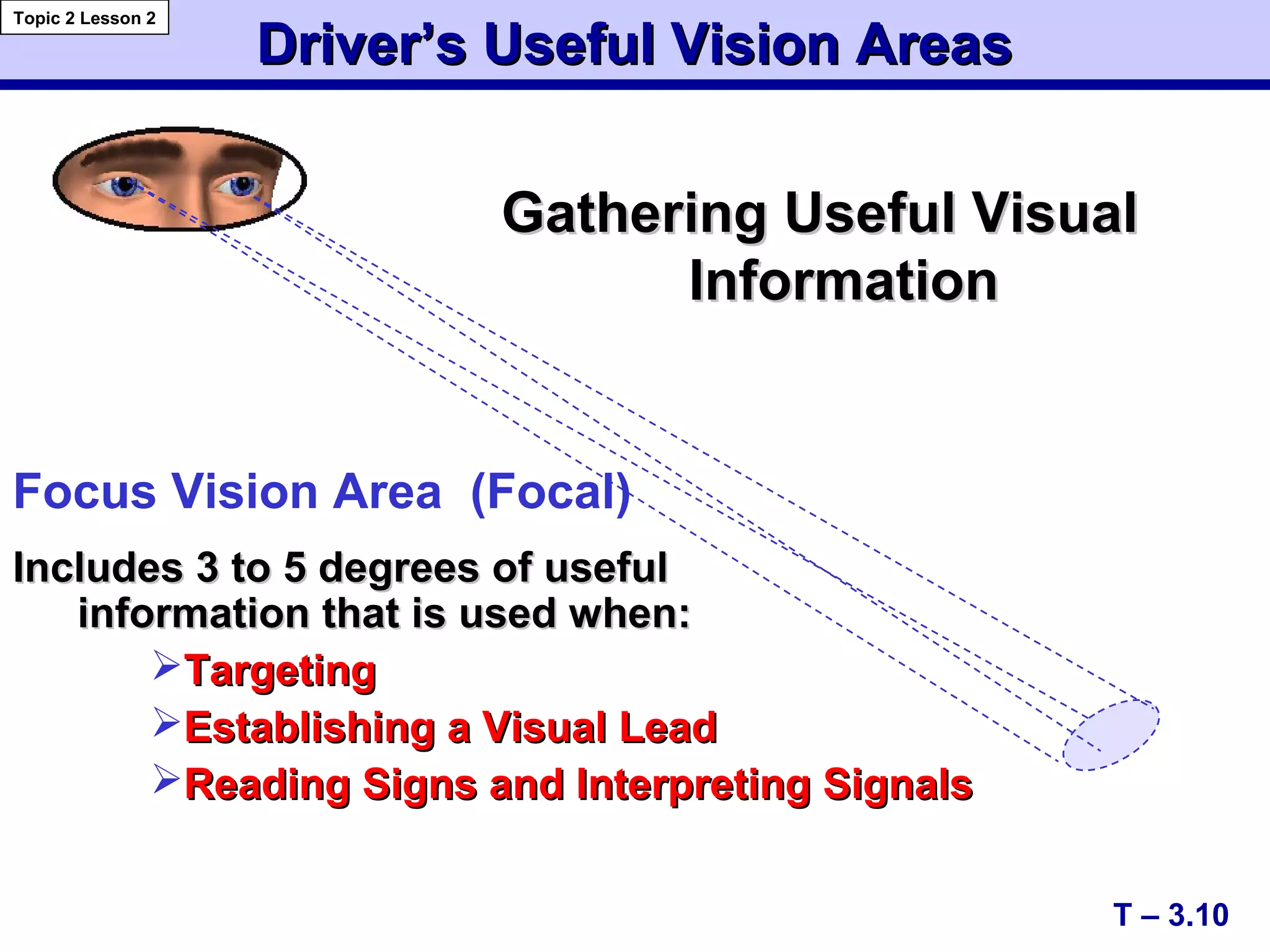
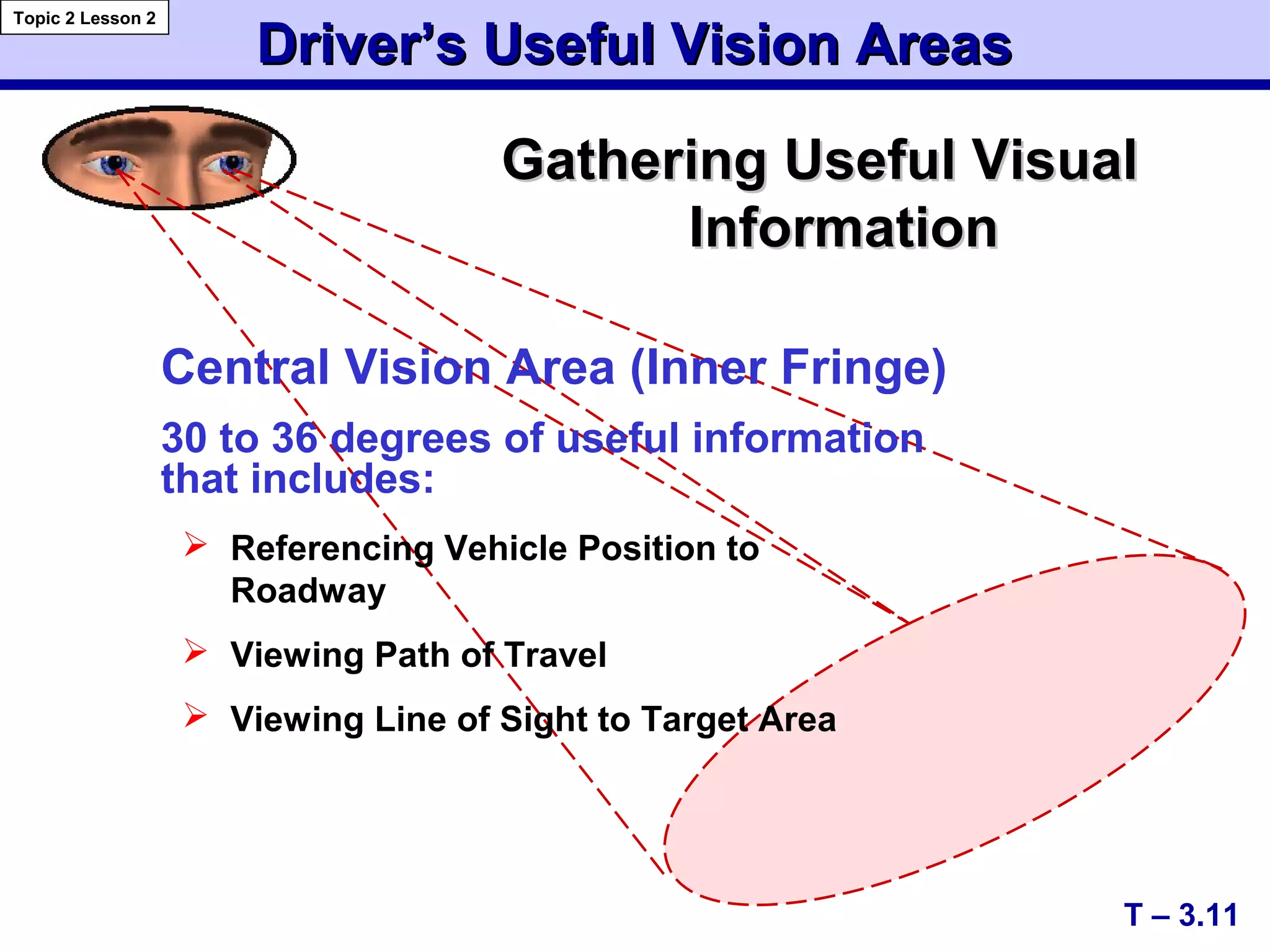
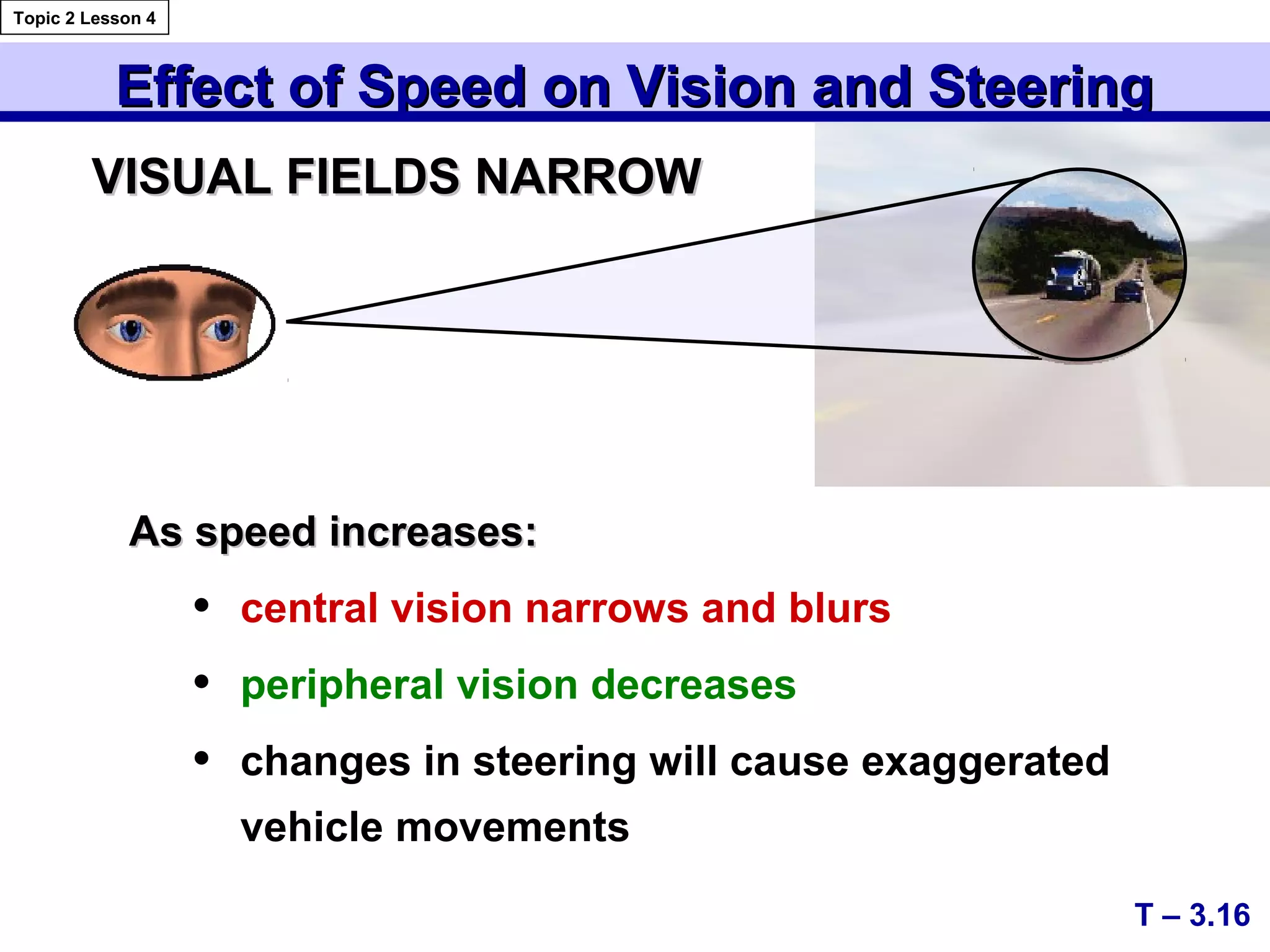
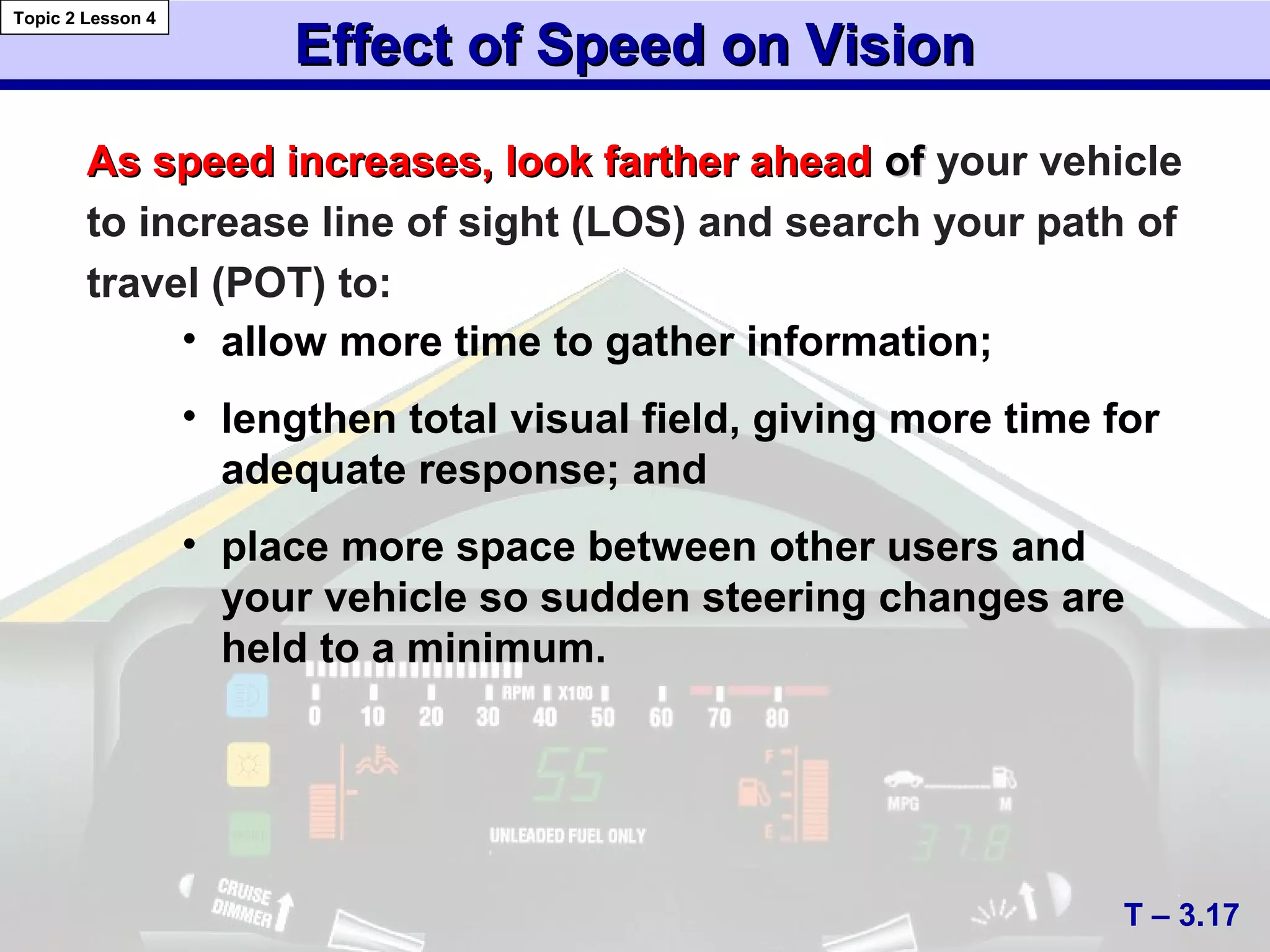
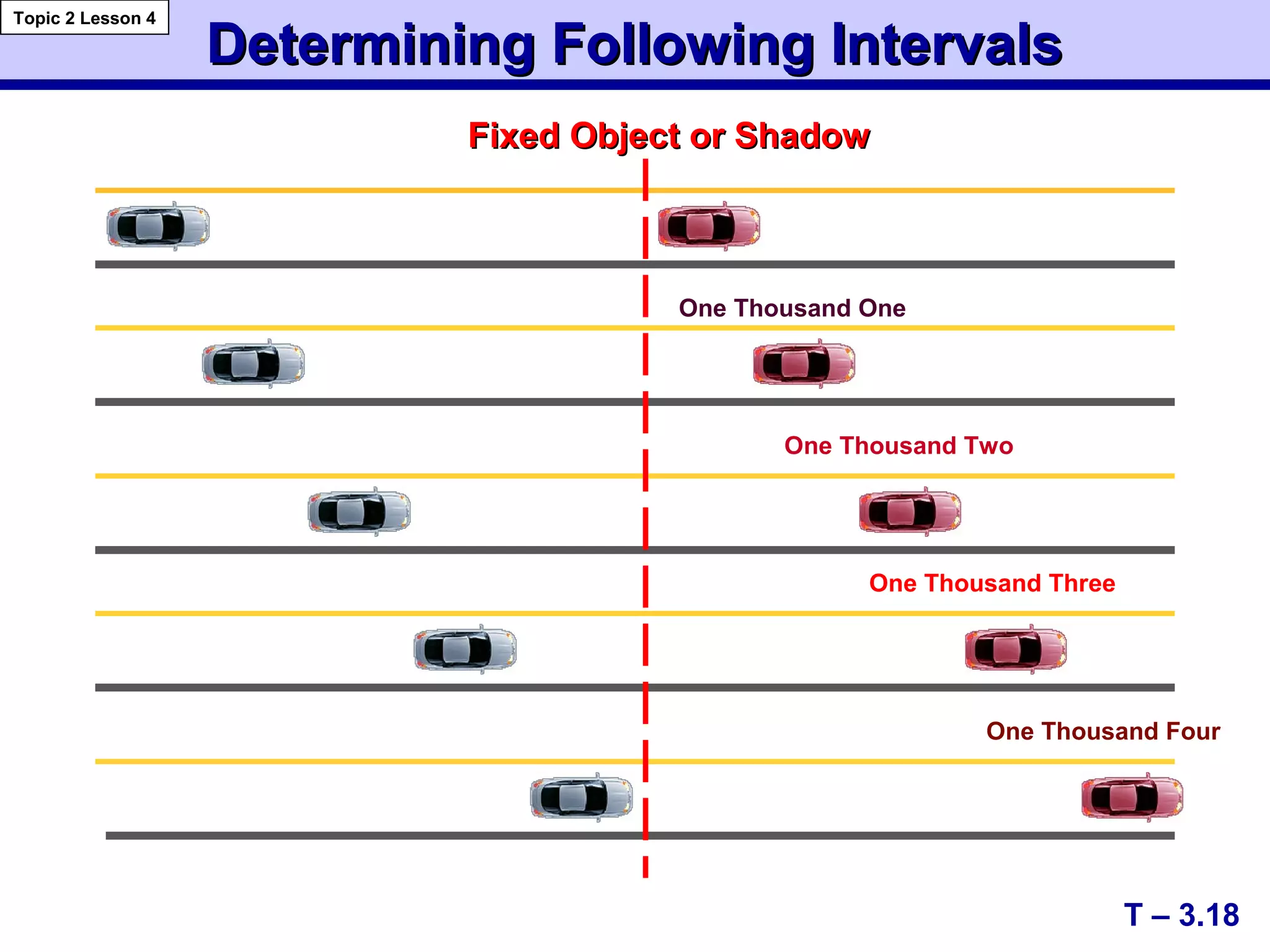
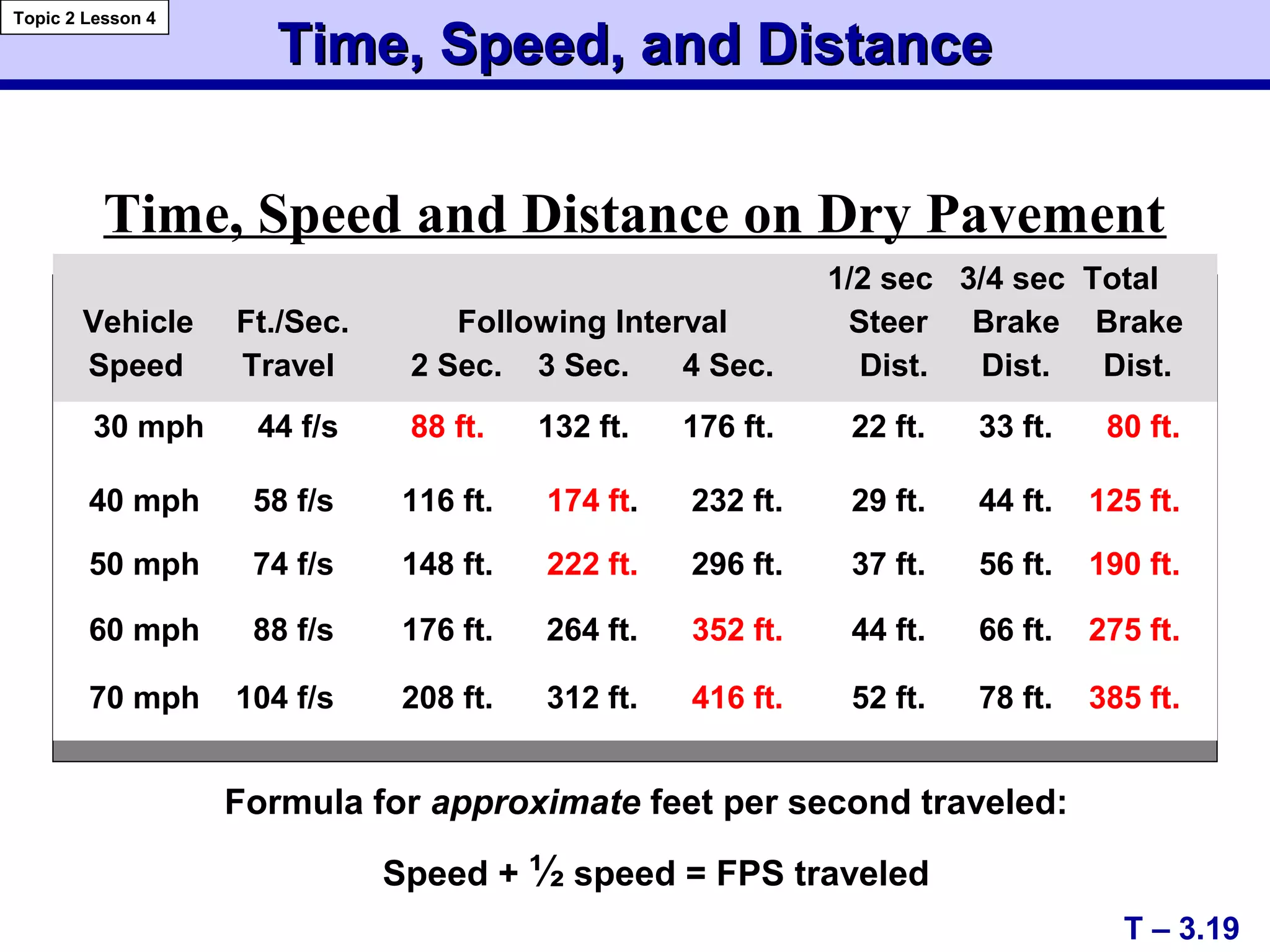
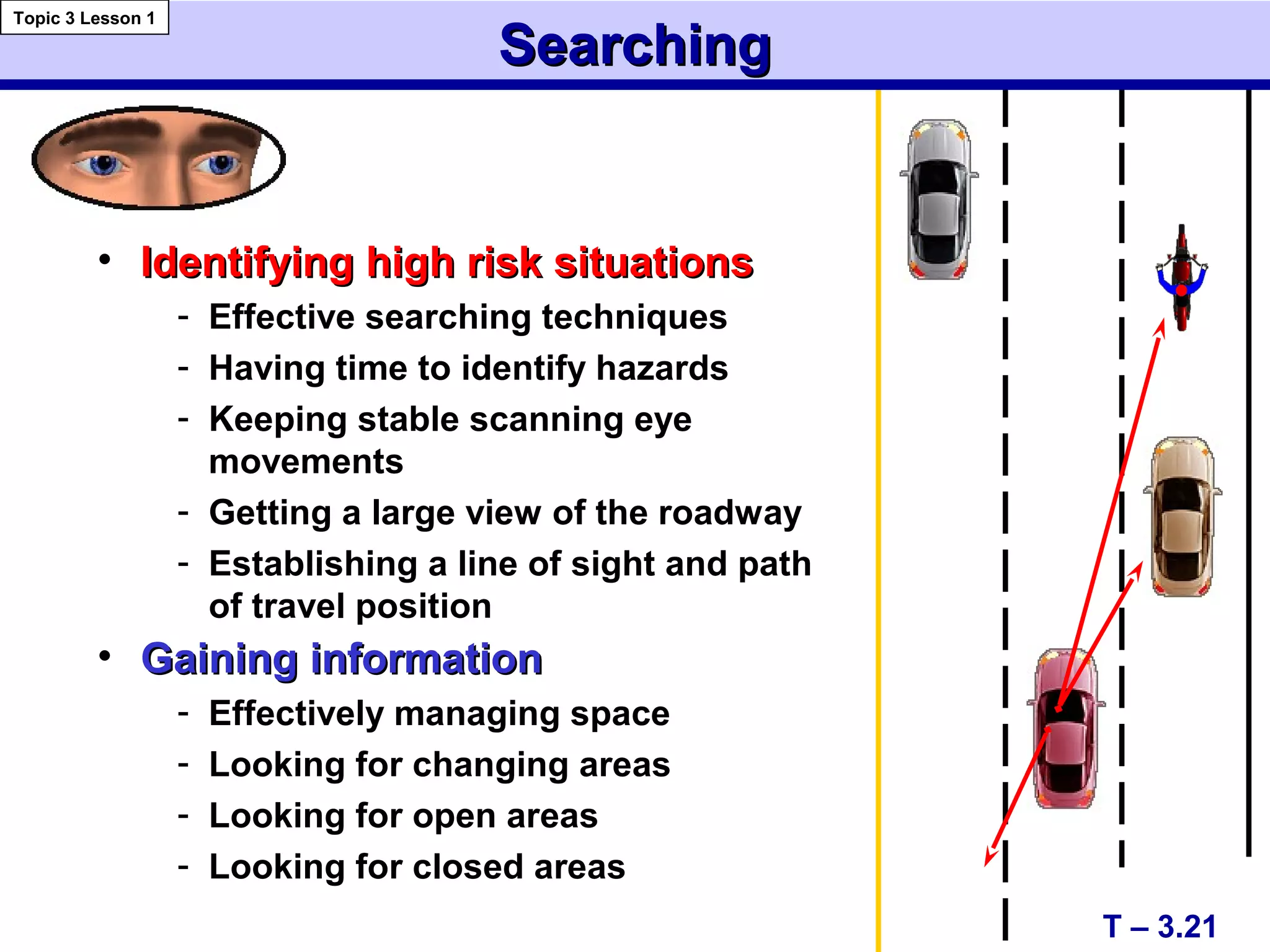
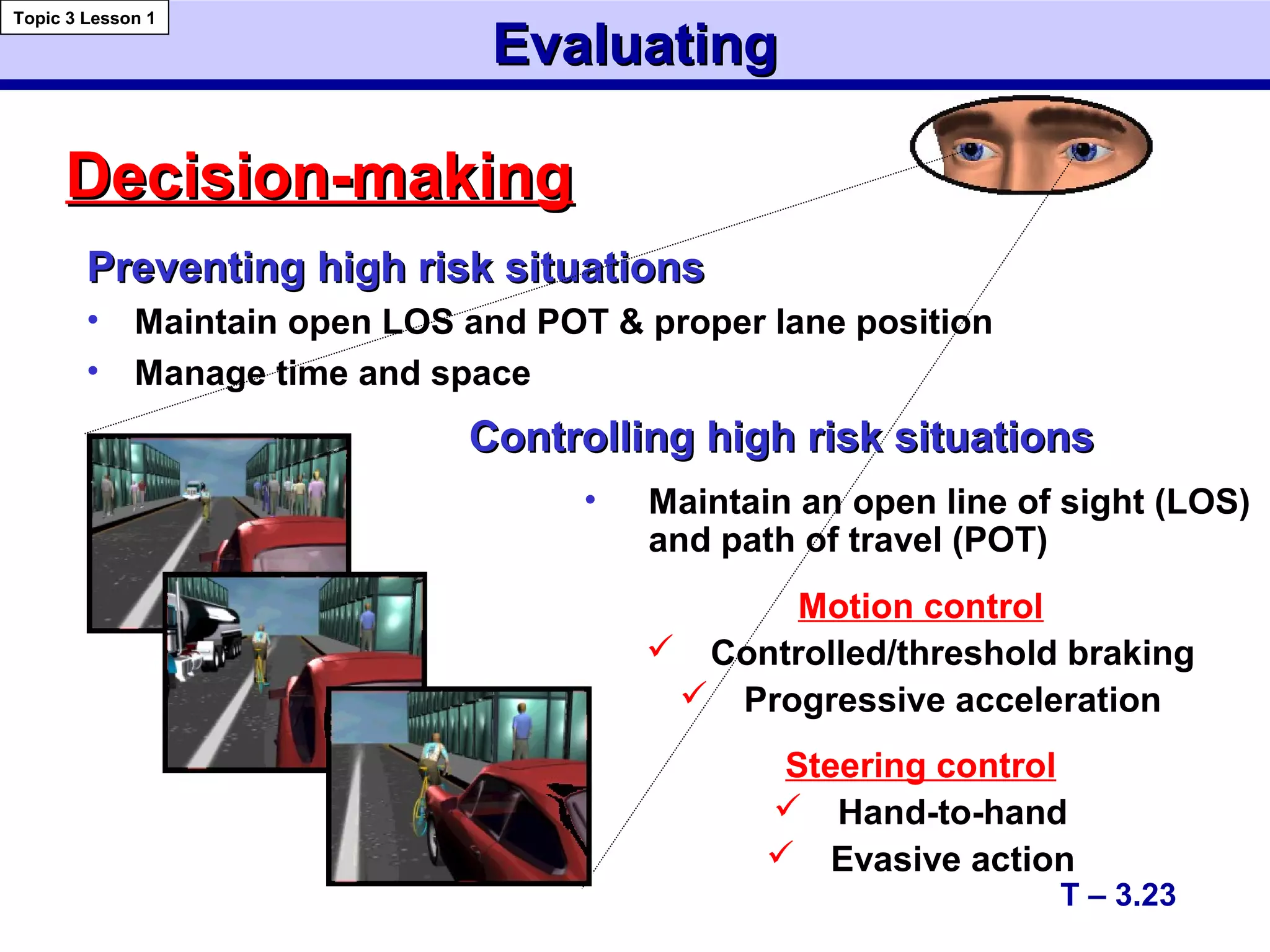
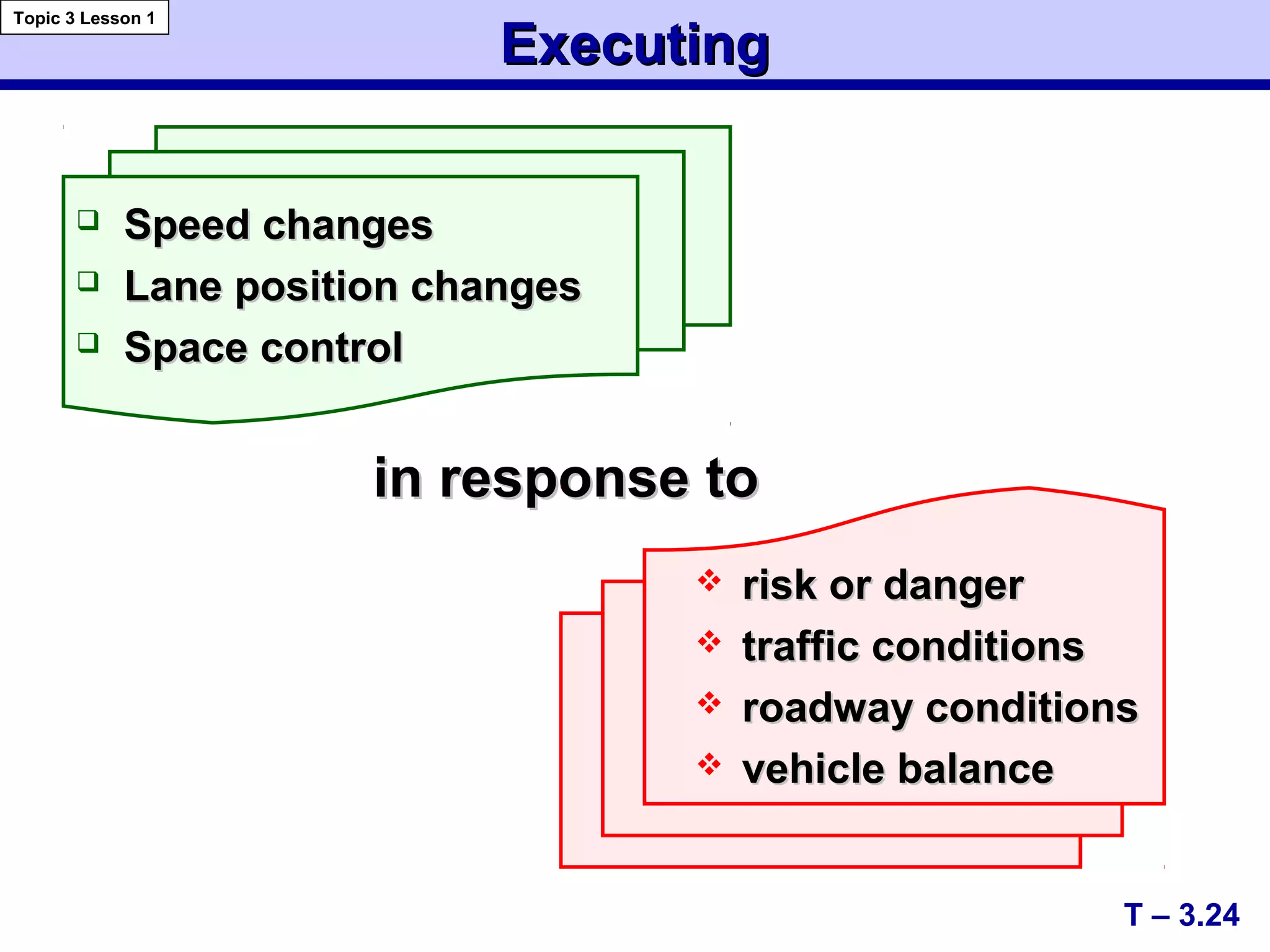
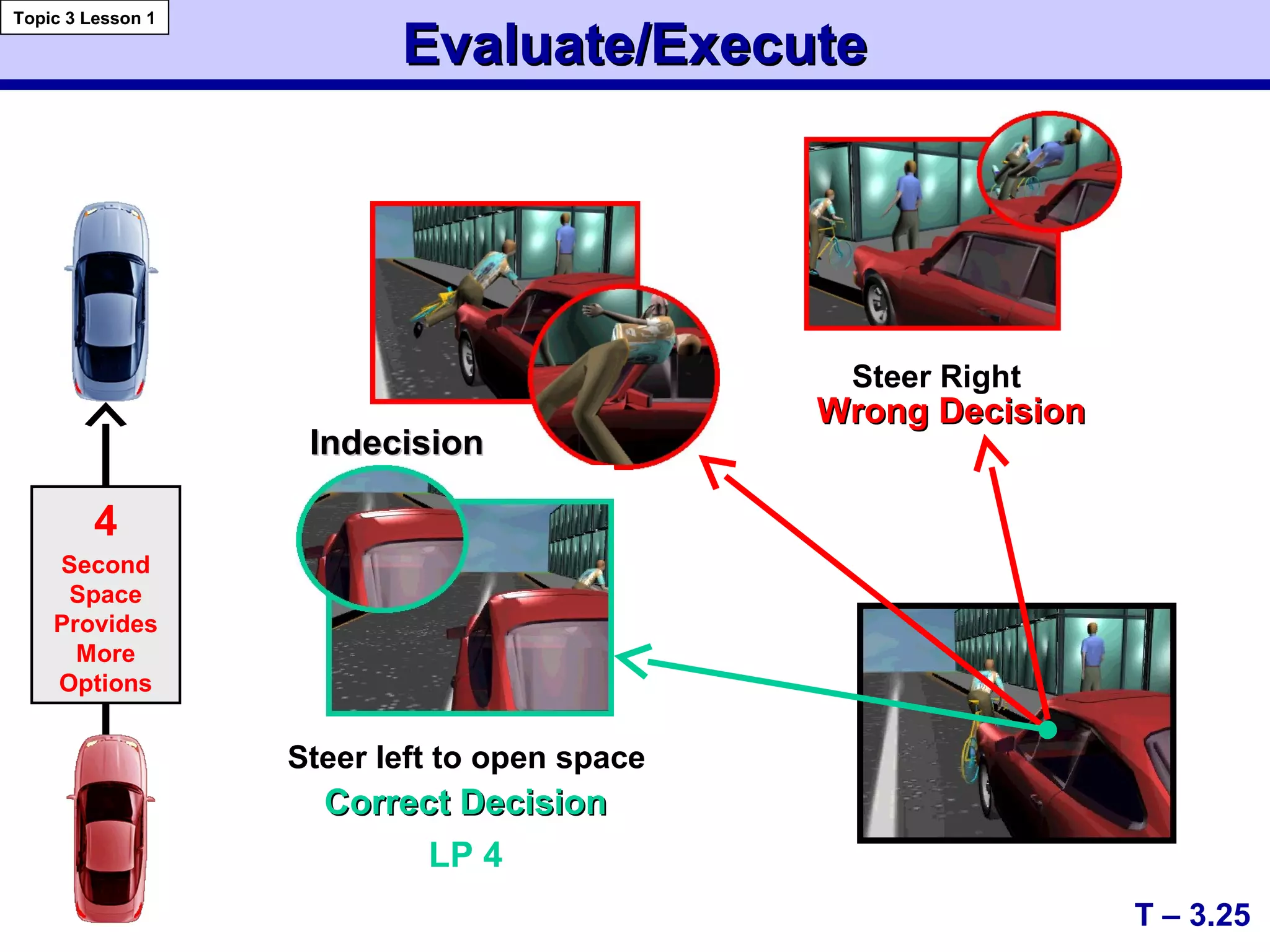
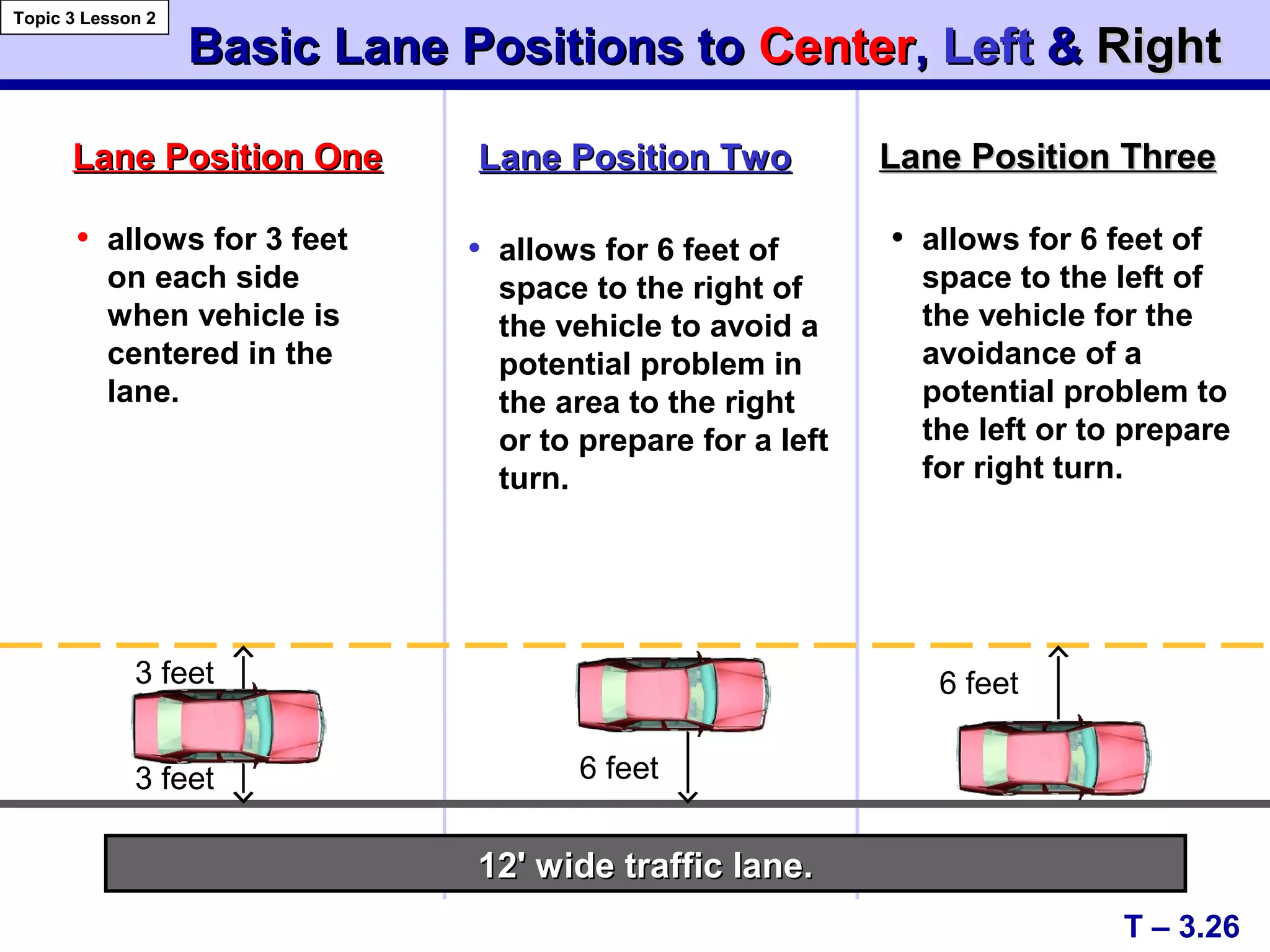
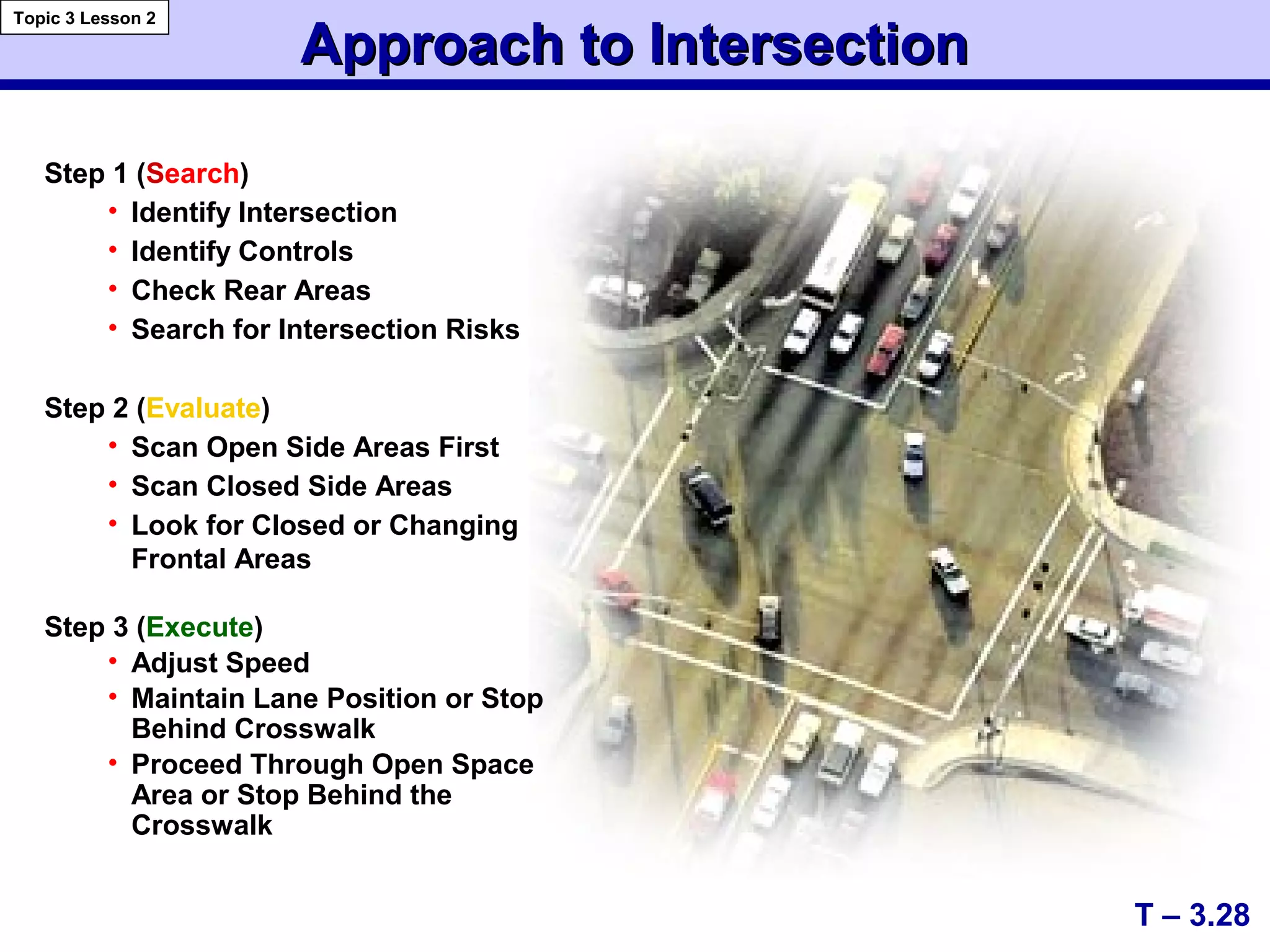
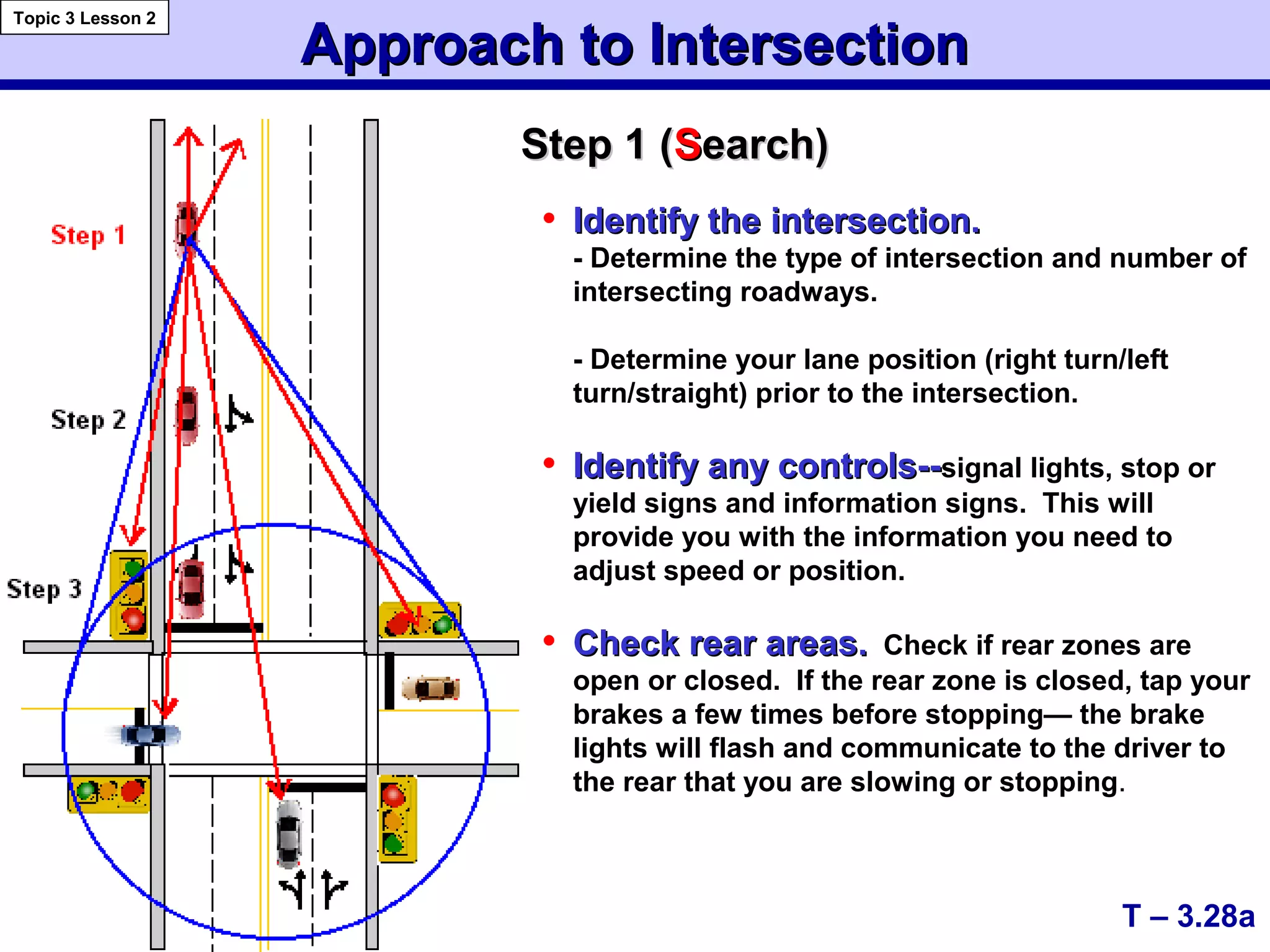
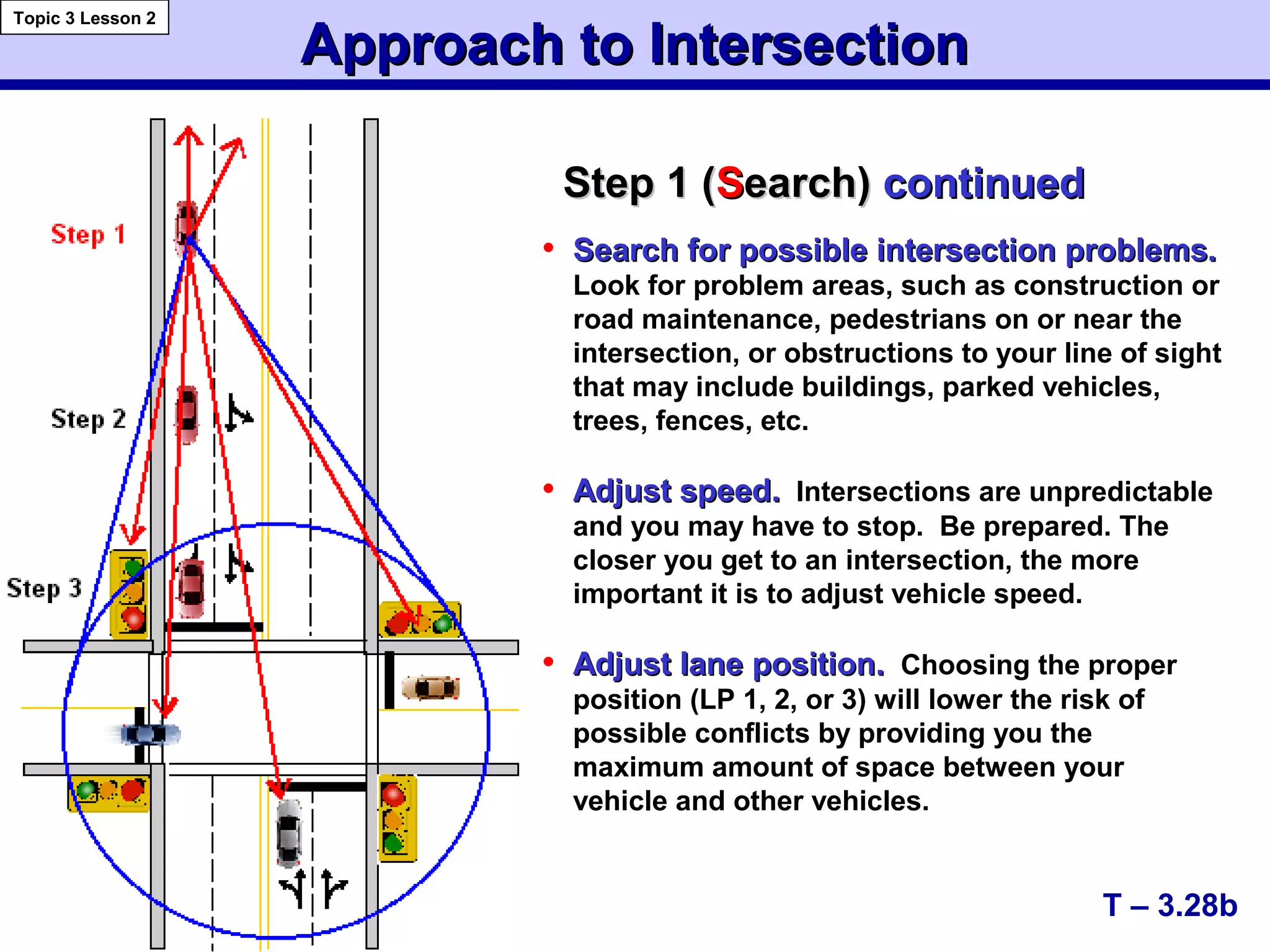
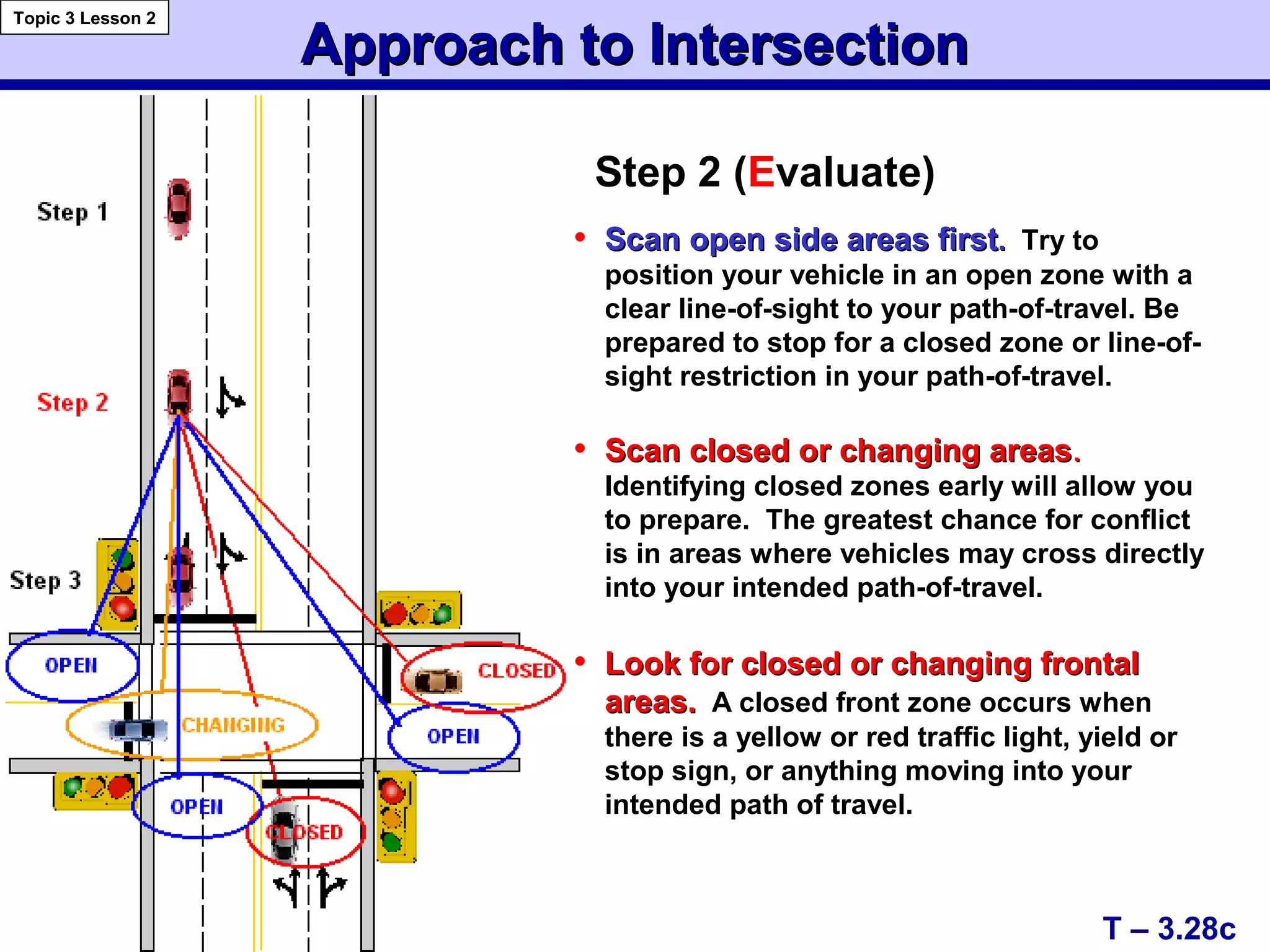
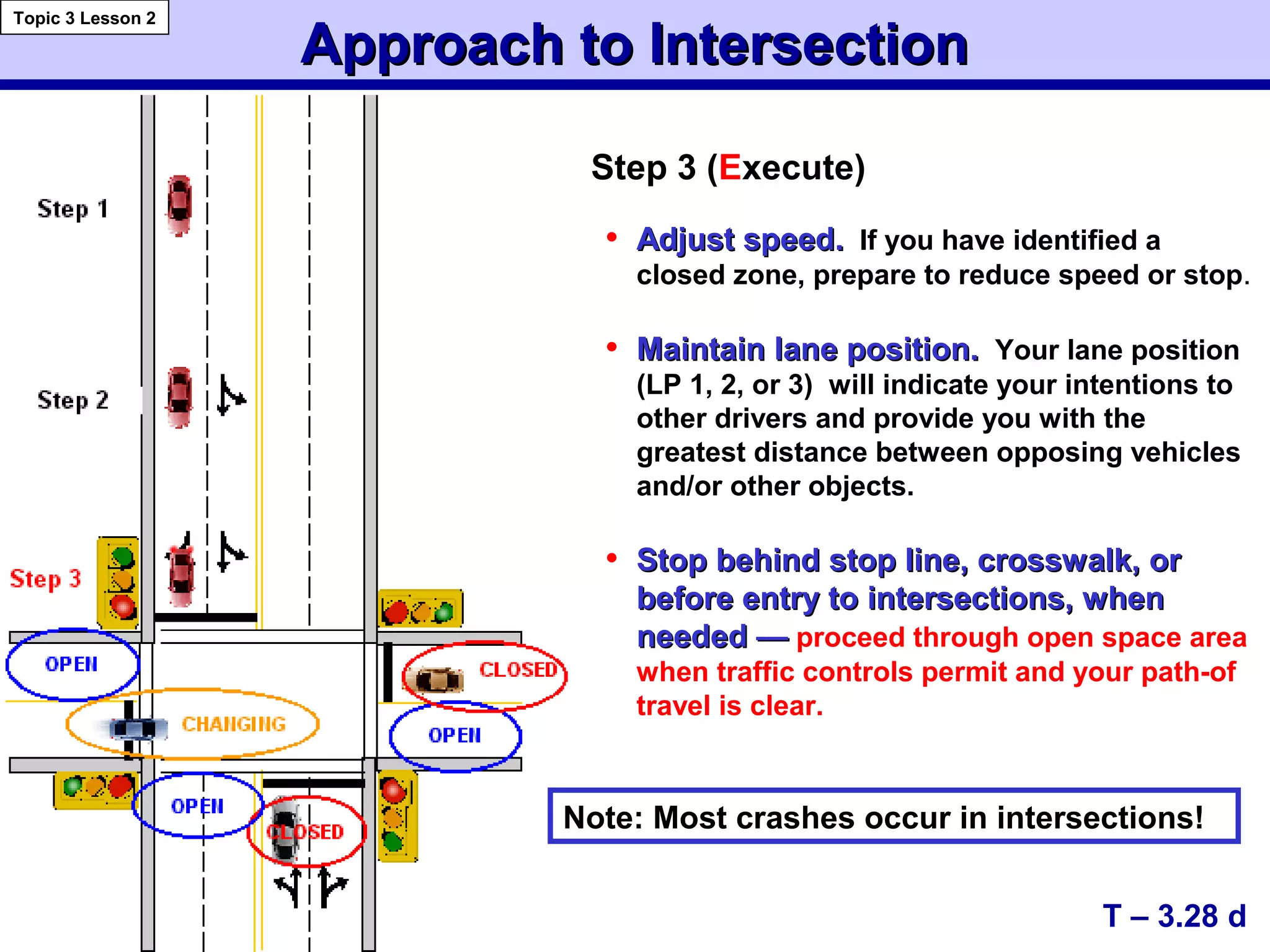
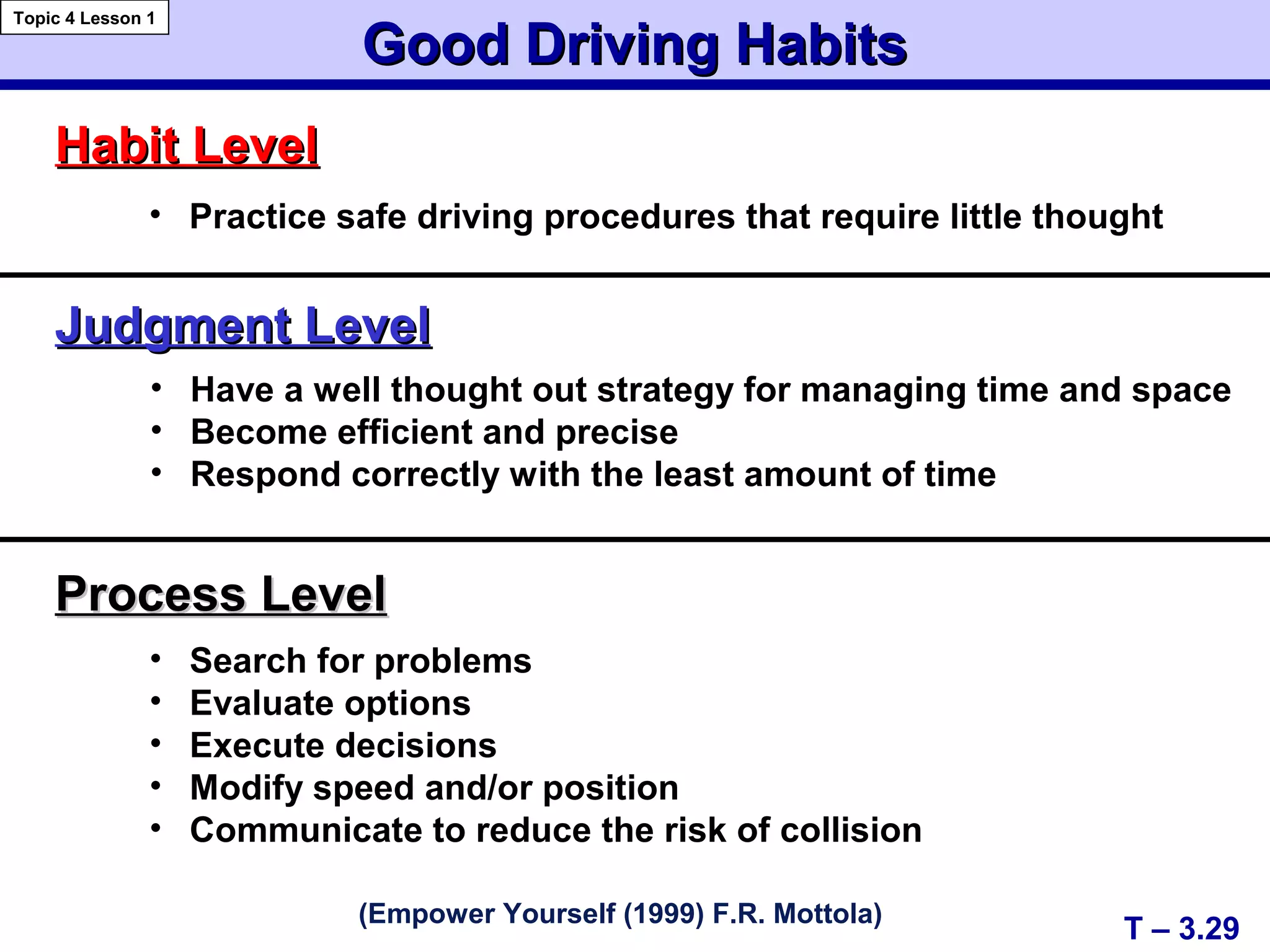
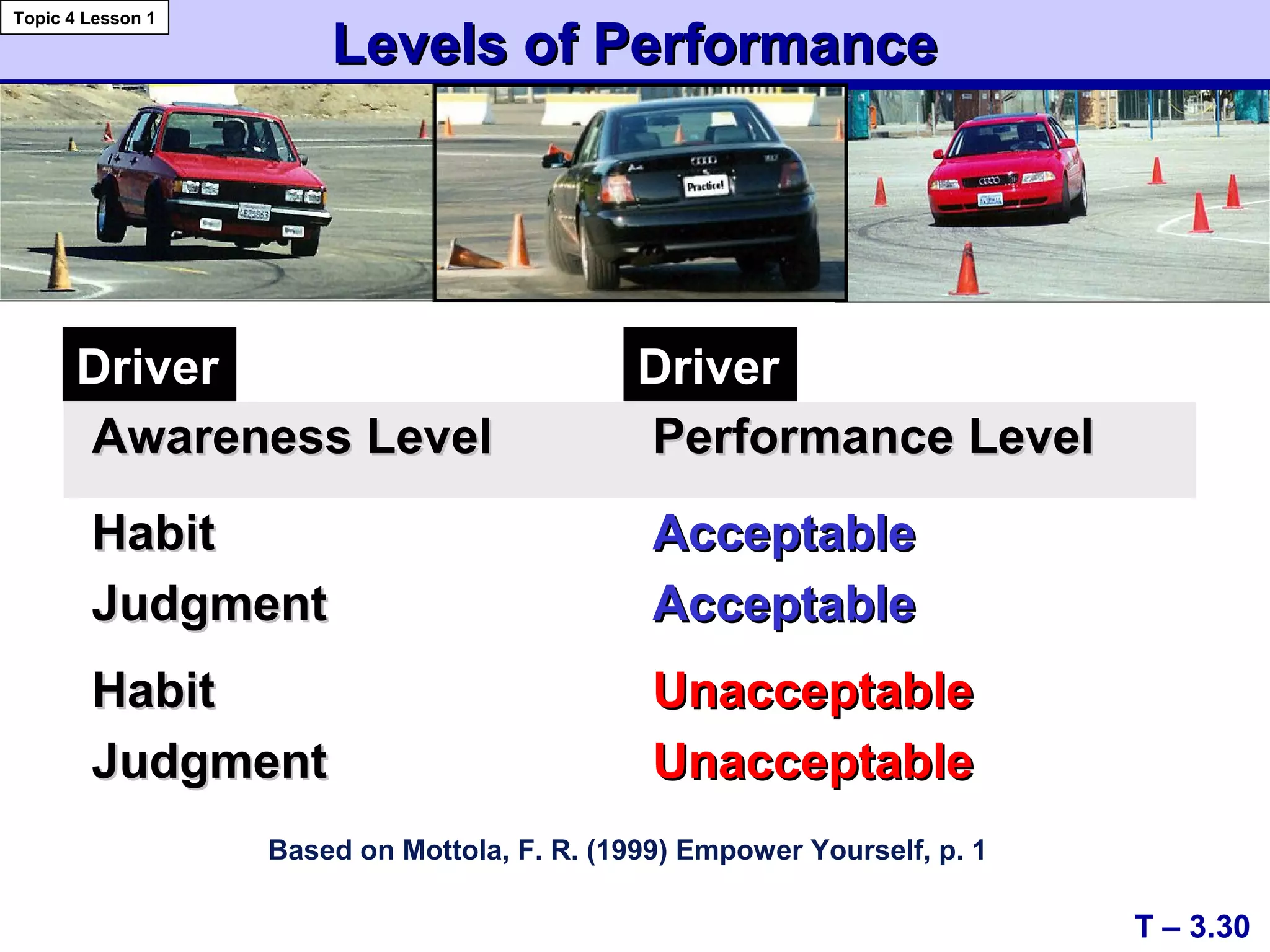
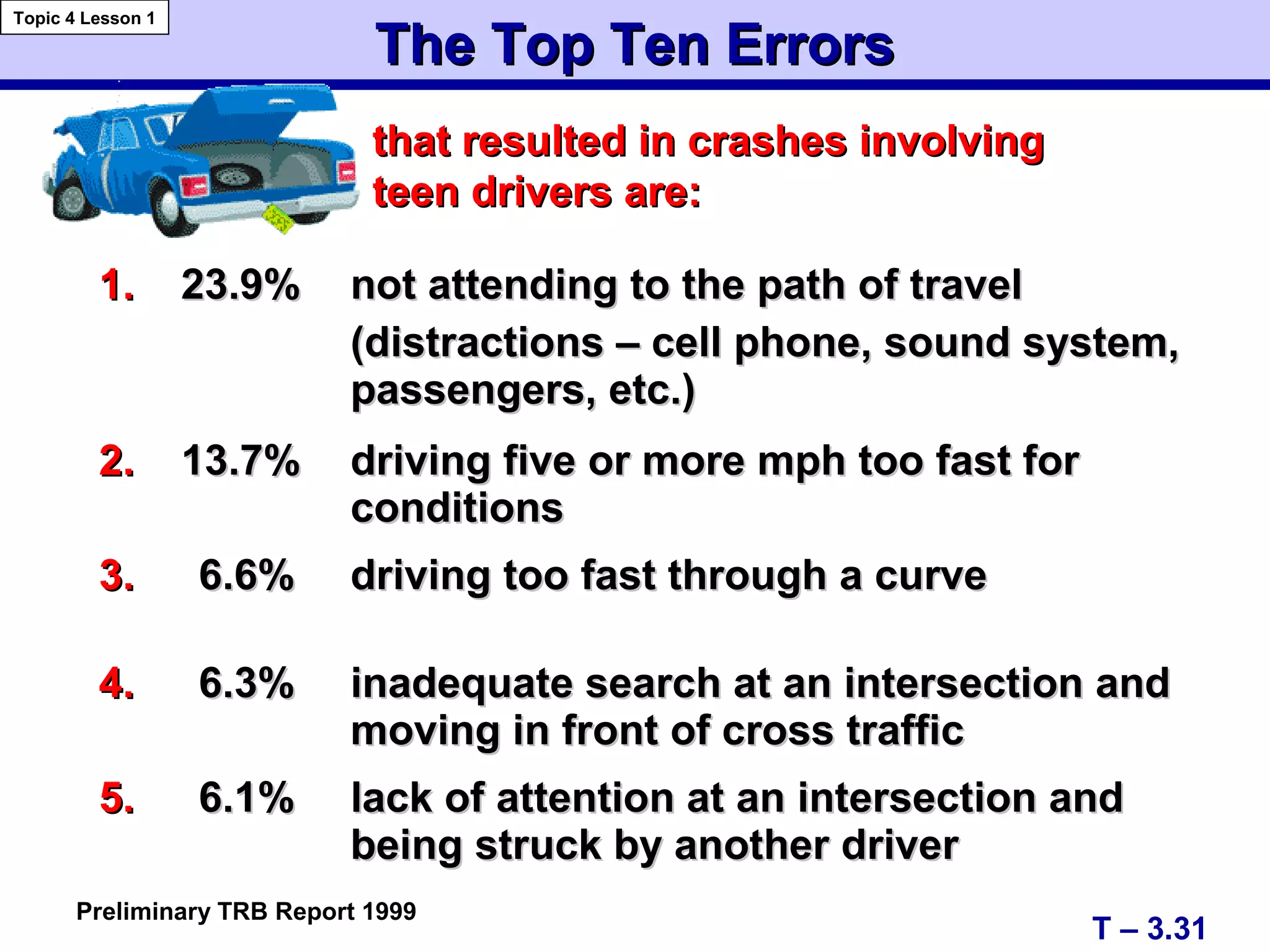
The document provides information on basic driving maneuvers and tasks for a low risk environment. It discusses topics such as basic maneuvers, vision and perception, controlling risk using a space management system, and developing good driving habits. The document contains guidance on tasks like entering roadways, backing up, maintaining proper vision areas, determining following intervals based on speed, and developing an effective space management system through searching and evaluating risks.