MIT Poster
•
0 likes•225 views
1) Researchers developed a reduced-scale prototype of the MantisBot wearable robot to enable testing of stepping algorithms without human trials or a full-scale system. 2) The prototype was designed to have one-third the joint torques and limb lengths of the full-scale robot while maintaining full-scale weight. 3) Testing found the prototype's radial stiffness matched expectations but axial stiffness was less than predicted, providing data to refine the stiffness models for the limb design.
Report
Share
Report
Share
Download to read offline
Recommended
Prolonged Field Care Casualty Card v15
This is the latest version of the Prolonged Field Care Casualty Card for use and download. It can also be found on our website at www.prolongedfieldcare.org This is to be used once the TCCC Card is filled up and you are sitting on a patient for longer than anticipated.
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告.pdf
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告.pdfhttps://mypaper.pchome.com.tw/chanrs/post/1381109792
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告Optimizing Sterile Processing Workflow
The document provides a roadmap for optimizing sterile processing workflows through a seven step process: 1) Mapping workflows; 2) Improving functions and workflow by streamlining, identifying waste, simplifying work processes, and balancing capacity; 3) Optimizing workstation layout and operations sequence; 4) Standardizing work practices; 5) Scheduling processes; 6) Measuring performance; and 7) Active management and supervision. The goal is to produce quality instrument sets efficiently to meet surgical demand with existing resources.
Humanoid project report
This document provides an overview of humanoid robots, including their purpose, design considerations, and development process. Some key points:
- Humanoid robots are designed to resemble the human form and allow for interacting with human tools and environments. Their design often aims to study bipedal locomotion or close cooperation with humans.
- Developing a humanoid robot requires integrating mechanical, electronic, and software components while considering factors like safety, efficiency and dynamic behavior.
- The document outlines a process for efficiently designing humanoid robot modules through subdivision, requirements analysis, component selection, and an iterative development sequence.
- An example is given for developing a shoulder joint module according to this process, considering joint kinematics
Robotics report
This is the final year project on the topic of "Humanoid Robot" it consist of Abstract, Introduction, Literature Survey, System analysis, system requirements, Implementation conclusion and all.
Design Validation and Analysis of a Humanoid Robot
The paper is about the design validation and analysis of a humanoid robot. The robot made is of 34 inches (86.36 cm). The structural design of the humanoid is made on the basis of golden ratio and the results of the design is validated by an already existing humanoid NAO.
Robotics and automationppt
This document discusses robotics, automation, and their applications. It defines robotics as dealing with the design, construction, and programming of robots, while defining automation as using control systems to operate equipment with minimal human intervention. Some key points made include:
- Automation is an extension of robotics and represents the next phase of the industrial revolution.
- Examples of current applications include driverless cars, 3D printing, and chatbots.
- Advantages include quality, accuracy, quantity of production, and ability to work continuously without tiring. Disadvantages include potential job losses and costs.
- Robotics and automation are used widely in industries like manufacturing, medicine, mining, and the military. Emerging
Recommended
Prolonged Field Care Casualty Card v15
This is the latest version of the Prolonged Field Care Casualty Card for use and download. It can also be found on our website at www.prolongedfieldcare.org This is to be used once the TCCC Card is filled up and you are sitting on a patient for longer than anticipated.
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告.pdf
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告.pdfhttps://mypaper.pchome.com.tw/chanrs/post/1381109792
樂活照顧服務園區OT案-樂活長照機構規劃之共利預期效益 --詹翔霖副教授公共工程及施政計畫成本效益分析報告Optimizing Sterile Processing Workflow
The document provides a roadmap for optimizing sterile processing workflows through a seven step process: 1) Mapping workflows; 2) Improving functions and workflow by streamlining, identifying waste, simplifying work processes, and balancing capacity; 3) Optimizing workstation layout and operations sequence; 4) Standardizing work practices; 5) Scheduling processes; 6) Measuring performance; and 7) Active management and supervision. The goal is to produce quality instrument sets efficiently to meet surgical demand with existing resources.
Humanoid project report
This document provides an overview of humanoid robots, including their purpose, design considerations, and development process. Some key points:
- Humanoid robots are designed to resemble the human form and allow for interacting with human tools and environments. Their design often aims to study bipedal locomotion or close cooperation with humans.
- Developing a humanoid robot requires integrating mechanical, electronic, and software components while considering factors like safety, efficiency and dynamic behavior.
- The document outlines a process for efficiently designing humanoid robot modules through subdivision, requirements analysis, component selection, and an iterative development sequence.
- An example is given for developing a shoulder joint module according to this process, considering joint kinematics
Robotics report
This is the final year project on the topic of "Humanoid Robot" it consist of Abstract, Introduction, Literature Survey, System analysis, system requirements, Implementation conclusion and all.
Design Validation and Analysis of a Humanoid Robot
The paper is about the design validation and analysis of a humanoid robot. The robot made is of 34 inches (86.36 cm). The structural design of the humanoid is made on the basis of golden ratio and the results of the design is validated by an already existing humanoid NAO.
Robotics and automationppt
This document discusses robotics, automation, and their applications. It defines robotics as dealing with the design, construction, and programming of robots, while defining automation as using control systems to operate equipment with minimal human intervention. Some key points made include:
- Automation is an extension of robotics and represents the next phase of the industrial revolution.
- Examples of current applications include driverless cars, 3D printing, and chatbots.
- Advantages include quality, accuracy, quantity of production, and ability to work continuously without tiring. Disadvantages include potential job losses and costs.
- Robotics and automation are used widely in industries like manufacturing, medicine, mining, and the military. Emerging
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
1. The document discusses using model predictive control and reinforcement learning to teach a robotic leg to jump a certain height. Model predictive control is used to regulate the leg's dynamics like torque and angles, while reinforcement learning helps the leg adapt through trial and error.
2. Reinforcement learning algorithms like PPO and A2C are applied to give feedback based on successful or unsuccessful jumps. This helps the robotic leg learn over time to precisely jump the target height.
3. Legged robots have an advantage over wheeled robots in navigating uneven terrain. Quadruped robots like Boston University's Mini Cheetah can move quickly over varied surfaces using model predictive control of its leg actuators and sensors.
Review on Development of Industrial Robotic Arm
This document discusses the development of an industrial robotic arm. It provides an abstract that outlines the aim to develop a lightweight robotic arm using materials like aluminum and carbon fiber. It also discusses the need to reduce friction on internal cabling. The document then reviews literature on various robotic arms and their applications. This includes arms controlled by accelerometers, haptic technology, and for applications like spot welding. It discusses the key components of a robotic arm like links, joints, end effectors. Finally, it provides conclusions that the developed arm can precisely control movements and help with tasks like picking hazardous objects.
Space robotics
This ppt will give you information about space robotics, its applications and how much important role they are doing in day to day life viz; reducing human efforts,pick and place,marketing,etc.
Ar35247251
The document discusses the applications of robotics in medicine. It describes how robotic surgery can accomplish tasks with more precision and repeatability than human surgeons. Robots are being used for minimally invasive surgeries of the heart, brain, spine, and other areas. The document also discusses how surgical planning works using imaging and 3D modeling to plan robotic procedures. It explains the registration process that aligns the robotic system to the patient. Finally, it briefly discusses developing technologies like nanorobotics and potential future applications.
Designing a suitable robotic arm for loading and unloading of material on lat...
The document describes the design of a robotic arm to automatically load and unload workpieces on a lathe machine. The robotic arm would be mounted on a movable table attached to the lathe. It was designed using CAD software and simulated using workspace simulation software. The robotic arm has a 7-axis configuration including a gripper with dual four-fingered hands to load and unload workpieces simultaneously, increasing productivity. An electric drive system is proposed to power the robotic arm for its light loading tasks. The design aims to reduce non-operation time on the lathe and allow one person to manage multiple machines.
Shamira-IIECE.pptx
This paper describes the hardware system of a socially interactive robot called Quori. Quori consists of an upper humanoid body with a rear projection and two gesturing arms mounted on a holonomic mobile base. The base allows for omnidirectional movement up to 0.8 m/s. Sensors like a laser range finder and cameras are used to sense the robot's internal state and environment. The design aims to create a low-cost, modular robot platform with maximum functionality for social interaction research.
Human–Robot Interaction: Status and Challenges. Sheridan MIT
Human–Robot Interaction: Status and Challenges
Thomas B. Sheridan, Massachusetts Institute of Technology, Cambridge Human factors
Reptile robot
The document outlines the design of a snake robot with the following key points:
1. It proposes designing a snake robot without wheels that uses 8 servo motors and an Arduino microcontroller for locomotion on rough terrain.
2. The robot will be 3D modeled and simulated in MATLAB and Solidworks before hardware implementation.
3. The aims are to study robot kinematics and mechanics, implement hardware and software, and understand locomotion to move like a snake.
4. Expected outcomes include uses for the robot in industries like inspection, rescue missions where it can access hard to reach places, and for military surveillance.
introduction to Robotics (the role of computer science)
This document provides an introduction to robotics, including definitions of robotics, the history of robots from the first industrial robot installed in 1961 through current generations, and types of robots such as pre-programmed, humanoid, autonomous, teleoperated, and augmenting robots. It also discusses how computer science relates to robots through areas like artificial intelligence and sensor processing, and gives examples of applications of current and future robots in areas like medical care, bomb disposal, transportation, exploration, and more.
Worldwide Snake Robots Market 2013 to 2019:Industry Analysis Report
Snake Robots Market Shares, Strategies, and Forecasts, Worldwide, 2013 to 2019 @ http://www.researchmoz.us/snake-robots-market-shares-strategies-and-forecasts-worldwide-2013-to-2019-report.html
TECHNICAL SEMINAR.pptx
This document provides a summary of a technical seminar presentation on multi-robot systems for space applications. The presentation covered topics including what space robots are, why they are used, examples of multi-robot systems, how path planning algorithms work, the key technologies used in space robots, a proposed multi-robot system architecture, the importance of space robots, types of space robots, and future space missions that will utilize robotics. The presentation provided information on space robots through diagrams, flow charts, and explanations of concepts like sensing, planning, control and execution in multi-robot systems.
Design and Analysis of a Multi Fingered Gripper for Grasping Irregular Objects
This document describes the design and analysis of a multi-fingered gripper for grasping irregular objects. The gripper was designed using Pro-E and ANSYS software and aims to grasp objects of various shapes, sizes and weights using a minimum number of actuators. Kinematic and dynamic analyses of the gripper were performed to support the novel design. The gripper is intended to have applications as a robot end effector or prosthetic hand. It uses a simple linkage mechanism and pneumatic actuation for the fingers to grasp irregularly shaped objects, mimicking the grasping ability of the human hand.
humanoid_robots_final.ppt
The document provides an overview of human-robot interaction. It discusses how robots can interact with humans through touch, vision, speech recognition, robotic voice, gestures, facial expressions, artificial emotions, and personality. Various techniques for developing robotics are also covered, such as evolutionary robotics and developmental robotics. The document outlines projections for integration of robots into households, organizations and jobs over the next few decades from sources like the South Korean and Japanese governments and private companies. It also notes potential issues like robots demanding rights or straining resources that could arise if development and use of robots accelerates rapidly.
humanoid_robots_final.pptx
Riya Maitra's presentation discusses human emotions in robots. It provides definitions of robots and robotics, describes different types of robots including industrial, humanoid, and social robots. It explains how robots interact with humans through touch, vision, speech recognition, gestures, facial expressions and artificial emotions. The presentation outlines techniques for developing robotics like evolutionary robotics and developmental robotics. It presents projections for incorporating robots in households, manufacturing, healthcare and military between now and 2050. In conclusion, it notes robots could one day demand rights and their rise strains resources and environment, though the technology could also be misused destructively.
Humanoid robot
This document presents information about humanoid robots. It was presented by Som Mishra, a third year electronics and communication engineering student at BIET Jhansi, under the guidance of Dr. D.K. Srivastava. The document discusses the introduction of humanoid robots, their purposes, key components like sensors and actuators, types including wheeled and biped robots, advantages like ability to perform tasks without complaints, and disadvantages such as high costs. It concludes that robotics is still a developing field with potential for new applications.
Military Robots
The document discusses the need for and types of military robots. It describes examples like the MQ1-Predator drone and BIGDOG quadruped robot. The document outlines research objectives like developing more autonomous robots that can help soldiers with dangerous tasks. Challenges include communication, power storage, navigation, and dexterous manipulation. Near-future applications may include exoskeletons to augment a soldier's abilities.
MaartenDekker_Mechanical_design_of_a_humanoid_robots_lower_body
A new mechanical design is proposed for a humanoid robot's lower body that improves walking and posture dynamics over an existing robot called TUlip. The new design aims to create a lower body that is more human-like, with a waist, upper legs, lower legs and feet that have a redundant and human-like kinematic configuration of 16 degrees of freedom. Each leg will consist of five degrees of freedom and the waist section will consist of six degrees of freedom. The actuations are designed to be stiff, backdrivable with minimal backlash and capable of providing adequate torque for the joints. The result is intended to be a humanoid lower body with a more human-like configuration, link dimensions, link masses and range of
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...Association of Scientists, Developers and Faculties
A prosthetic is a device that replaces any missing human body part visibly and functionally. Reverse engineering is a field of engineering wherein a model and further a prototype can be generated by extracting information from previous design or available model using the advanced tools of CAD/CAM. This paper aims at exploring the needs and advantages of connecting the prosthetic industry with reverse engineering in a developing country like India for patients with lower limb amputations under the brimming concept of “Make in India”.Robotics and ai
This presentation provides an overview of robotics and AI. It defines a robot as a machine that can sense its environment, think to follow instructions, and act. Current developments include robots that can perform surgery, explore hazardous areas, and recognize faces and objects. Industrial and manufacturing robots are widely used today. Issues include robots being unable to handle unexpected situations and potentially increasing unemployment, though future developments may focus on greater intelligence, learning ability, and human-friendly design.
Advancement in robotics
This document discusses various types and applications of robots. It describes industrial robots, military robots, aerospace robots, and healthcare robots. It provides details on articulated, SCARA, Delta, and Cartesian robots used for material handling, processing, assembly, inspection, and other industrial applications. The document also discusses military robots used for clearing minefields and deactivating bombs. Aerospace robots are discussed for space exploration. Healthcare robots include magnetic microbots for medical procedures. Examples of military robots include Dragon Runner, TALON, ACER, and Packbot. The document also summarizes humanoid robots, swarm robots, prosthetics, neural networks, and prediction robots.
CV
Jairo Maldonado-Contreras is a mechanical engineering student at California State University Long Beach with extensive research experience in robotics. He has interned at NASA JPL, MIT, and Northwestern University researching topics like hybrid vehicles, prosthetics, and community mobility monitoring. Maldonado-Contreras maintains a 3.62 GPA and has presented his work at several conferences, including IEEE EMBC and SHPE National. Upon graduation, he intends to pursue a PhD in robotics.
49er Magazine Interview
I was selected by CSULB's 49er Magazine to tell my story of success in the face of adversity, and how the BESST program played an important part in that success.
More Related Content
Similar to MIT Poster
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
1. The document discusses using model predictive control and reinforcement learning to teach a robotic leg to jump a certain height. Model predictive control is used to regulate the leg's dynamics like torque and angles, while reinforcement learning helps the leg adapt through trial and error.
2. Reinforcement learning algorithms like PPO and A2C are applied to give feedback based on successful or unsuccessful jumps. This helps the robotic leg learn over time to precisely jump the target height.
3. Legged robots have an advantage over wheeled robots in navigating uneven terrain. Quadruped robots like Boston University's Mini Cheetah can move quickly over varied surfaces using model predictive control of its leg actuators and sensors.
Review on Development of Industrial Robotic Arm
This document discusses the development of an industrial robotic arm. It provides an abstract that outlines the aim to develop a lightweight robotic arm using materials like aluminum and carbon fiber. It also discusses the need to reduce friction on internal cabling. The document then reviews literature on various robotic arms and their applications. This includes arms controlled by accelerometers, haptic technology, and for applications like spot welding. It discusses the key components of a robotic arm like links, joints, end effectors. Finally, it provides conclusions that the developed arm can precisely control movements and help with tasks like picking hazardous objects.
Space robotics
This ppt will give you information about space robotics, its applications and how much important role they are doing in day to day life viz; reducing human efforts,pick and place,marketing,etc.
Ar35247251
The document discusses the applications of robotics in medicine. It describes how robotic surgery can accomplish tasks with more precision and repeatability than human surgeons. Robots are being used for minimally invasive surgeries of the heart, brain, spine, and other areas. The document also discusses how surgical planning works using imaging and 3D modeling to plan robotic procedures. It explains the registration process that aligns the robotic system to the patient. Finally, it briefly discusses developing technologies like nanorobotics and potential future applications.
Designing a suitable robotic arm for loading and unloading of material on lat...
The document describes the design of a robotic arm to automatically load and unload workpieces on a lathe machine. The robotic arm would be mounted on a movable table attached to the lathe. It was designed using CAD software and simulated using workspace simulation software. The robotic arm has a 7-axis configuration including a gripper with dual four-fingered hands to load and unload workpieces simultaneously, increasing productivity. An electric drive system is proposed to power the robotic arm for its light loading tasks. The design aims to reduce non-operation time on the lathe and allow one person to manage multiple machines.
Shamira-IIECE.pptx
This paper describes the hardware system of a socially interactive robot called Quori. Quori consists of an upper humanoid body with a rear projection and two gesturing arms mounted on a holonomic mobile base. The base allows for omnidirectional movement up to 0.8 m/s. Sensors like a laser range finder and cameras are used to sense the robot's internal state and environment. The design aims to create a low-cost, modular robot platform with maximum functionality for social interaction research.
Human–Robot Interaction: Status and Challenges. Sheridan MIT
Human–Robot Interaction: Status and Challenges
Thomas B. Sheridan, Massachusetts Institute of Technology, Cambridge Human factors
Reptile robot
The document outlines the design of a snake robot with the following key points:
1. It proposes designing a snake robot without wheels that uses 8 servo motors and an Arduino microcontroller for locomotion on rough terrain.
2. The robot will be 3D modeled and simulated in MATLAB and Solidworks before hardware implementation.
3. The aims are to study robot kinematics and mechanics, implement hardware and software, and understand locomotion to move like a snake.
4. Expected outcomes include uses for the robot in industries like inspection, rescue missions where it can access hard to reach places, and for military surveillance.
introduction to Robotics (the role of computer science)
This document provides an introduction to robotics, including definitions of robotics, the history of robots from the first industrial robot installed in 1961 through current generations, and types of robots such as pre-programmed, humanoid, autonomous, teleoperated, and augmenting robots. It also discusses how computer science relates to robots through areas like artificial intelligence and sensor processing, and gives examples of applications of current and future robots in areas like medical care, bomb disposal, transportation, exploration, and more.
Worldwide Snake Robots Market 2013 to 2019:Industry Analysis Report
Snake Robots Market Shares, Strategies, and Forecasts, Worldwide, 2013 to 2019 @ http://www.researchmoz.us/snake-robots-market-shares-strategies-and-forecasts-worldwide-2013-to-2019-report.html
TECHNICAL SEMINAR.pptx
This document provides a summary of a technical seminar presentation on multi-robot systems for space applications. The presentation covered topics including what space robots are, why they are used, examples of multi-robot systems, how path planning algorithms work, the key technologies used in space robots, a proposed multi-robot system architecture, the importance of space robots, types of space robots, and future space missions that will utilize robotics. The presentation provided information on space robots through diagrams, flow charts, and explanations of concepts like sensing, planning, control and execution in multi-robot systems.
Design and Analysis of a Multi Fingered Gripper for Grasping Irregular Objects
This document describes the design and analysis of a multi-fingered gripper for grasping irregular objects. The gripper was designed using Pro-E and ANSYS software and aims to grasp objects of various shapes, sizes and weights using a minimum number of actuators. Kinematic and dynamic analyses of the gripper were performed to support the novel design. The gripper is intended to have applications as a robot end effector or prosthetic hand. It uses a simple linkage mechanism and pneumatic actuation for the fingers to grasp irregularly shaped objects, mimicking the grasping ability of the human hand.
humanoid_robots_final.ppt
The document provides an overview of human-robot interaction. It discusses how robots can interact with humans through touch, vision, speech recognition, robotic voice, gestures, facial expressions, artificial emotions, and personality. Various techniques for developing robotics are also covered, such as evolutionary robotics and developmental robotics. The document outlines projections for integration of robots into households, organizations and jobs over the next few decades from sources like the South Korean and Japanese governments and private companies. It also notes potential issues like robots demanding rights or straining resources that could arise if development and use of robots accelerates rapidly.
humanoid_robots_final.pptx
Riya Maitra's presentation discusses human emotions in robots. It provides definitions of robots and robotics, describes different types of robots including industrial, humanoid, and social robots. It explains how robots interact with humans through touch, vision, speech recognition, gestures, facial expressions and artificial emotions. The presentation outlines techniques for developing robotics like evolutionary robotics and developmental robotics. It presents projections for incorporating robots in households, manufacturing, healthcare and military between now and 2050. In conclusion, it notes robots could one day demand rights and their rise strains resources and environment, though the technology could also be misused destructively.
Humanoid robot
This document presents information about humanoid robots. It was presented by Som Mishra, a third year electronics and communication engineering student at BIET Jhansi, under the guidance of Dr. D.K. Srivastava. The document discusses the introduction of humanoid robots, their purposes, key components like sensors and actuators, types including wheeled and biped robots, advantages like ability to perform tasks without complaints, and disadvantages such as high costs. It concludes that robotics is still a developing field with potential for new applications.
Military Robots
The document discusses the need for and types of military robots. It describes examples like the MQ1-Predator drone and BIGDOG quadruped robot. The document outlines research objectives like developing more autonomous robots that can help soldiers with dangerous tasks. Challenges include communication, power storage, navigation, and dexterous manipulation. Near-future applications may include exoskeletons to augment a soldier's abilities.
MaartenDekker_Mechanical_design_of_a_humanoid_robots_lower_body
A new mechanical design is proposed for a humanoid robot's lower body that improves walking and posture dynamics over an existing robot called TUlip. The new design aims to create a lower body that is more human-like, with a waist, upper legs, lower legs and feet that have a redundant and human-like kinematic configuration of 16 degrees of freedom. Each leg will consist of five degrees of freedom and the waist section will consist of six degrees of freedom. The actuations are designed to be stiff, backdrivable with minimal backlash and capable of providing adequate torque for the joints. The result is intended to be a humanoid lower body with a more human-like configuration, link dimensions, link masses and range of
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...Association of Scientists, Developers and Faculties
A prosthetic is a device that replaces any missing human body part visibly and functionally. Reverse engineering is a field of engineering wherein a model and further a prototype can be generated by extracting information from previous design or available model using the advanced tools of CAD/CAM. This paper aims at exploring the needs and advantages of connecting the prosthetic industry with reverse engineering in a developing country like India for patients with lower limb amputations under the brimming concept of “Make in India”.Robotics and ai
This presentation provides an overview of robotics and AI. It defines a robot as a machine that can sense its environment, think to follow instructions, and act. Current developments include robots that can perform surgery, explore hazardous areas, and recognize faces and objects. Industrial and manufacturing robots are widely used today. Issues include robots being unable to handle unexpected situations and potentially increasing unemployment, though future developments may focus on greater intelligence, learning ability, and human-friendly design.
Advancement in robotics
This document discusses various types and applications of robots. It describes industrial robots, military robots, aerospace robots, and healthcare robots. It provides details on articulated, SCARA, Delta, and Cartesian robots used for material handling, processing, assembly, inspection, and other industrial applications. The document also discusses military robots used for clearing minefields and deactivating bombs. Aerospace robots are discussed for space exploration. Healthcare robots include magnetic microbots for medical procedures. Examples of military robots include Dragon Runner, TALON, ACER, and Packbot. The document also summarizes humanoid robots, swarm robots, prosthetics, neural networks, and prediction robots.
Similar to MIT Poster (20)
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
Designing a suitable robotic arm for loading and unloading of material on lat...
Designing a suitable robotic arm for loading and unloading of material on lat...
Human–Robot Interaction: Status and Challenges. Sheridan MIT
Human–Robot Interaction: Status and Challenges. Sheridan MIT
introduction to Robotics (the role of computer science)
introduction to Robotics (the role of computer science)
Worldwide Snake Robots Market 2013 to 2019:Industry Analysis Report
Worldwide Snake Robots Market 2013 to 2019:Industry Analysis Report
Design and Analysis of a Multi Fingered Gripper for Grasping Irregular Objects
Design and Analysis of a Multi Fingered Gripper for Grasping Irregular Objects
MaartenDekker_Mechanical_design_of_a_humanoid_robots_lower_body
MaartenDekker_Mechanical_design_of_a_humanoid_robots_lower_body
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...
Application of Reverse Engineering and CAD/CAM in Field of Prosthetics-A Make...
More from Jairo Maldonado-Contreras
CV
Jairo Maldonado-Contreras is a mechanical engineering student at California State University Long Beach with extensive research experience in robotics. He has interned at NASA JPL, MIT, and Northwestern University researching topics like hybrid vehicles, prosthetics, and community mobility monitoring. Maldonado-Contreras maintains a 3.62 GPA and has presented his work at several conferences, including IEEE EMBC and SHPE National. Upon graduation, he intends to pursue a PhD in robotics.
49er Magazine Interview
I was selected by CSULB's 49er Magazine to tell my story of success in the face of adversity, and how the BESST program played an important part in that success.
CAMP Student of the Year
Jairo Maldonado-Contreras is a relentless student pursuing a degree in mechanical engineering with a minor in applied mathematics. He witnessed his mother work tirelessly as a single parent to provide for their family, which inspired him to pursue higher education in order to help his mother and pursue an interest in science. He is currently involved in research in rehabilitation technologies and has promoted STEM education, and aims to obtain a PhD in biomechanics. He credits programs like CAMP for their support in helping him achieve his goals.
Research info session
Powerpoint slides I co-presented to a group of freshman to inform them of about research and career in research.
EMBC Paper
This document describes design improvements made to a vibrotactile device used to provide tactile feedback to individuals with lower-limb prosthetics. Based on a pilot study, smaller and stronger vibration motors were selected, goniometers were replaced with IMUs for improved gait detection, and radio frequency was used for synchronization. The device housing was changed to a clamp design and voltage converters were added to power components from a single battery. These modifications aimed to improve the device's accuracy, efficiency, ease of use, and compactness.
EMBC PPT
The document describes design improvements made to a vibrotactile device intended to enhance rehabilitation training for persons with lower-limb amputations. The original device used vibrating motors and a solenoid to create sensations during gait and a sensor to measure knee angle. The improvements included modifying the housing of the motors and solenoid for increased versatility and adding an LCD screen interface on the control unit. Future work will test the functionality of the new designs using motion analysis systems.
Matlab Workshop Presentation
MATLAB is a programming language for technical computing and data analysis. It allows users to perform arithmetic operations, use mathematical functions, manipulate data, create plots and graphs, write programs using conditional statements and loops. The document provides an overview of MATLAB's interface and important terms, and demonstrates how to perform common tasks like creating arrays and matrices, plotting data, writing for and while loops, and defining functions. MATLAB is relevant for tasks in many engineering fields like signal processing, optimization, finite element analysis, and statistical analysis.
Senior Design Poster
The document describes an automated thermocouple assembly machine designed by a senior design group to address the needs of Dickson Testing Company and Aerocraft Heat Treating Company. The machine feeds ceramic beads onto wires to create 3-foot long thermocouples using four subsystems: a step feeder to store and feed beads, a sorter to orient the beads, a 3-foot channel and guide to move the beads along the wires, and a wire spindle system to feed the wires. The total cost of the machine was $950 and it was designed to complete the thermocouple assembly process with little human interaction in a streamlined and economical manner.
HI-POCT Conference Paper
This study developed a vibrotactile device to train lower-limb amputees' ability to respond to perturbations and conducted a pilot study to test its effectiveness. Two subjects performed standing and walking tasks with and without the device at baseline and after training. In standing tasks, both subjects improved their response times, with the subject receiving external focus training instructions improving more. In walking tasks, both subjects increased their rate of making correct movements in response to stimuli. While preliminary, the results suggest vibrotactile training may improve proprioceptive abilities and that external focus instructions may further enhance motor learning. The study also identified areas for improving the device design and protocols.
Northwestern University Research Poster
This document describes a study that aimed to use smartphone technology to measure community mobility and clinical predictors of mobility recovery in stroke patients. The study involved collecting smartphone sensor data including GPS coordinates over 3 months from 4 stroke patients. Two measures of mobility were calculated from the GPS data - percentage of time spent at home and average daily distance traveled. The data was analyzed to investigate correlations between these mobility measures and clinical outcomes like walking tests and depression scores. Preliminary trends identified percentage of time spent at home as relating to some clinical outcomes like slower walking speeds and lower balance confidence.
Northwestern University Research PPT
This document describes a study that aims to develop an algorithm to accurately identify the activities of persons with stroke in the community using smartphone technology. The study will monitor 6 activities - standing, walking, lying, sitting, stairs up, and stairs down. Participants will carry smartphones continuously recording activity measurements over 3 months. Data analysis will teach the algorithm to identify activities and track community mobility using GPS. The study expects to improve at-home activity recognition and gain insight into how socioeconomic factors affect post-stroke mobility. Limitations include potential GPS and data collection errors.
EMBC Poster
This document describes improvements made to a vibrotactile device used in rehabilitation training for persons with lower-limb amputations. The original device generated vibrations to simulate tactile feedback during ambulation but pilot studies showed it could be improved. Design modifications included adding a clamp to more easily attach the device to prosthetics, using multiple motor types to increase feedback strength, replacing sensors to more accurately measure gait, and modifying the actuation unit to provide stronger tactile feedback. These improvements aim to enhance the device's functionality for evaluating motor control in rehabilitation experiments.
HI-POCT Conference PowerPoint Presentation
I presented my research findings to an audience of professionals at the annual HI-POCT Conference.
- November 7, 2017
More from Jairo Maldonado-Contreras (13)
Recently uploaded
Null Bangalore | Pentesters Approach to AWS IAM
#Abstract:
- Learn more about the real-world methods for auditing AWS IAM (Identity and Access Management) as a pentester. So let us proceed with a brief discussion of IAM as well as some typical misconfigurations and their potential exploits in order to reinforce the understanding of IAM security best practices.
- Gain actionable insights into AWS IAM policies and roles, using hands on approach.
#Prerequisites:
- Basic understanding of AWS services and architecture
- Familiarity with cloud security concepts
- Experience using the AWS Management Console or AWS CLI.
- For hands on lab create account on [killercoda.com](https://killercoda.com/cloudsecurity-scenario/)
# Scenario Covered:
- Basics of IAM in AWS
- Implementing IAM Policies with Least Privilege to Manage S3 Bucket
- Objective: Create an S3 bucket with least privilege IAM policy and validate access.
- Steps:
- Create S3 bucket.
- Attach least privilege policy to IAM user.
- Validate access.
- Exploiting IAM PassRole Misconfiguration
-Allows a user to pass a specific IAM role to an AWS service (ec2), typically used for service access delegation. Then exploit PassRole Misconfiguration granting unauthorized access to sensitive resources.
- Objective: Demonstrate how a PassRole misconfiguration can grant unauthorized access.
- Steps:
- Allow user to pass IAM role to EC2.
- Exploit misconfiguration for unauthorized access.
- Access sensitive resources.
- Exploiting IAM AssumeRole Misconfiguration with Overly Permissive Role
- An overly permissive IAM role configuration can lead to privilege escalation by creating a role with administrative privileges and allow a user to assume this role.
- Objective: Show how overly permissive IAM roles can lead to privilege escalation.
- Steps:
- Create role with administrative privileges.
- Allow user to assume the role.
- Perform administrative actions.
- Differentiation between PassRole vs AssumeRole
Try at [killercoda.com](https://killercoda.com/cloudsecurity-scenario/)
Generative AI Use cases applications solutions and implementation.pdf
Generative AI solutions encompass a range of capabilities from content creation to complex problem-solving across industries. Implementing generative AI involves identifying specific business needs, developing tailored AI models using techniques like GANs and VAEs, and integrating these models into existing workflows. Data quality and continuous model refinement are crucial for effective implementation. Businesses must also consider ethical implications and ensure transparency in AI decision-making. Generative AI's implementation aims to enhance efficiency, creativity, and innovation by leveraging autonomous generation and sophisticated learning algorithms to meet diverse business challenges.
https://www.leewayhertz.com/generative-ai-use-cases-and-applications/
一比一原版(uofo毕业证书)美国俄勒冈大学毕业证如何办理
原版一模一样【微信:741003700 】【(uofo毕业证书)美国俄勒冈大学毕业证成绩单】【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
办理(uofo毕业证书)美国俄勒冈大学毕业证【微信:741003700 】外观非常简单,由纸质材料制成,上面印有校徽、校名、毕业生姓名、专业等信息。
办理(uofo毕业证书)美国俄勒冈大学毕业证【微信:741003700 】格式相对统一,各专业都有相应的模板。通常包括以下部分:
校徽:象征着学校的荣誉和传承。
校名:学校英文全称
授予学位:本部分将注明获得的具体学位名称。
毕业生姓名:这是最重要的信息之一,标志着该证书是由特定人员获得的。
颁发日期:这是毕业正式生效的时间,也代表着毕业生学业的结束。
其他信息:根据不同的专业和学位,可能会有一些特定的信息或章节。
办理(uofo毕业证书)美国俄勒冈大学毕业证【微信:741003700 】价值很高,需要妥善保管。一般来说,应放置在安全、干燥、防潮的地方,避免长时间暴露在阳光下。如需使用,最好使用复印件而不是原件,以免丢失。
综上所述,办理(uofo毕业证书)美国俄勒冈大学毕业证【微信:741003700 】是证明身份和学历的高价值文件。外观简单庄重,格式统一,包括重要的个人信息和发布日期。对持有人来说,妥善保管是非常重要的。
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
Computational Engineering IITH Presentation
This Presentation will give you a brief idea about what Computational Engineering at IIT Hyderabad has to offer.
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Sinan from the Delivery Hero mobile infrastructure engineering team shares a deep dive into performance acceleration with Gradle build cache optimizations. Sinan shares their journey into solving complex build-cache problems that affect Gradle builds. By understanding the challenges and solutions found in our journey, we aim to demonstrate the possibilities for faster builds. The case study reveals how overlapping outputs and cache misconfigurations led to significant increases in build times, especially as the project scaled up with numerous modules using Paparazzi tests. The journey from diagnosing to defeating cache issues offers invaluable lessons on maintaining cache integrity without sacrificing functionality.
Advanced control scheme of doubly fed induction generator for wind turbine us...
This paper describes a speed control device for generating electrical energy on an electricity network based on the doubly fed induction generator (DFIG) used for wind power conversion systems. At first, a double-fed induction generator model was constructed. A control law is formulated to govern the flow of energy between the stator of a DFIG and the energy network using three types of controllers: proportional integral (PI), sliding mode controller (SMC) and second order sliding mode controller (SOSMC). Their different results in terms of power reference tracking, reaction to unexpected speed fluctuations, sensitivity to perturbations, and resilience against machine parameter alterations are compared. MATLAB/Simulink was used to conduct the simulations for the preceding study. Multiple simulations have shown very satisfying results, and the investigations demonstrate the efficacy and power-enhancing capabilities of the suggested control system.
原版制作(Humboldt毕业证书)柏林大学毕业证学位证一模一样
原件一模一样【微信:bwp0011】《(Humboldt毕业证书)柏林大学毕业证学位证》【微信:bwp0011】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问微bwp0011
【主营项目】
一.毕业证【微bwp0011】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【微bwp0011】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
Digital Twins Computer Networking Paper Presentation.pptx
A Digital Twin in computer networking is a virtual representation of a physical network, used to simulate, analyze, and optimize network performance and reliability. It leverages real-time data to enhance network management, predict issues, and improve decision-making processes.
Rainfall intensity duration frequency curve statistical analysis and modeling...
Using data from 41 years in Patna’ India’ the study’s goal is to analyze the trends of how often it rains on a weekly, seasonal, and annual basis (1981−2020). First, utilizing the intensity-duration-frequency (IDF) curve and the relationship by statistically analyzing rainfall’ the historical rainfall data set for Patna’ India’ during a 41 year period (1981−2020), was evaluated for its quality. Changes in the hydrologic cycle as a result of increased greenhouse gas emissions are expected to induce variations in the intensity, length, and frequency of precipitation events. One strategy to lessen vulnerability is to quantify probable changes and adapt to them. Techniques such as log-normal, normal, and Gumbel are used (EV-I). Distributions were created with durations of 1, 2, 3, 6, and 24 h and return times of 2, 5, 10, 25, and 100 years. There were also mathematical correlations discovered between rainfall and recurrence interval.
Findings: Based on findings, the Gumbel approach produced the highest intensity values, whereas the other approaches produced values that were close to each other. The data indicates that 461.9 mm of rain fell during the monsoon season’s 301st week. However, it was found that the 29th week had the greatest average rainfall, 92.6 mm. With 952.6 mm on average, the monsoon season saw the highest rainfall. Calculations revealed that the yearly rainfall averaged 1171.1 mm. Using Weibull’s method, the study was subsequently expanded to examine rainfall distribution at different recurrence intervals of 2, 5, 10, and 25 years. Rainfall and recurrence interval mathematical correlations were also developed. Further regression analysis revealed that short wave irrigation, wind direction, wind speed, pressure, relative humidity, and temperature all had a substantial influence on rainfall.
Originality and value: The results of the rainfall IDF curves can provide useful information to policymakers in making appropriate decisions in managing and minimizing floods in the study area.
Data Driven Maintenance | UReason Webinar
Discover the latest insights on Data Driven Maintenance with our comprehensive webinar presentation. Learn about traditional maintenance challenges, the right approach to utilizing data, and the benefits of adopting a Data Driven Maintenance strategy. Explore real-world examples, industry best practices, and innovative solutions like FMECA and the D3M model. This presentation, led by expert Jules Oudmans, is essential for asset owners looking to optimize their maintenance processes and leverage digital technologies for improved efficiency and performance. Download now to stay ahead in the evolving maintenance landscape.
LLM Fine Tuning with QLoRA Cassandra Lunch 4, presented by Anant
Slides for the 4th Presentation on LLM Fine-Tuning with QLoRA Presented by Anant, featuring DataStax Astra
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows
一比一原版(osu毕业证书)美国俄勒冈州立大学毕业证如何办理
原版一模一样【微信:741003700 】【(osu毕业证书)美国俄勒冈州立大学毕业证成绩单】【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】外观非常简单,由纸质材料制成,上面印有校徽、校名、毕业生姓名、专业等信息。
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】格式相对统一,各专业都有相应的模板。通常包括以下部分:
校徽:象征着学校的荣誉和传承。
校名:学校英文全称
授予学位:本部分将注明获得的具体学位名称。
毕业生姓名:这是最重要的信息之一,标志着该证书是由特定人员获得的。
颁发日期:这是毕业正式生效的时间,也代表着毕业生学业的结束。
其他信息:根据不同的专业和学位,可能会有一些特定的信息或章节。
办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】价值很高,需要妥善保管。一般来说,应放置在安全、干燥、防潮的地方,避免长时间暴露在阳光下。如需使用,最好使用复印件而不是原件,以免丢失。
综上所述,办理(osu毕业证书)美国俄勒冈州立大学毕业证【微信:741003700 】是证明身份和学历的高价值文件。外观简单庄重,格式统一,包括重要的个人信息和发布日期。对持有人来说,妥善保管是非常重要的。
Recently uploaded (20)
1FIDIC-CONSTRUCTION-CONTRACT-2ND-ED-2017-RED-BOOK.pdf
1FIDIC-CONSTRUCTION-CONTRACT-2ND-ED-2017-RED-BOOK.pdf
Generative AI Use cases applications solutions and implementation.pdf
Generative AI Use cases applications solutions and implementation.pdf
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
IEEE Aerospace and Electronic Systems Society as a Graduate Student Member
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Optimizing Gradle Builds - Gradle DPE Tour Berlin 2024
Advanced control scheme of doubly fed induction generator for wind turbine us...
Advanced control scheme of doubly fed induction generator for wind turbine us...
Digital Twins Computer Networking Paper Presentation.pptx
Digital Twins Computer Networking Paper Presentation.pptx
Rainfall intensity duration frequency curve statistical analysis and modeling...
Rainfall intensity duration frequency curve statistical analysis and modeling...
LLM Fine Tuning with QLoRA Cassandra Lunch 4, presented by Anant
LLM Fine Tuning with QLoRA Cassandra Lunch 4, presented by Anant
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
2008 BUILDING CONSTRUCTION Illustrated - Ching Chapter 08 Doors and Windows.pdf
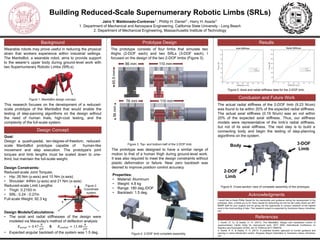
MIT Poster
- 1. Building Reduced-Scale Supernumerary Robotic Limbs (SRLs) Jairo Y. Maldonado-Contreras " , Phillip H. Daniel # , Harry H. Asada # 1. Department of Mechanical and Aerospace Engineering, California State University - Long Beach 2. Department of Mechanical Engineering, Massachusetts Institute of Technology Background Wearable robots may prove useful in reducing the physical strain that workers experience within industrial settings. The MantisBot, a wearable robot, aims to provide support to the wearer’s upper body during ground-level work with two Supernumerary Robotic Limbs (SRLs). This research focuses on the development of a reduced- scale prototype of the MantisBot that would enable the testing of step-panning algorithms on the design without the need of human trials, high-cost testing, and the complexity of the full-scale system. Figure 1. MantisBot design concept. Design Concept Goal: Design a quadrupedal, ten-degree-of-freedom, reduced- scale MantisBot prototype capable of human-like movement and step execution. The prototype's joint torques and limb lengths must be scaled down to one- third, but maintain the full-scale weight. Design Constraints: Reduced-scale Joint Torques: • Hip: 26 Nm (y-axis) and 10 Nm (x-axis) • Shoulder: 44Nm (y-axis) and 21 Nm (x-axis) Reduced-scale Limb Lengths: • Thigh: 0.2193 m • SRL: 0.24 - 0.27m Full-scale Weight: 92.3 kg Design Models/Calculations: • The axial and radial stiffnesses of the design were modeled via Macaulay's method of deflection analysis 𝐾%&'%( = 0.47 . /0 & 𝐾1%2'%( = 11.48 . /0 • Expected angular backlash of the system was 1.5 deg. Prototype Design The prototype consists of four limbs that simulate two thighs (2-DOF each) and two SRLs (3-DOF each). I focused on the design of the two 2-DOF limbs (Figure 3). Results Conclusion and Future Work Acknowledgments 110 mm 110 mm 65.5mm56mm 86 mm 76 mm Figure 3. Top- and bottom-half of the 2-DOF limb. 1. Kurek, D. A., & Asada, H. H. (2017). The MantisBot: Design and impedance control of supernumerary robotic limbs for near-ground work. 2017 IEEE International Conference on Robotics and Automation (ICRA). doi:10.1109/icra.2017.7989700 2. Daniel, P. H. & Asada, H. H. (2017). A potential function approach to human guidance and warning in active Mantis-Bot control. Progress Report Submitted to Sumitomo Heavy Industries, Ltd. References I would like to thank Phillip Daniel for his mentorship and guidance during the development of the prototype. Also, a thank you to Dr. Harry Asada for welcoming me into his lab Lastly, thank you MIT MSRP staff for your support and for giving me the opportunity to conduct research at the highest level in the most exciting of labs. This research project is supported by Sumitomo Heavy Industries, Ltd. The prototype was designed to have a similar range of motion to that of a human thigh during ground-level work. It was also required to meet the design constraints without plastic deformation or failure. Near zero backlash was desired to improve position control accuracy. The actual radial stiffness of the 2-DOF limb (9.23 N/um) was found to be within 20% of the expected radial stiffness. The actual axial stiffness (0.19 N/um) was an not within 20% of the expected axial stiffness. Thus, our stiffness models were representative of the limb’s radial stiffness, but not of its axial stiffness. The next step is to build a connecting body and begin the testing of step-planning algorithms on the system. Properties: • Material: Aluminum • Weight: 4.8 kg • Range: 180 deg./DOF • Backlash: 1.5 deg. Body 2-DOF Limb 3-DOF Limb Figure 5. Axial and radial stiffness data for the 2-DOF limb. Figure 6. Cross-section view of complete assembly of the prototype. Figure 4. 2-DOF limb complete assembly. Figure 2. Coordinate system