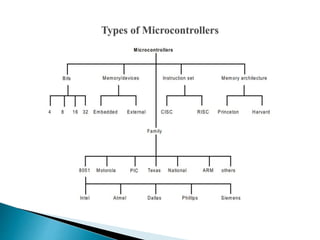
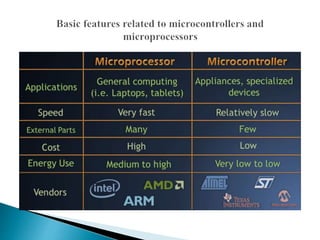
A microcontroller is an integrated circuit that can be programmed to control electronic devices. It contains a processor, memory, and input/output ports on a single chip. Microcontrollers come in various sizes based on their word length and internal bus width, from 4-bit to 32-bit. They also differ based on their memory architecture and instruction set. A microcontroller allows easy programming to control devices in embedded systems and provides advantages like low cost, small size, and flexibility.




































![Interactive spreadsheet basics[1]](https://cdn.slidesharecdn.com/ss_thumbnails/interactivespreadsheetbasics1-120226011905-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)