1. In the name of ALLAH ,the most BENEFICENT the most MERCIFUL
1-INSPIRATION
Usage of electronics and robotics in defense field
has gained a significance role all around the globe.
The emerging field requires extensive work in all
possible areas of electronics industry for the safety ,
prosperity and well being of human.
Following project may play a key role in live savings
from terrorist attacks, potential explosive formation
in certain industrial and domestic areas.
2-OBJECTIVE
Making a robot that is able to detect specific
metals(inductive ones i.e. iron, cobalt, nickel,
steel). On detection it alarms the user and stops
at the spot. It avoids non metallic hindrances
also.
4- DESCRIPTION
4.1-Micro Controller
A microcontroller (uC or MCU) is a small
computer on a single integrated circuit containing
a processor core, memory, and programmable
input/output peripherals.
Here using arduino Uno ( Atmega328) that is
controlling the motion of DC motors in
accordance with the signal from metal detection
circuit as well as the hindrance detection signal
from IR sensors.
4-2 Metal Detection
A metal detector is a device which responds to metal that may nit
be readily apparent. The simplest form of metal detector consist of
an oscillator producing an Alternating current that passes through a
coil producing an Alternating magnetic field. If a piece of metal(
conductive) metal is near to it , eddy current produces.so in that
way we can measure the difference of voltage .
For that purpose we are using IC op07 .
4-3 Infra -Red
Sensor
IR Sensors are position
detectors, that calculate
the distance by
throwing light from
Transmitter (LED) and
the receiver receives
that reflected light. On
the basis of change in
voltage level we can set
a criteria of distance.
4-4 Motor driver
To control the position
using L298D motor
driver.
It is a high voltage,
high current dual full-
bridge driver de-signed
to accept standard TTL
logic levels and drive
inductive loads such as
relays, solenoids, DC
and stepping motors.
5-RECOMMENDATION
This robot on this scale is just capable of detecting simple
inductive metals. It can be controlled by wireless and be sent in
non accessible areas by personnel or light vehicles. It can also be
used for surveying mines in suspected areas.
Also for more precision ultrasonic sensors can be used instead of
I-R sensors.
Bomb displacing function can also be installed to enhance the
overall output gained by a single machine unit.
Specifications:
Digital I/O pins > 14
Analog In pins > 6
SRAM > 2KB
EPROM > 1KB
Clock speed > 16MHz
ASHRAE ROBOTICS SECTION
UNIVERSITY OF ENGINEERING AND TECHNOLOGY LAHORE
Manager Ali Raza || Asst.Manager Muhammad Yasir Sarwar
UET LHR
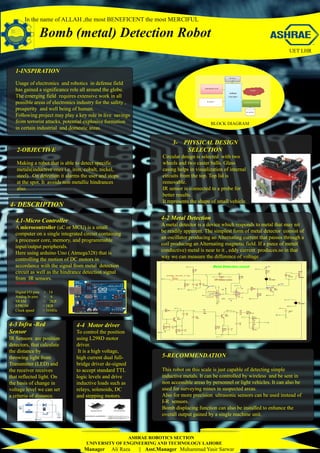
BLOCK DIAGRAM
3- PHYSICAL DESIGN
SELECTION
Circular design is selected with two
wheels and two caster balls. Glass
casing helps in visualization of internal
circuits from the top. Top lid is
removable.
IR sensor is connected to a probe for
better results.
It represents the shape of small vehicle.