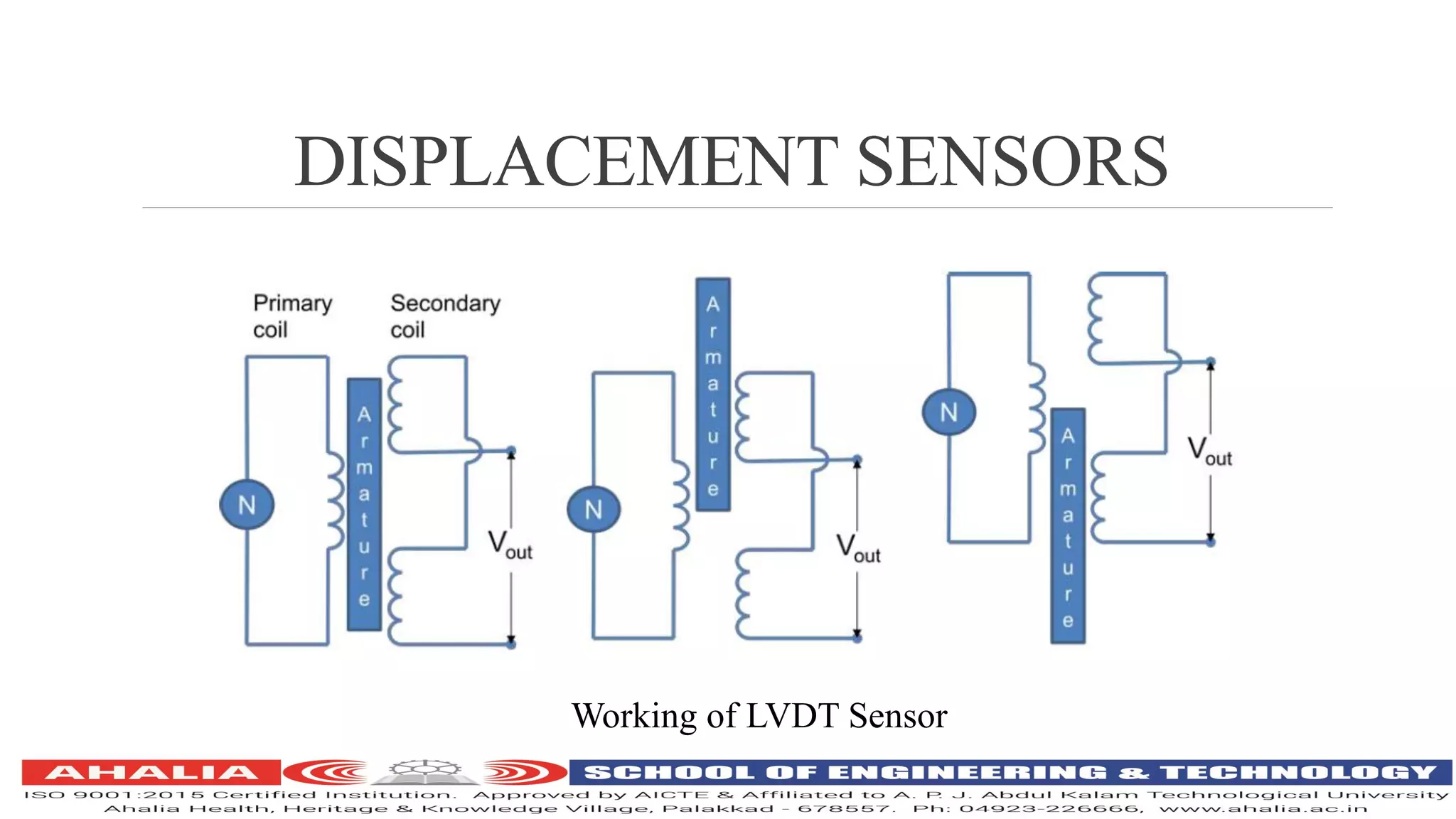
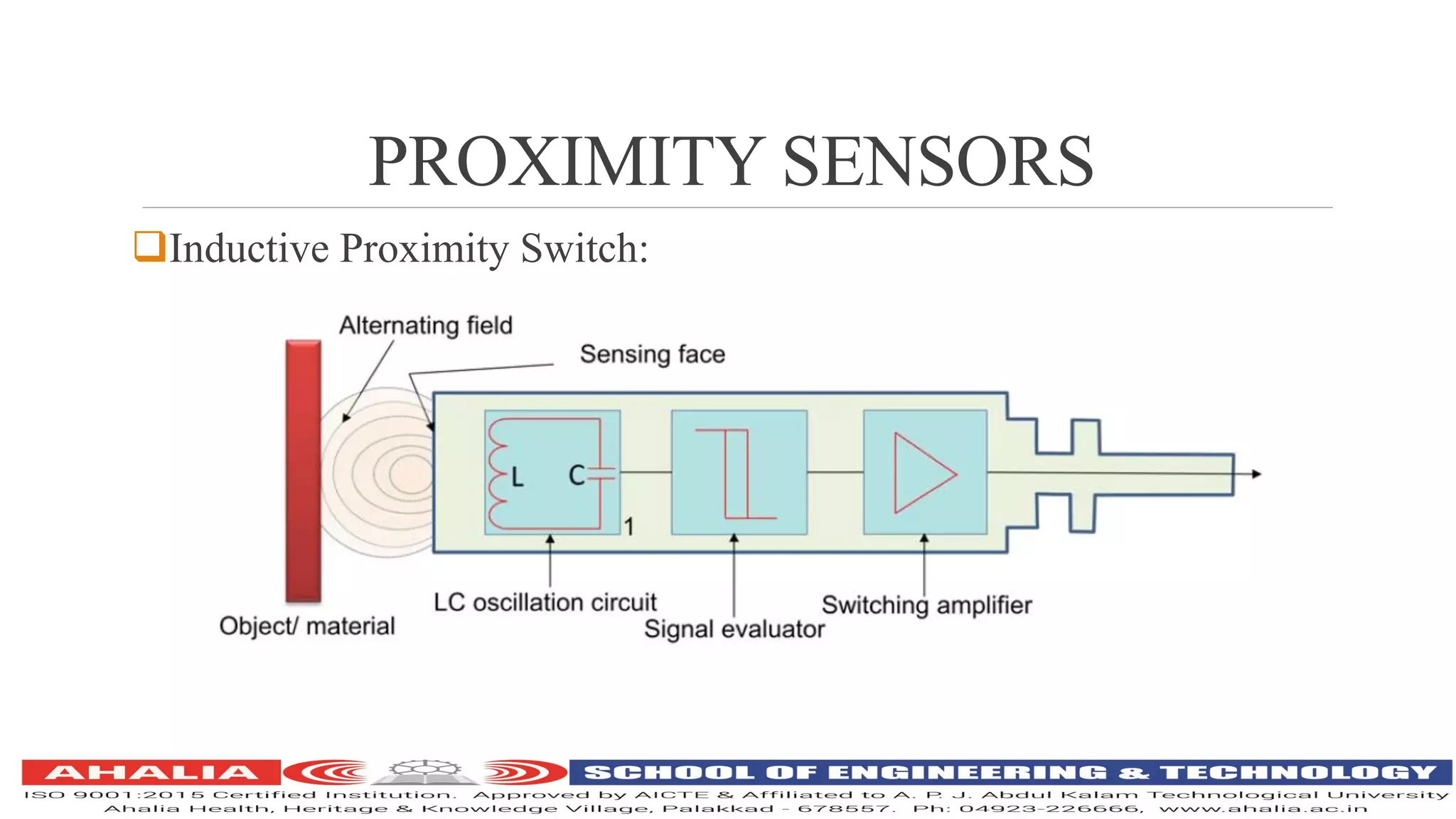
This document discusses different types of displacement, position, and proximity sensors. It describes various contact and non-contact sensors such as potentiometers, strain gauges, LVDTs, capacitive sensors, Hall effect sensors, optical encoders, eddy current sensors, inductive sensors and microswitches. It provides details on their working principles, construction, applications in automation, metrology and other fields. Selection of appropriate sensors depends on factors like required accuracy, resolution, displacement size and cost.