Downloaded 154 times













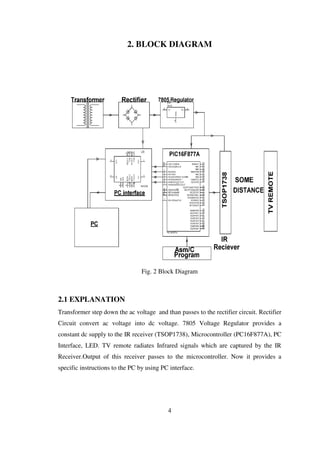
























































This document describes a major project submitted by four students to fulfill the requirements for a Bachelor of Engineering degree in Electronics and Communication. The project is about designing a TV remote to function as a cordless mouse for a computer. The remote would send infrared signals that are received by an IR sensor connected to a microcontroller. The microcontroller would then send the signals to the computer through a serial port to control mouse functions like cursor movement and clicks. The project aims to allow wireless mouse operation without sitting near the computer.





















































































