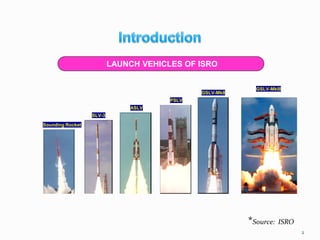
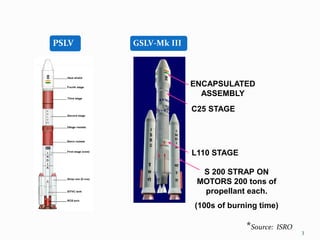
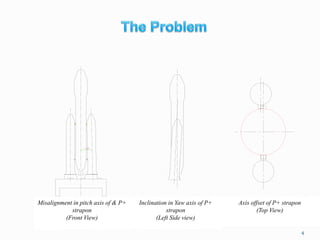
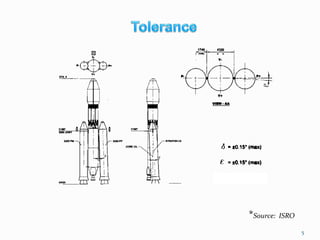
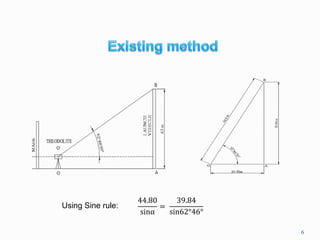
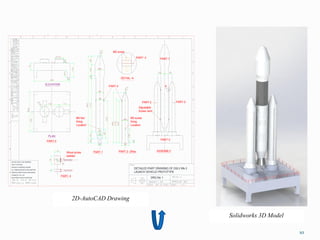
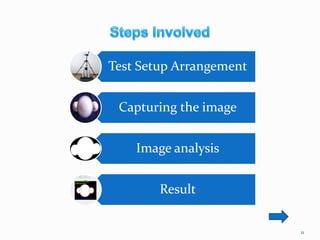
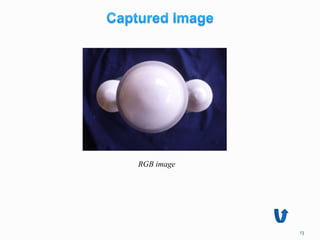
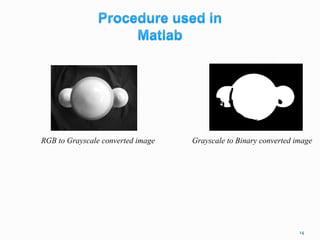
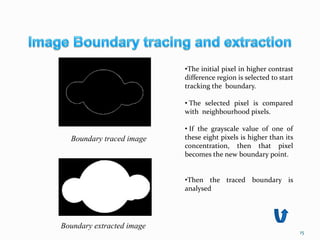
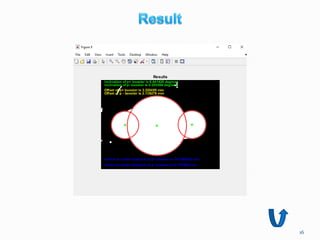
The document discusses a project aimed at utilizing machine vision techniques to detect alignment errors in space launch vehicles, specifically ISRO's GSLV Mk-III. It outlines the advantages of this method over traditional inspection approaches, including speed, accuracy, and the ability to monitor vehicle alignment continuously during operations. The project includes the creation of a prototype for testing and the use of CAD software for design and modeling.











































![Welcome to the New-Era in Automation]](https://cdn.slidesharecdn.com/ss_thumbnails/a73cde01-449f-4ab4-b012-7731e75ab889-160705040211-thumbnail.jpg?width=640&height=640&fit=bounds)





















![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)









