Downloaded 46 times
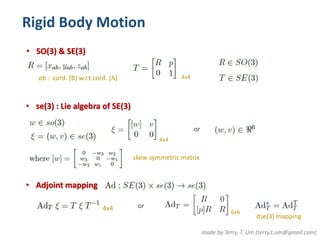
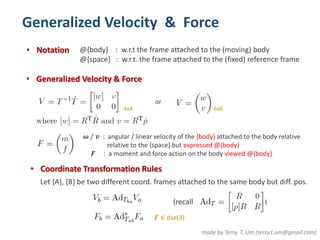
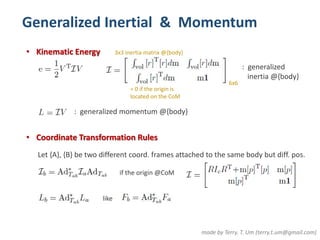
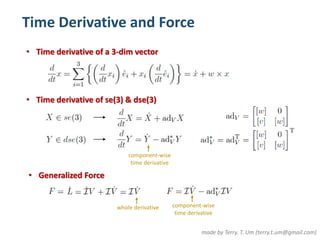
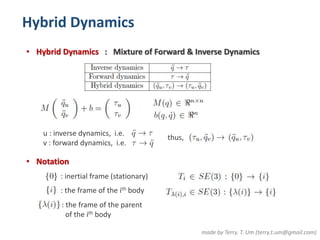

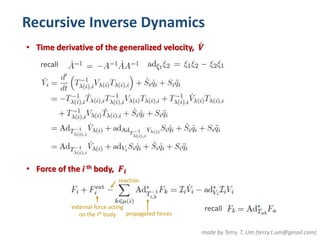
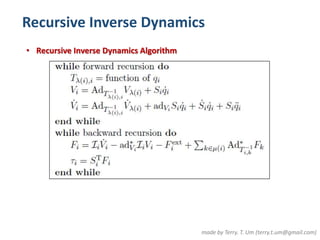
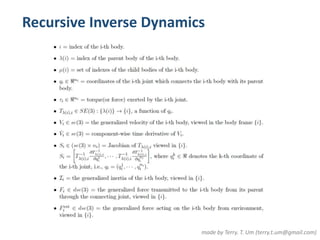
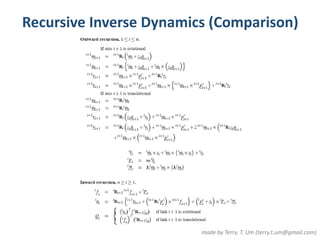
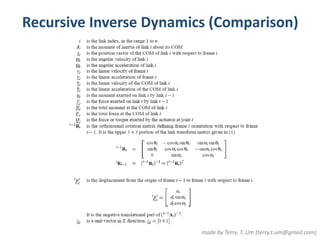

This document presents an overview of lie group formulations for robot mechanics. It discusses rigid body motion using SO(3) and SE(3) transformations. It also covers generalized velocity and force, dynamics of open chain systems, hybrid dynamics, and recursive inverse dynamics algorithms. The document is authored by Terry Taewoong Um from the University of Waterloo and is intended to summarize concepts from another source on lie group dynamics.












![[모두의연구소] 쫄지말자딥러닝](https://cdn.slidesharecdn.com/ss_thumbnails/20160528-160529034614-thumbnail.jpg?width=640&height=640&fit=bounds)