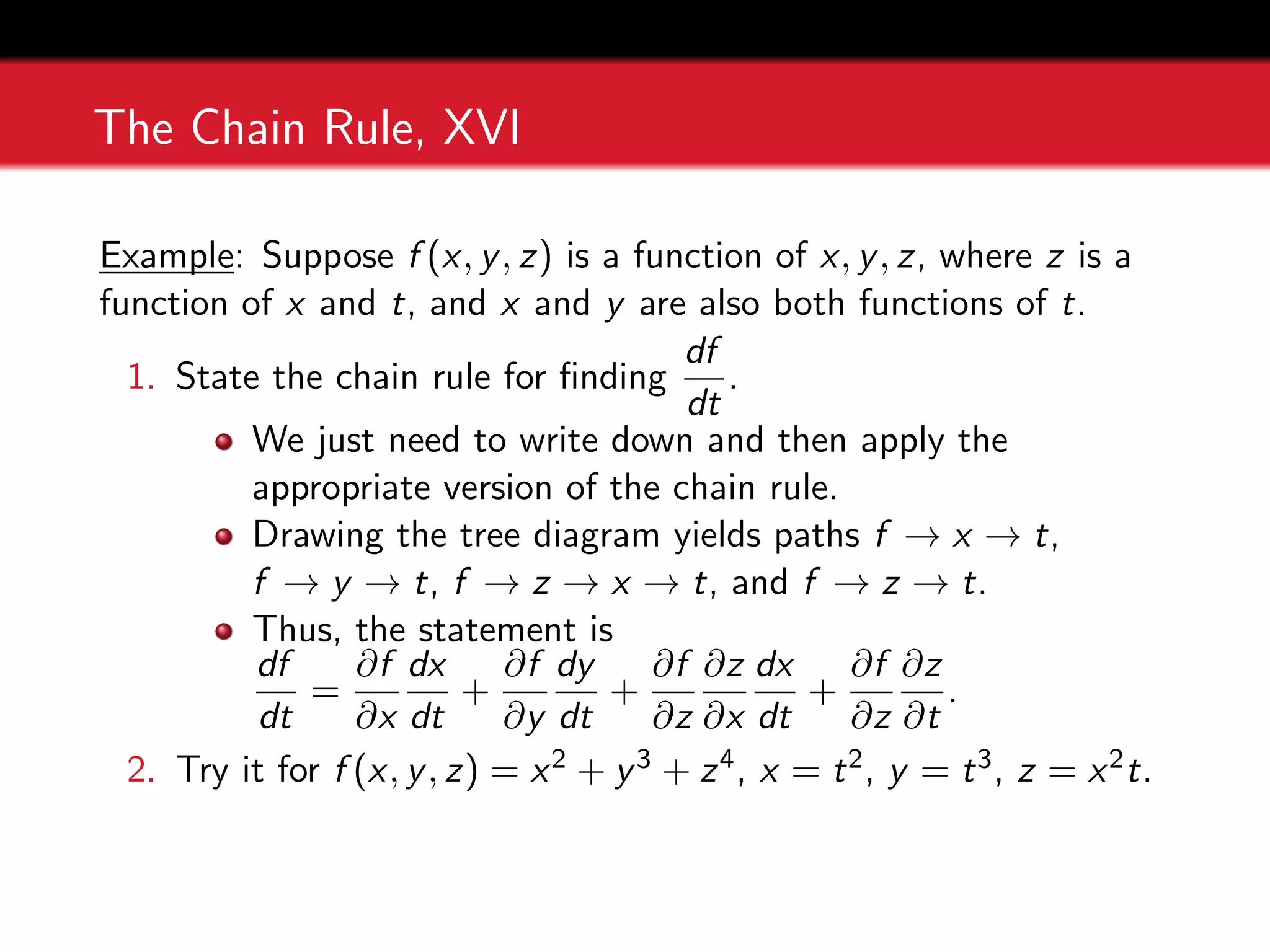
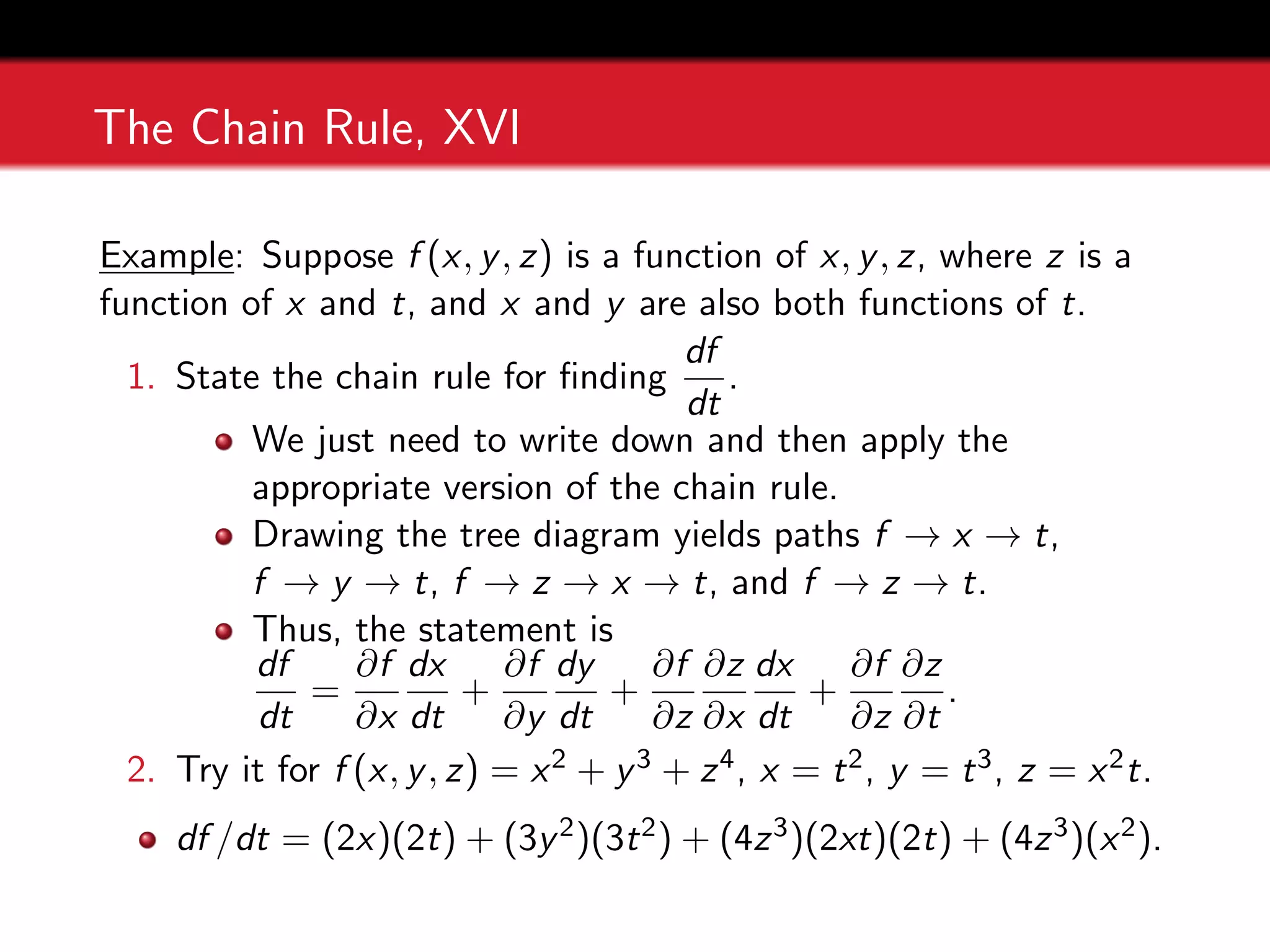
1. The document discusses the chain rule for functions of several variables. It provides examples of how to use a "tree diagram" to represent variable dependencies and derive the appropriate chain rule statement.
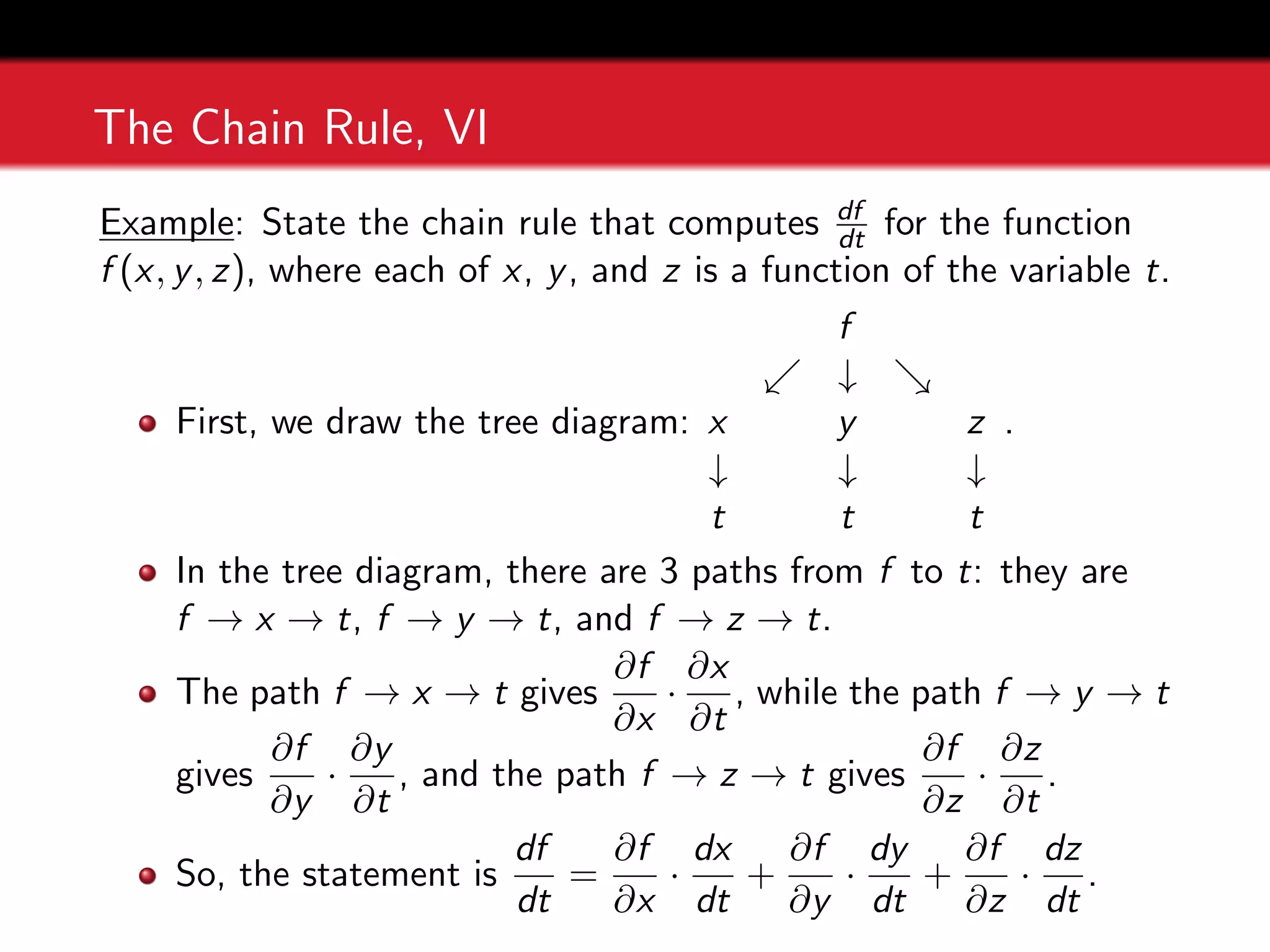
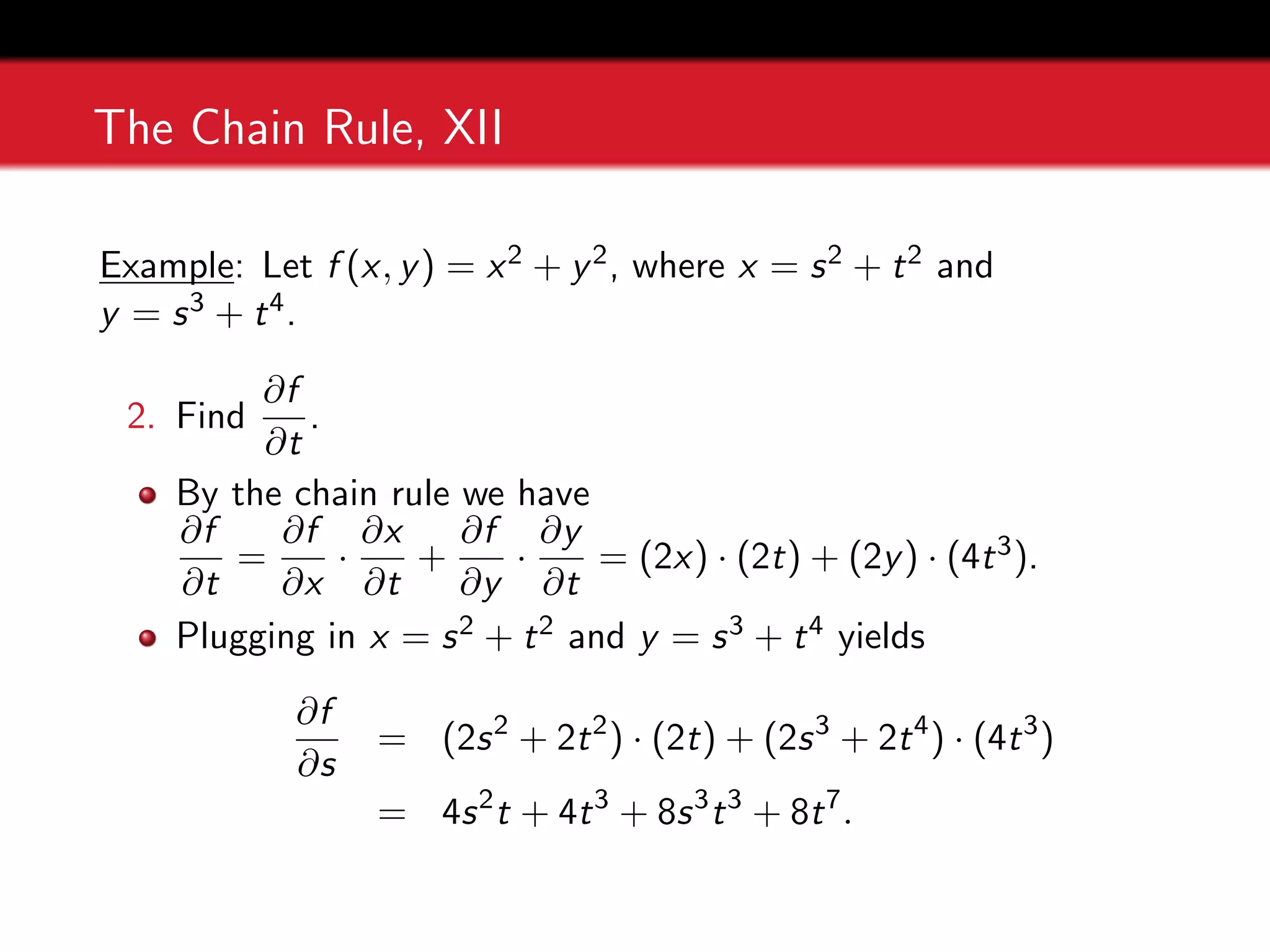
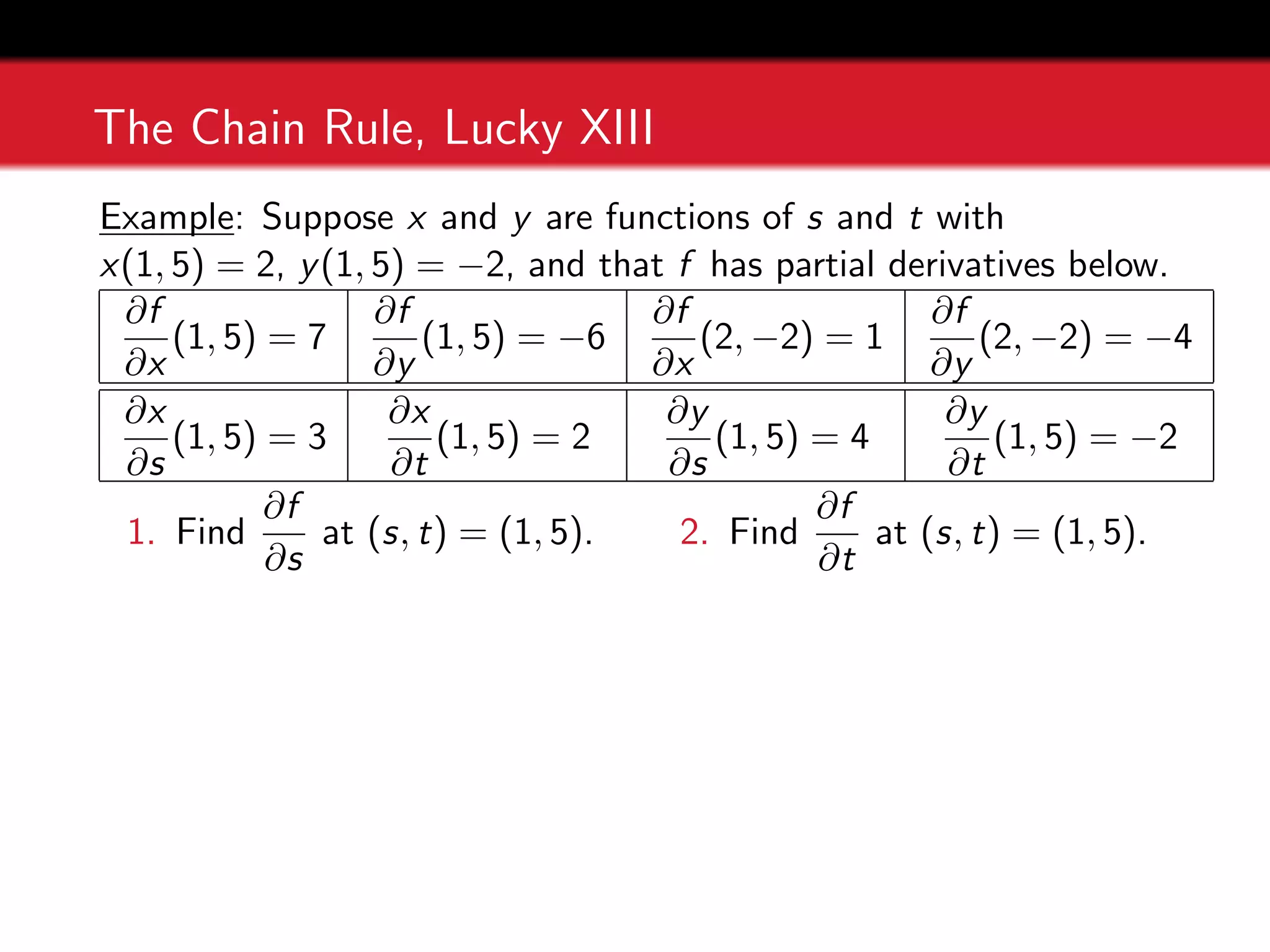
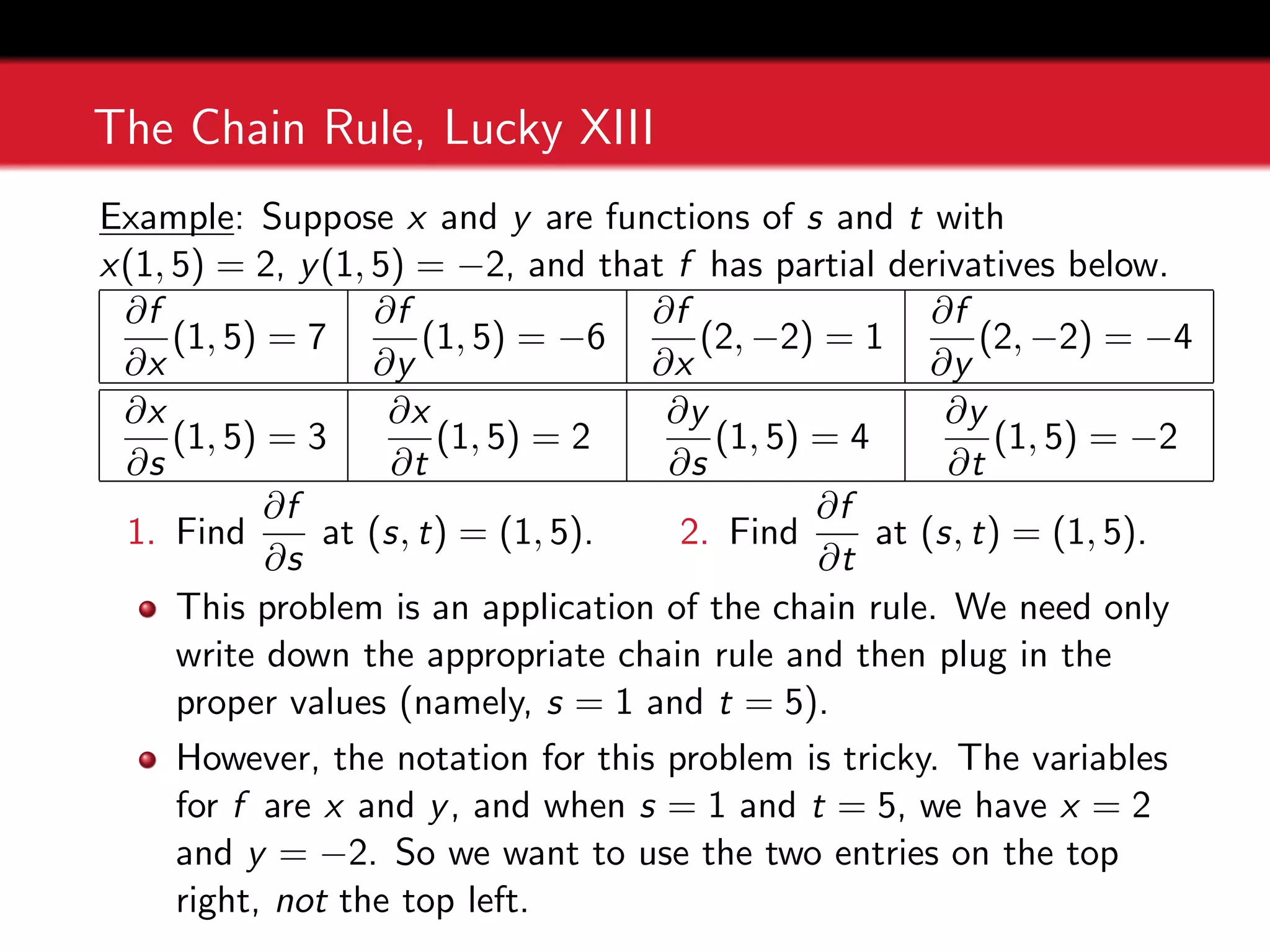
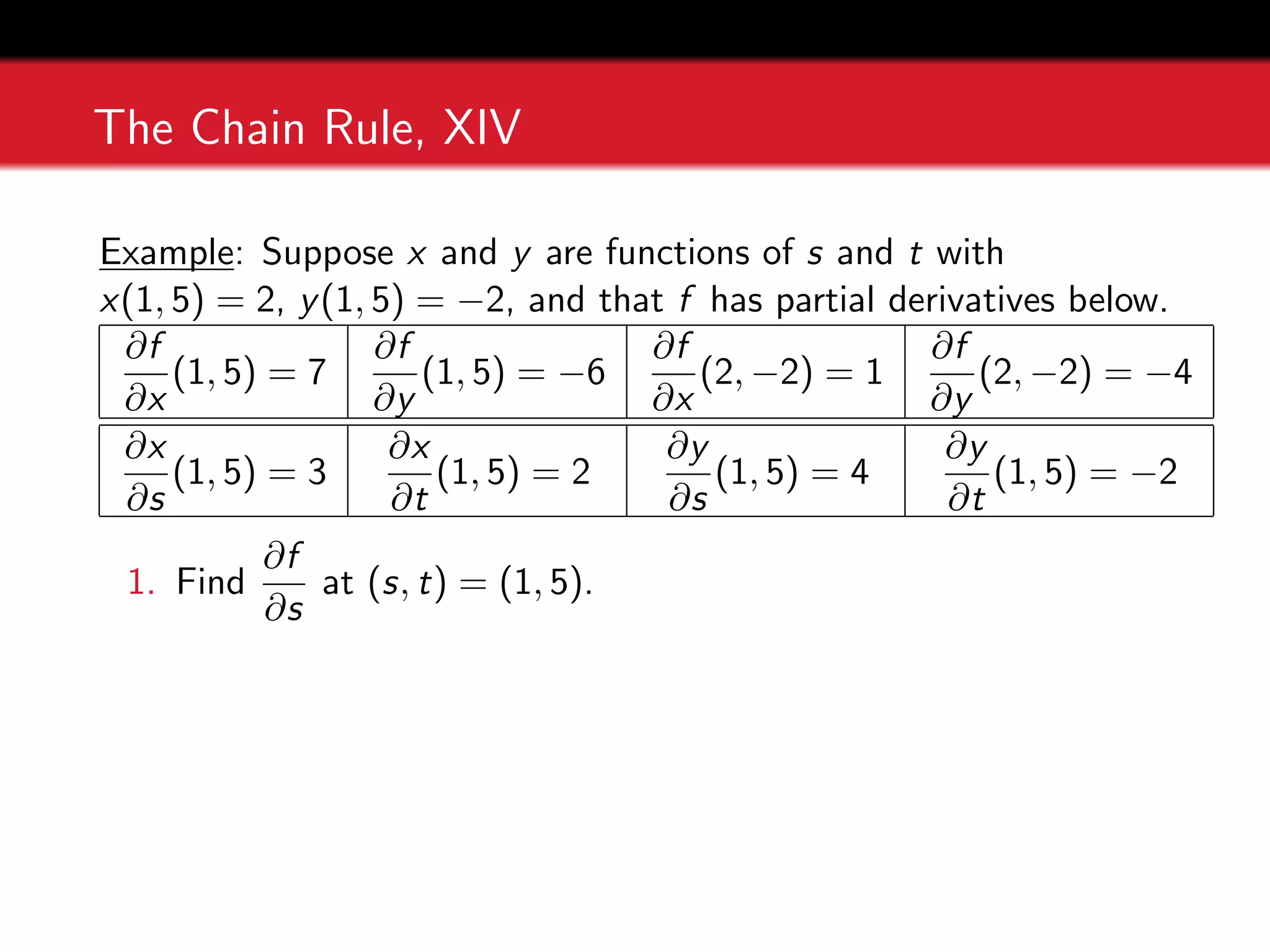
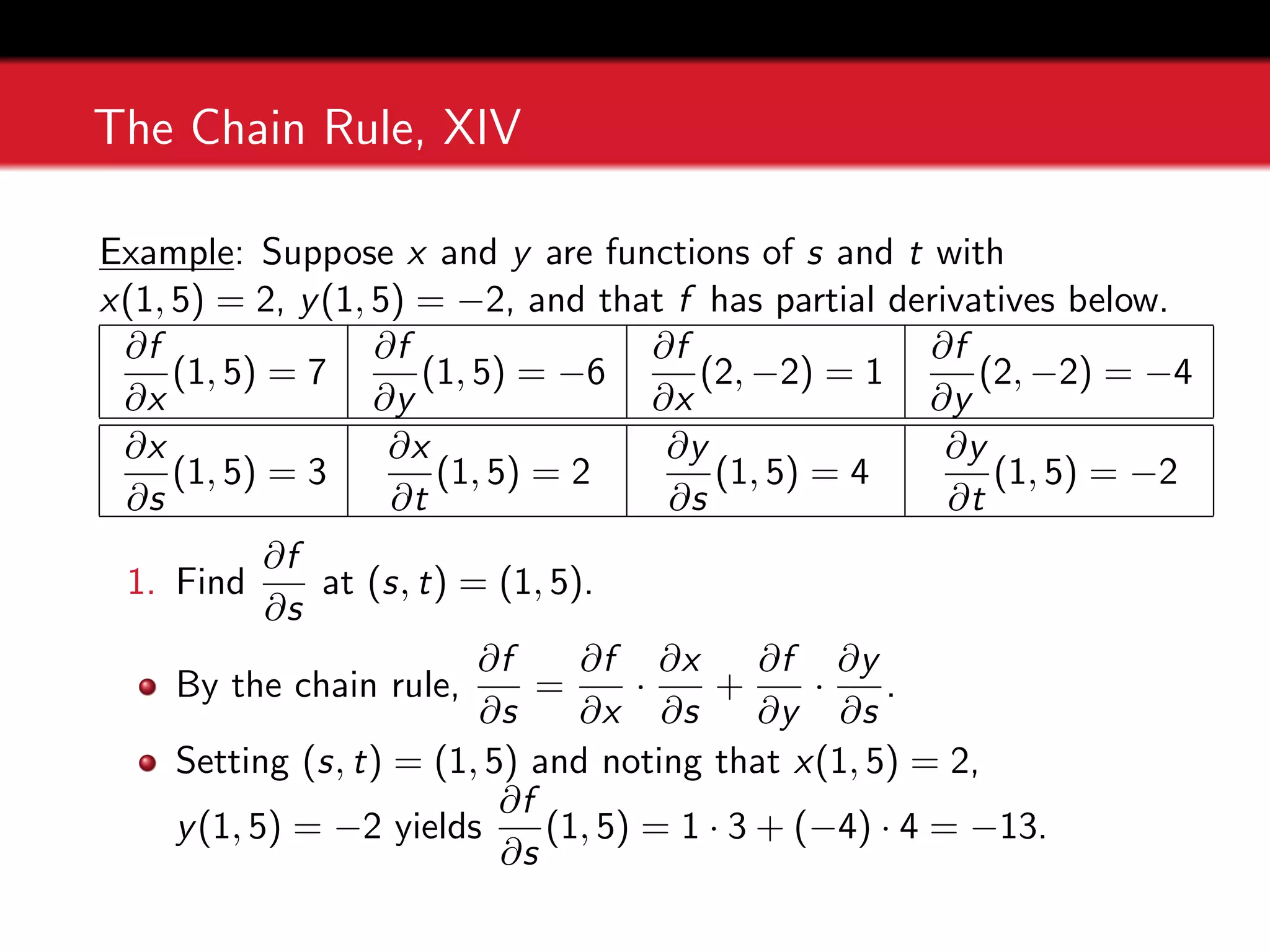
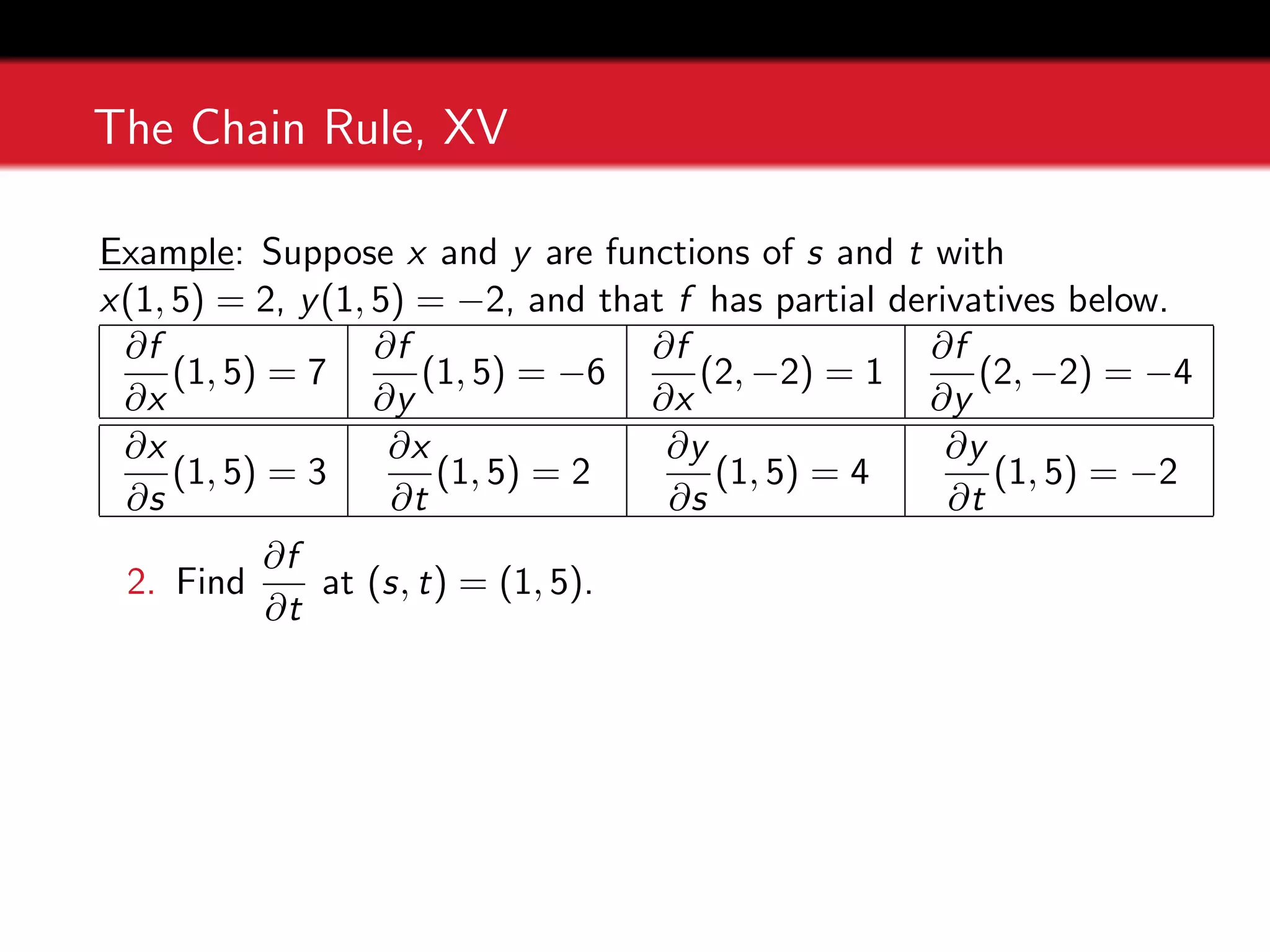
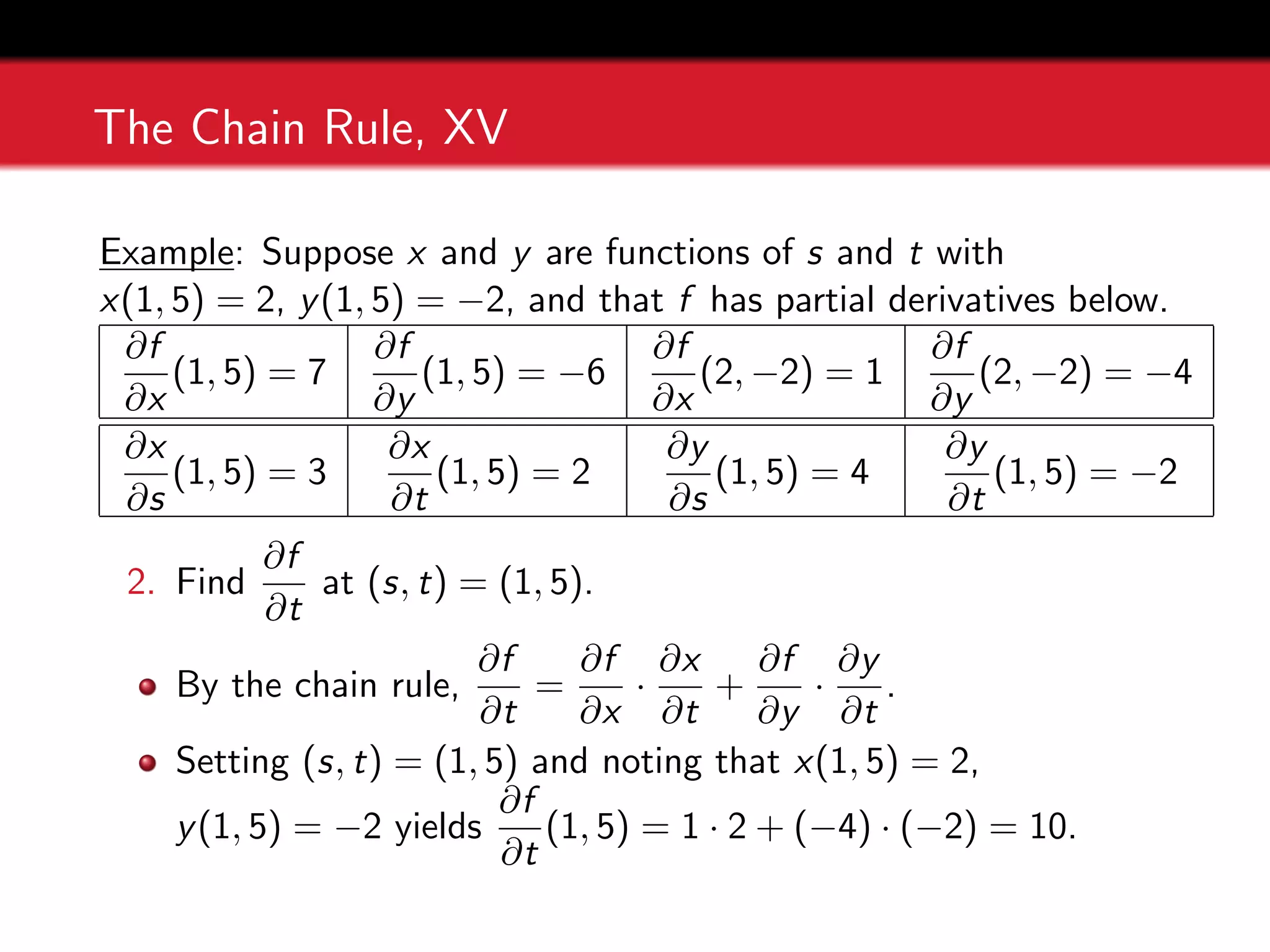
2. It also gives examples of applying the chain rule to find derivatives like df/dt for functions where variables like x, y, and z depend on t, or to find partial derivatives like ∂f/∂s and ∂f/∂t.
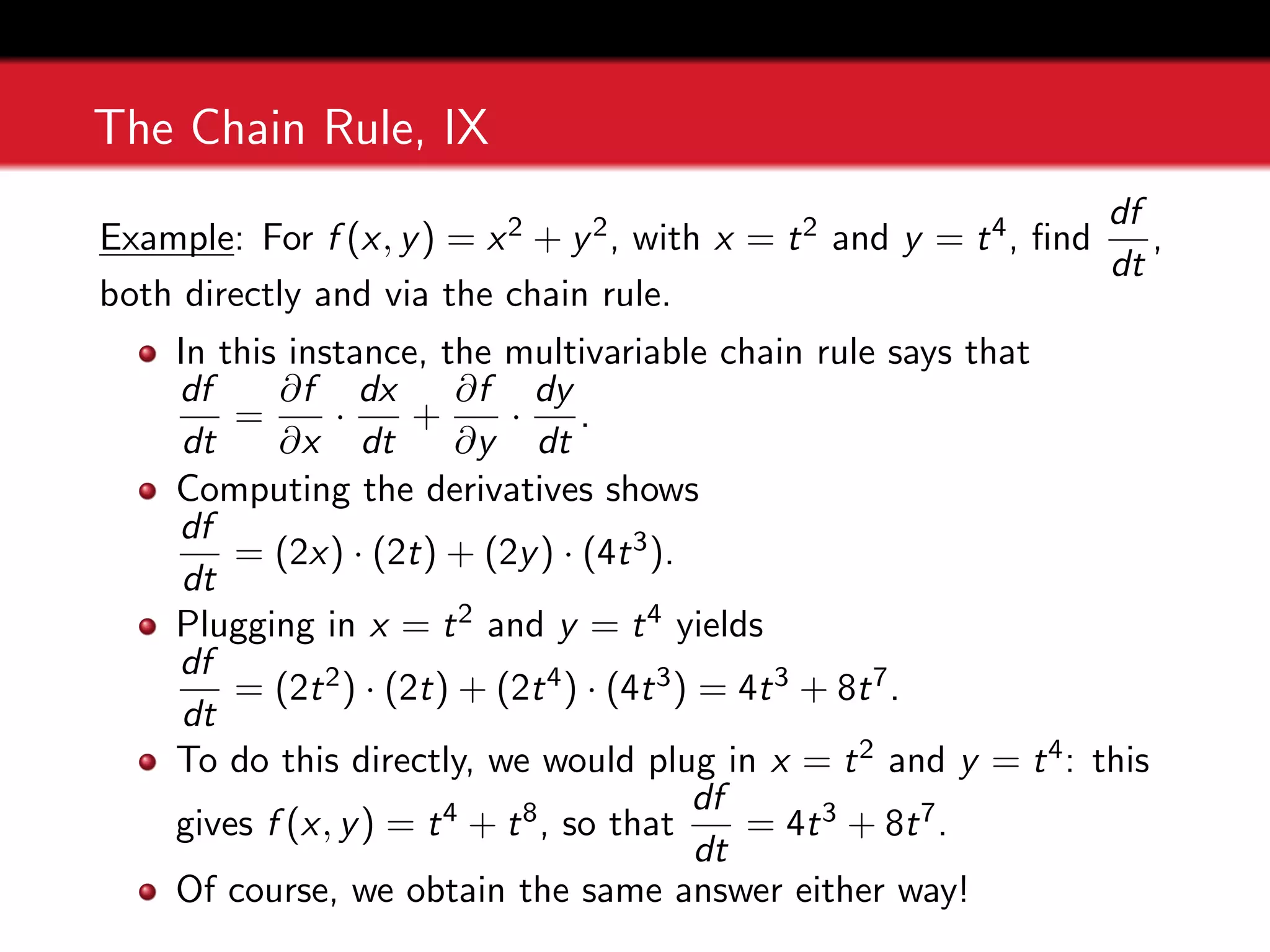
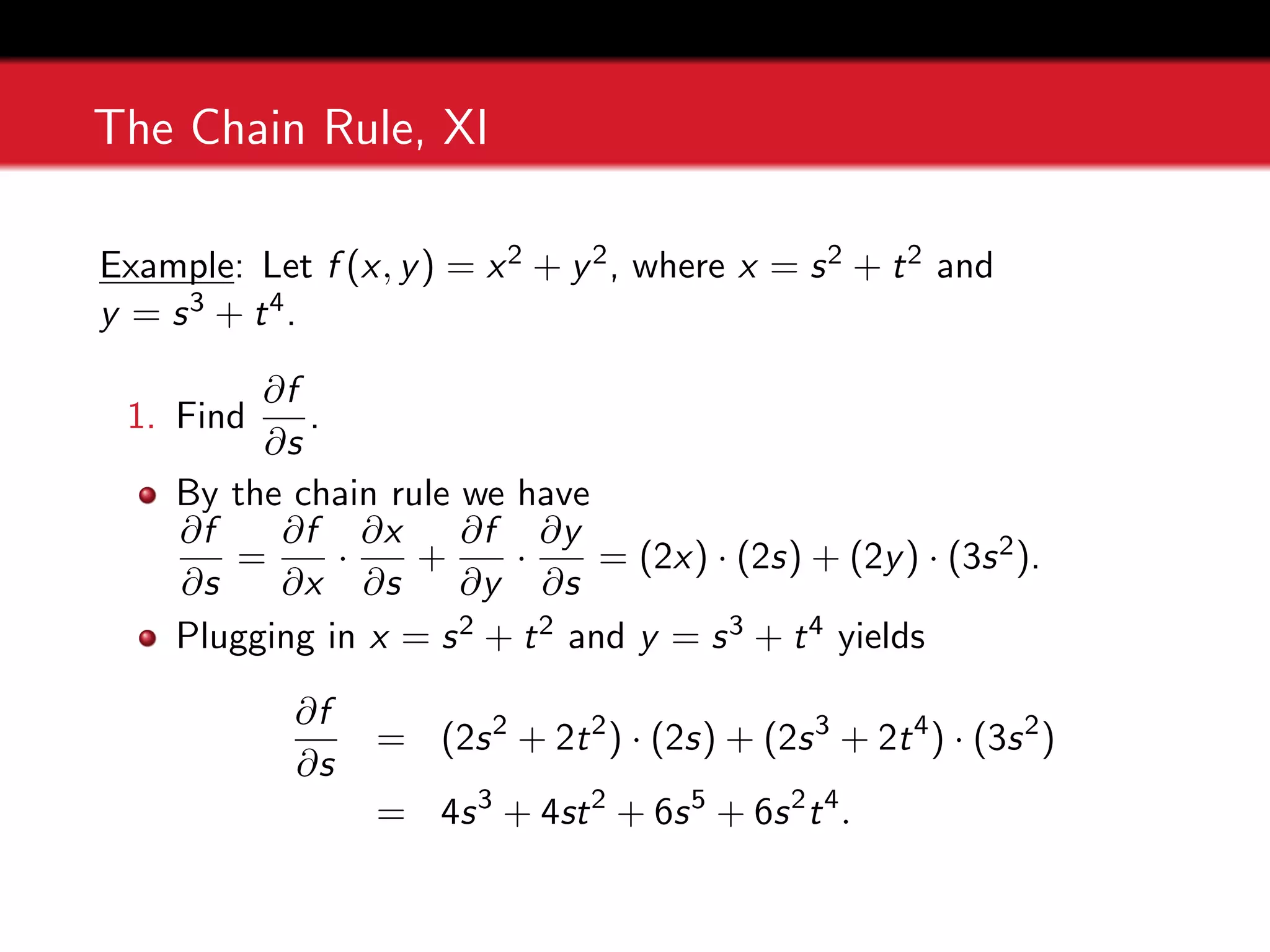
3. One example works through applying the chain rule to find df/dt for the function f(x,y) = x^2 + y^2, where x = t^2 and y = t^4, and verifies the
![The Chain Rule, V
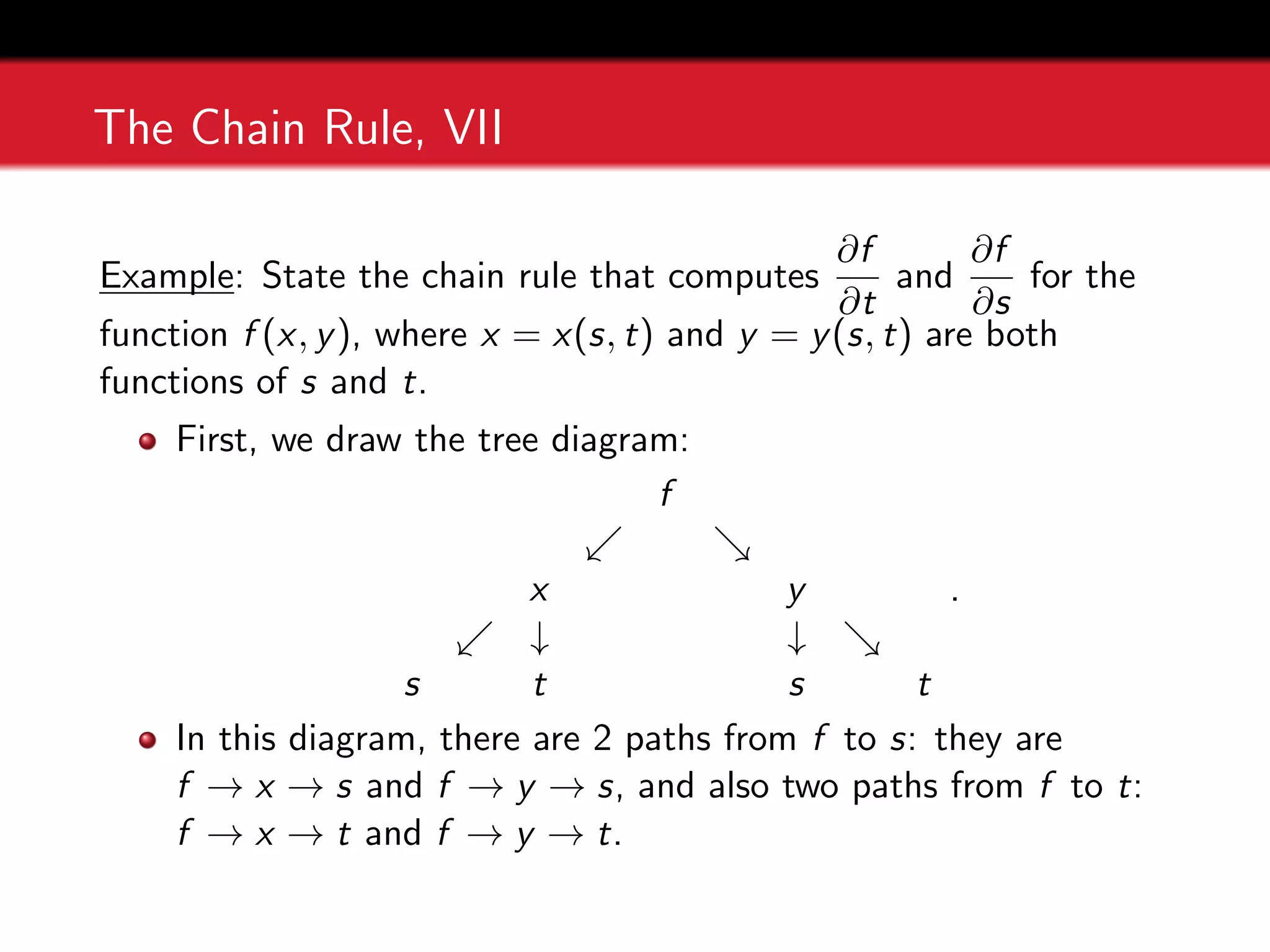
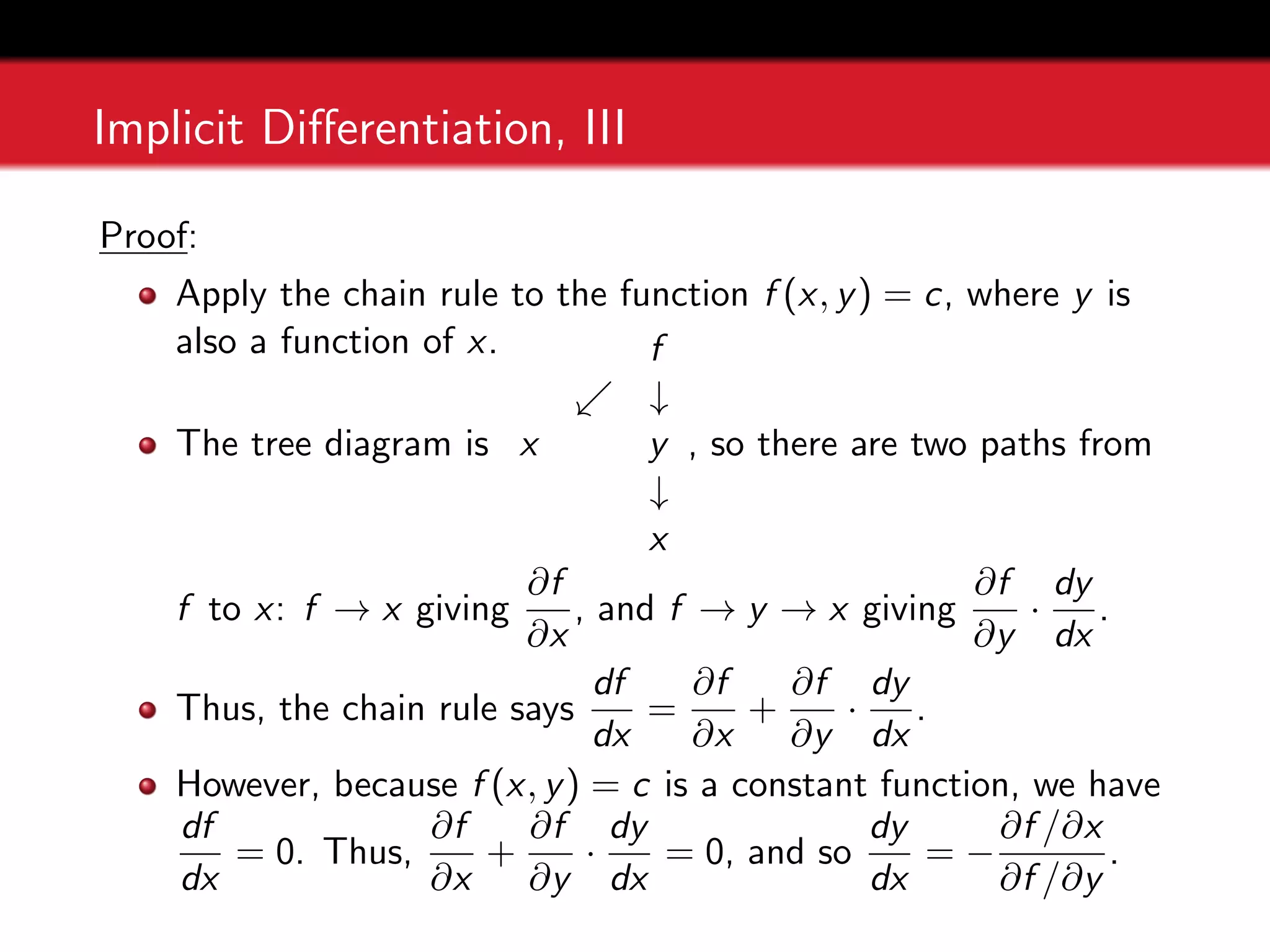
The method is to draw a “tree diagram” as follows:
1. Start with the initial function f , and draw an arrow pointing
from f to each of the variables it depends on.
2. For each variable listed, draw new arrows branching from that
variable to any other variables they depend on. Repeat the
process until all dependencies are shown in the diagram.
3. Associate each arrow from one variable to another with the
derivative
∂[top]
∂[bottom]
.
4. To write the version of the chain rule that gives the derivative
∂v1/∂v2 for any variables v1 and v2 in the diagram (where v2
depends on v1), first find all paths from v1 to v2.
5. For each path from v1 to v2, multiply all of the derivatives
that appear in each path from v1 to v2. Finally, sum the
results over all of the paths: this is ∂v1/∂v2.](https://image.slidesharecdn.com/lecture05fchainrule-230103102137-2e492c46/75/_lecture_05-F_chain_rule-pdf-11-2048.jpg)