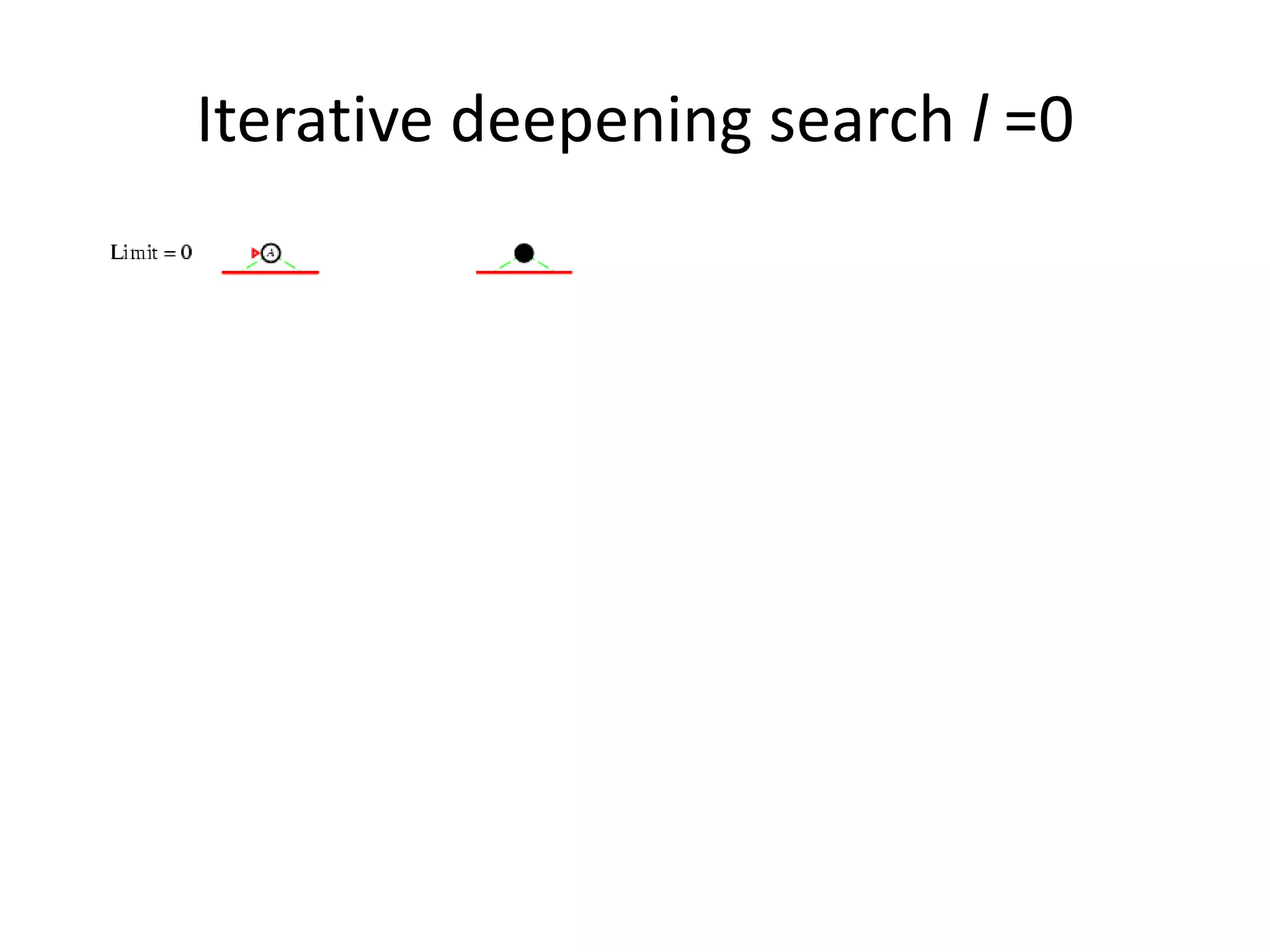
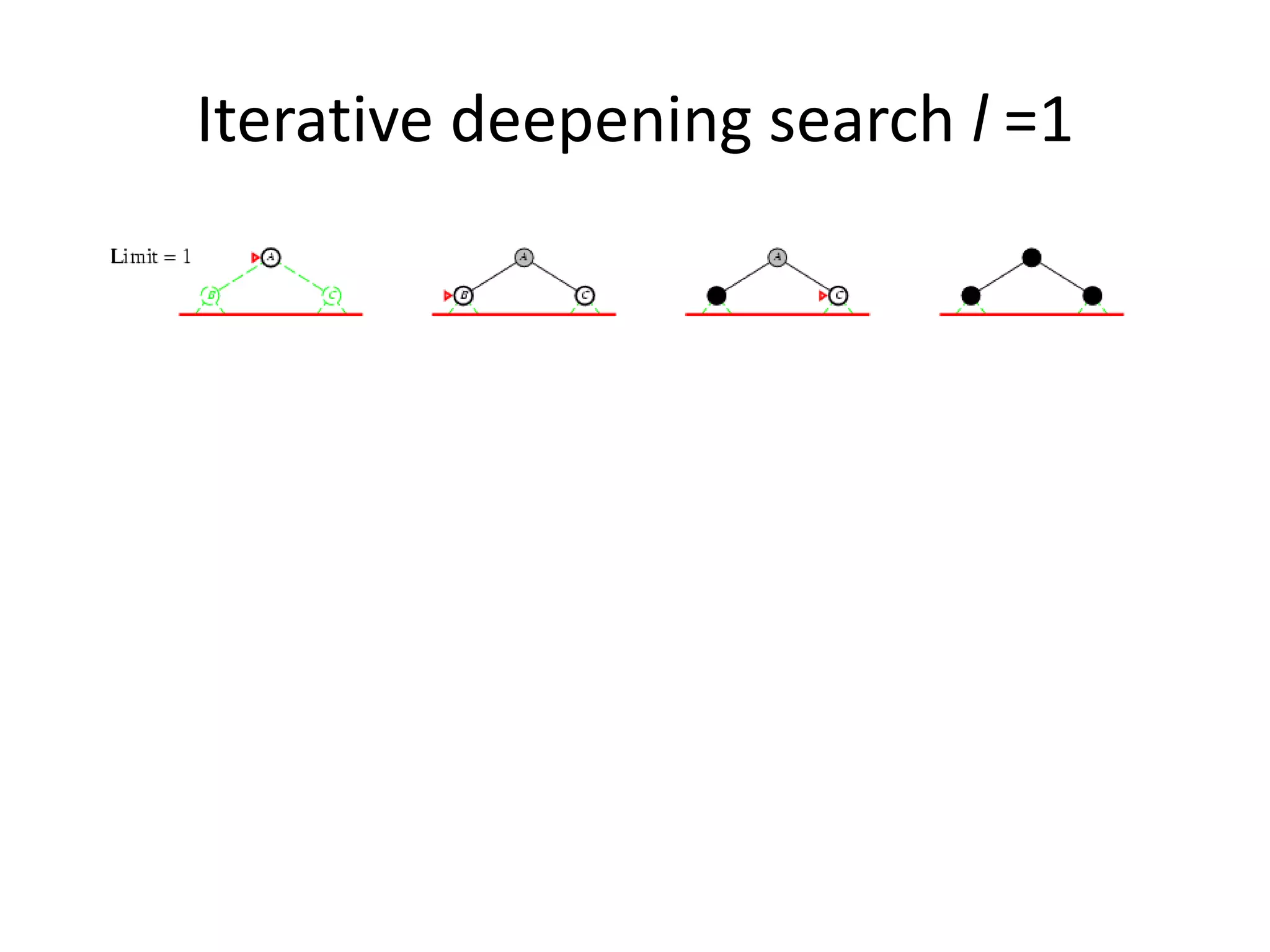
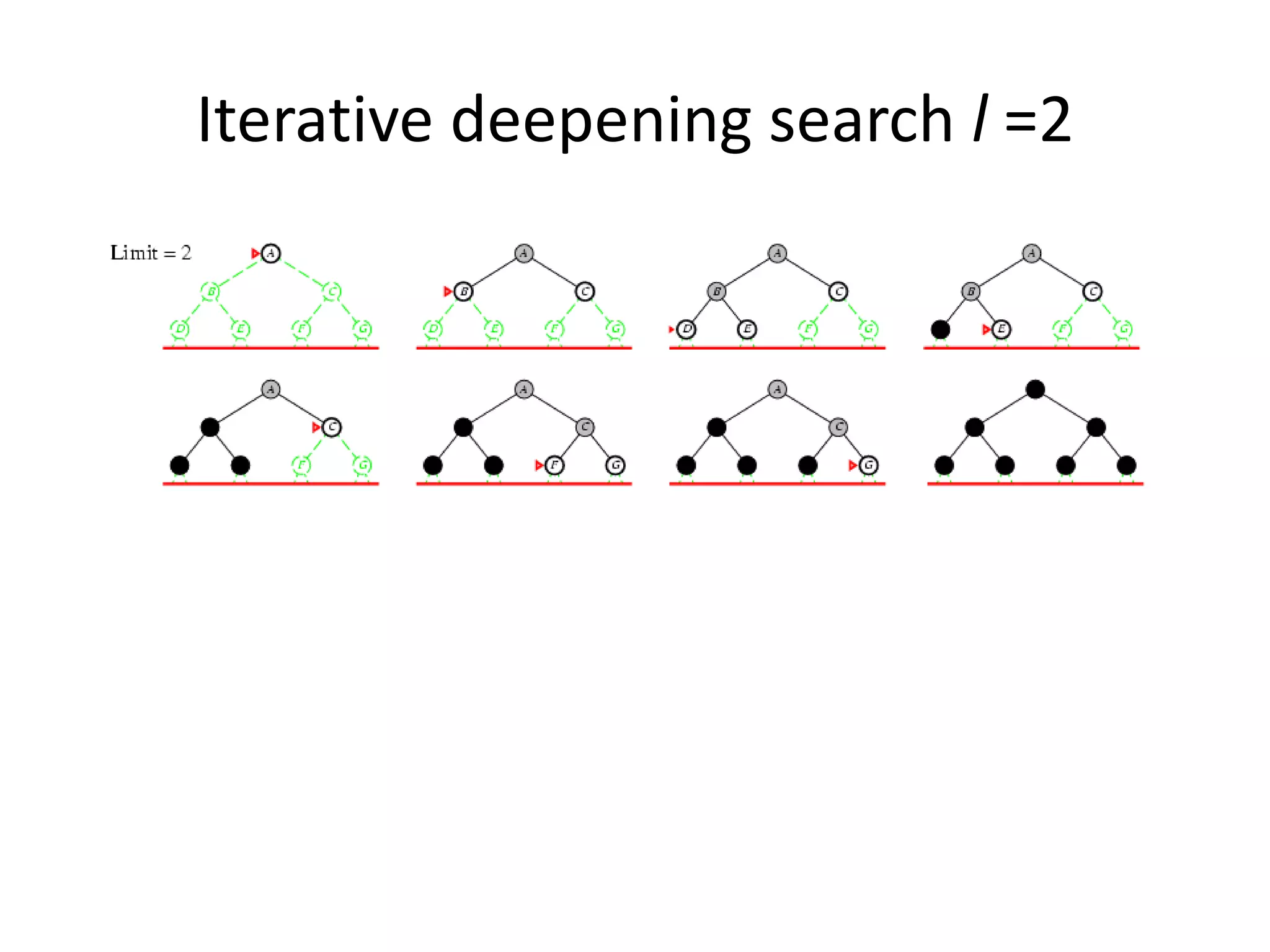
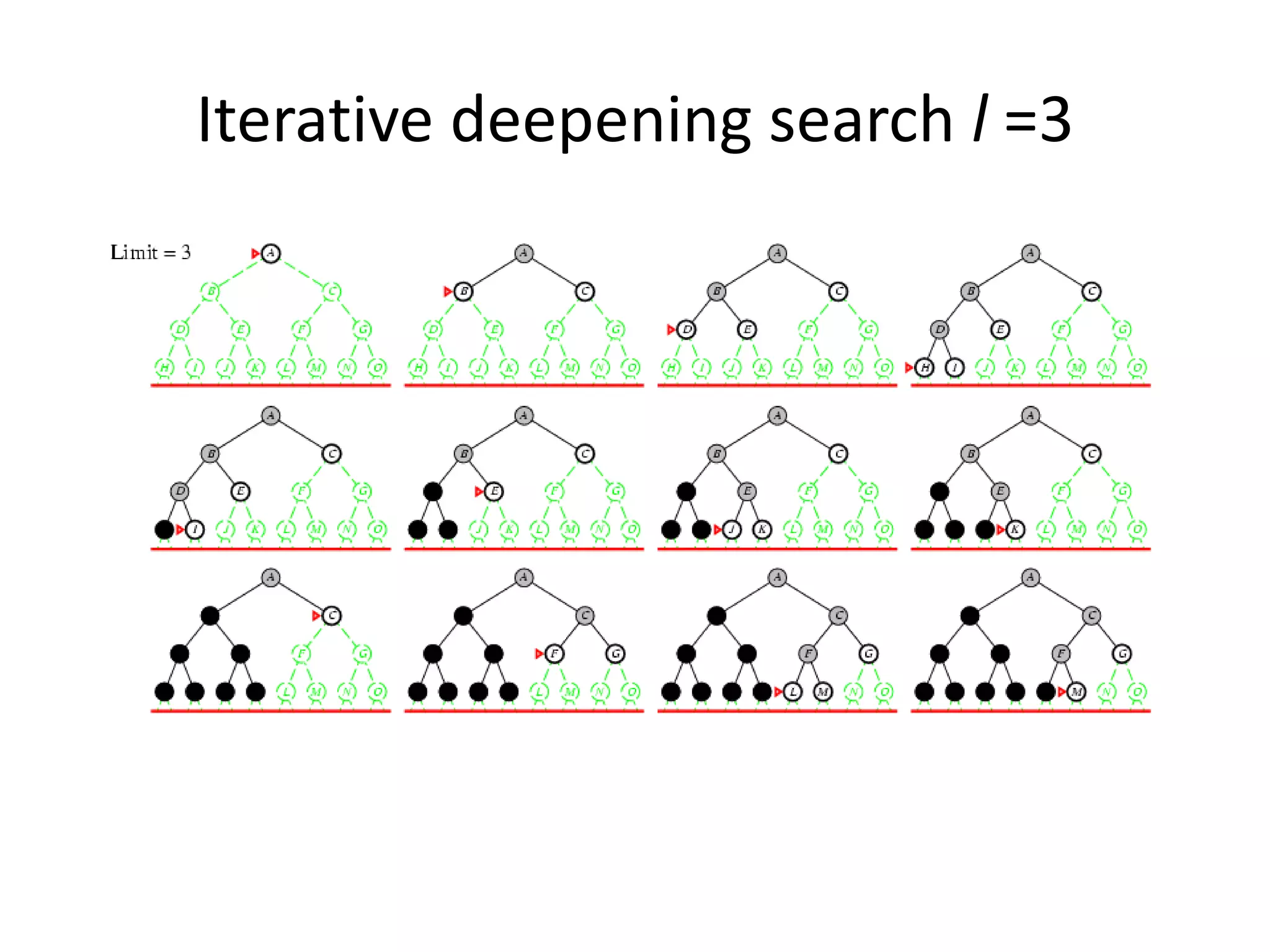
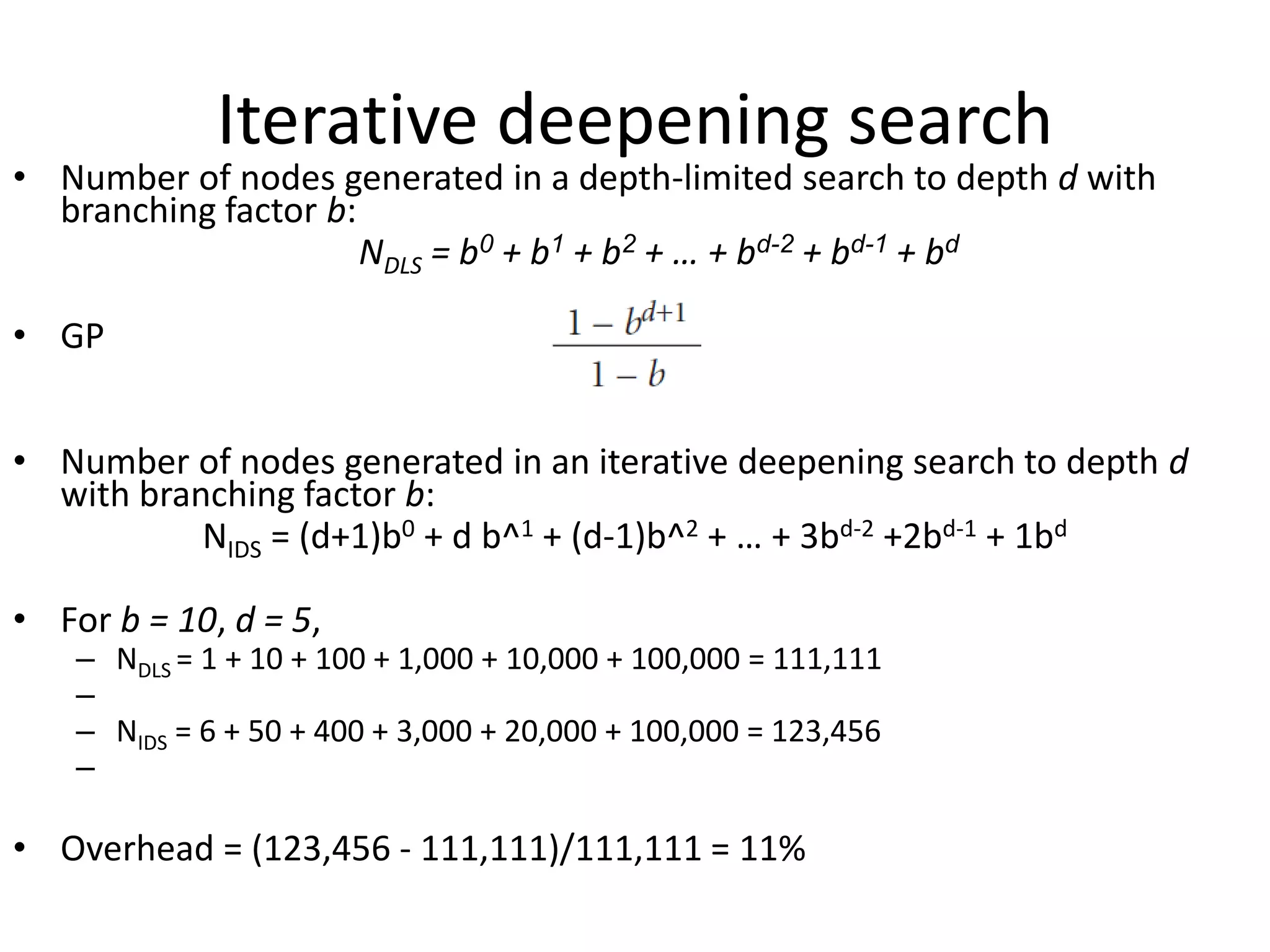
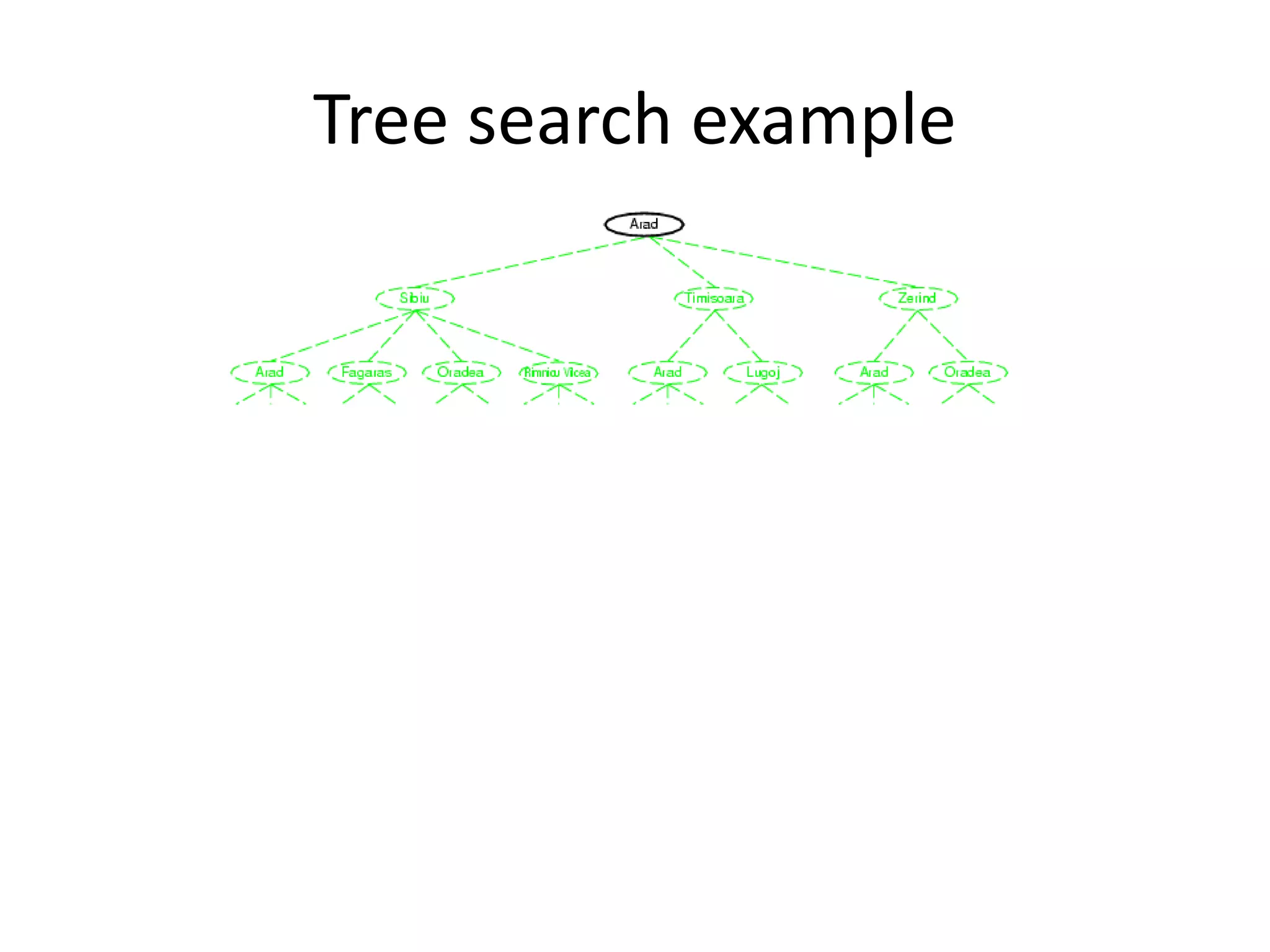
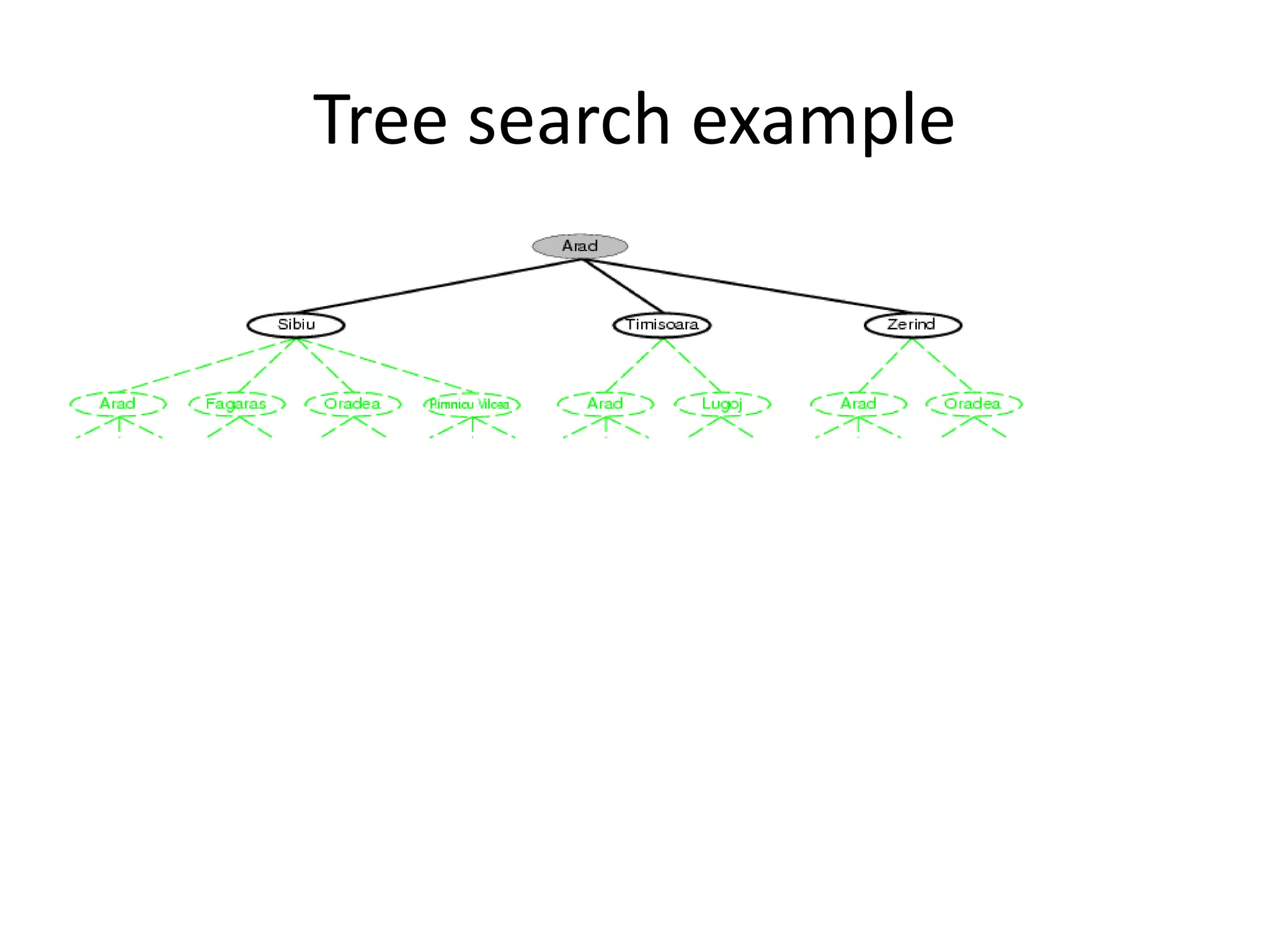
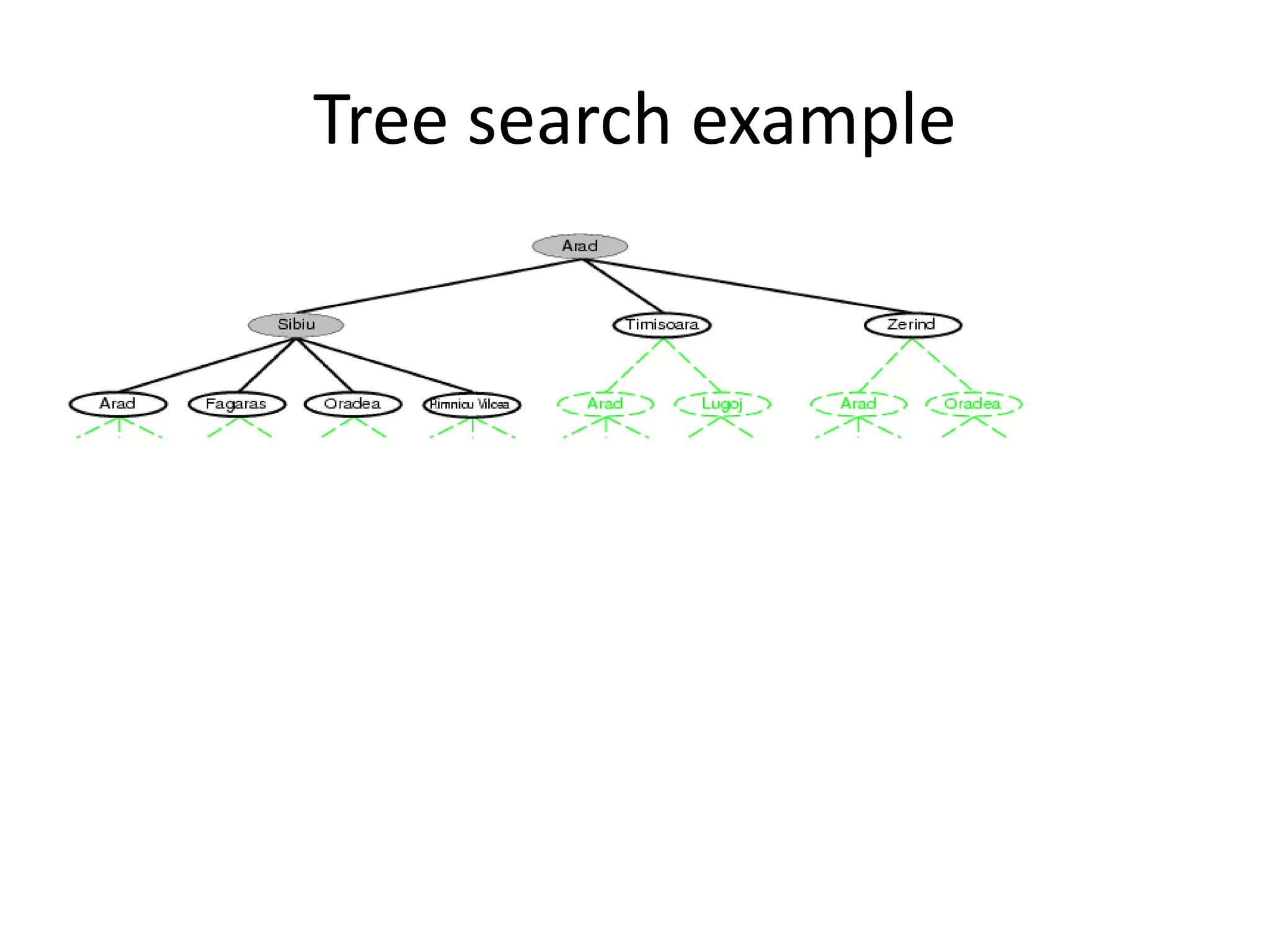
The document discusses different search algorithms used in artificial intelligence including depth-first search, breadth-first search, and iterative deepening search. It provides details on how each algorithm works, including that depth-first search puts successors at the front of a queue, breadth-first search puts successors at the end of a queue, and iterative deepening search performs repeated depth-limited searches with increasing depth limits. Examples are given to illustrate tree search and the different search strategies.
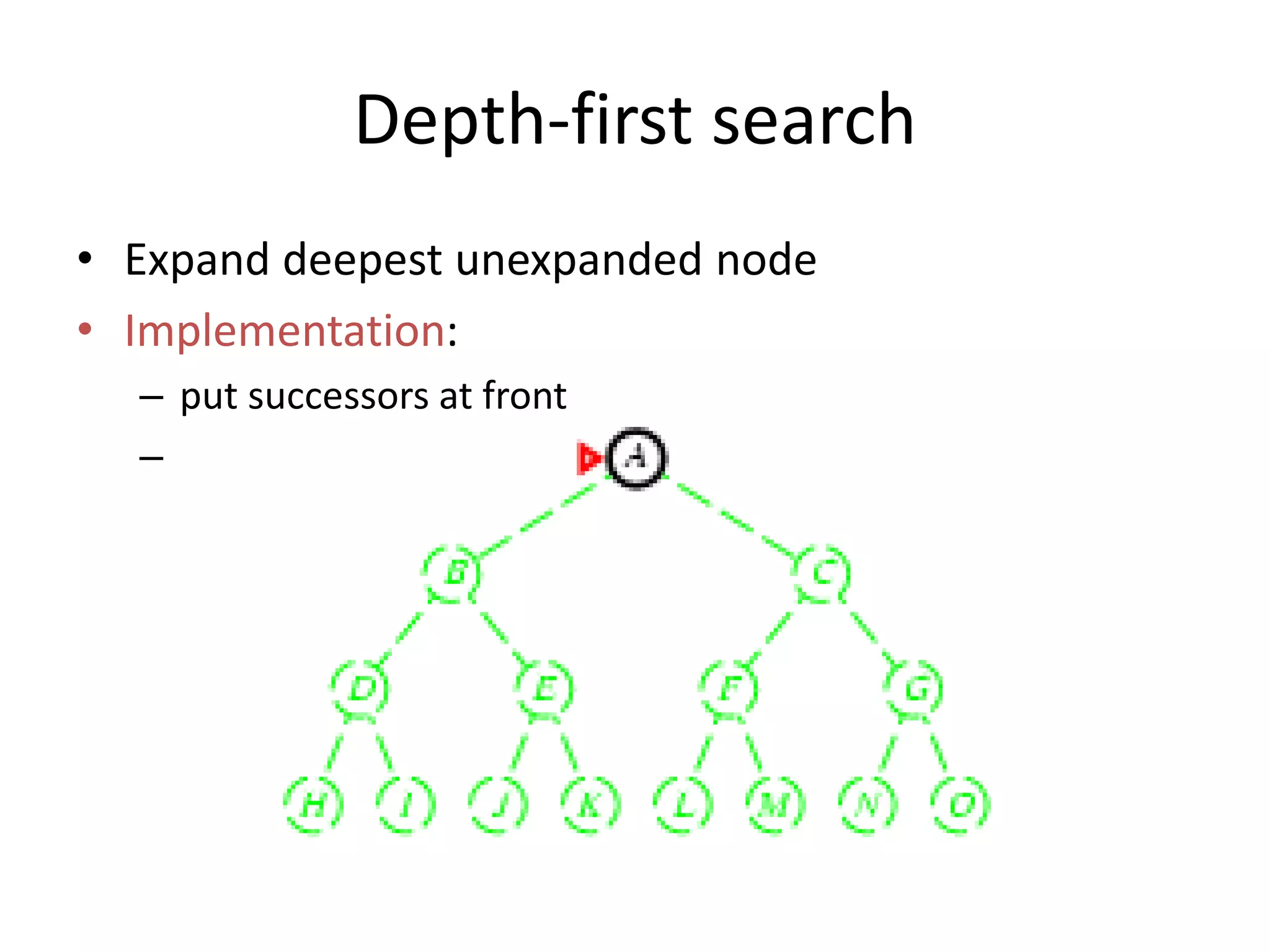
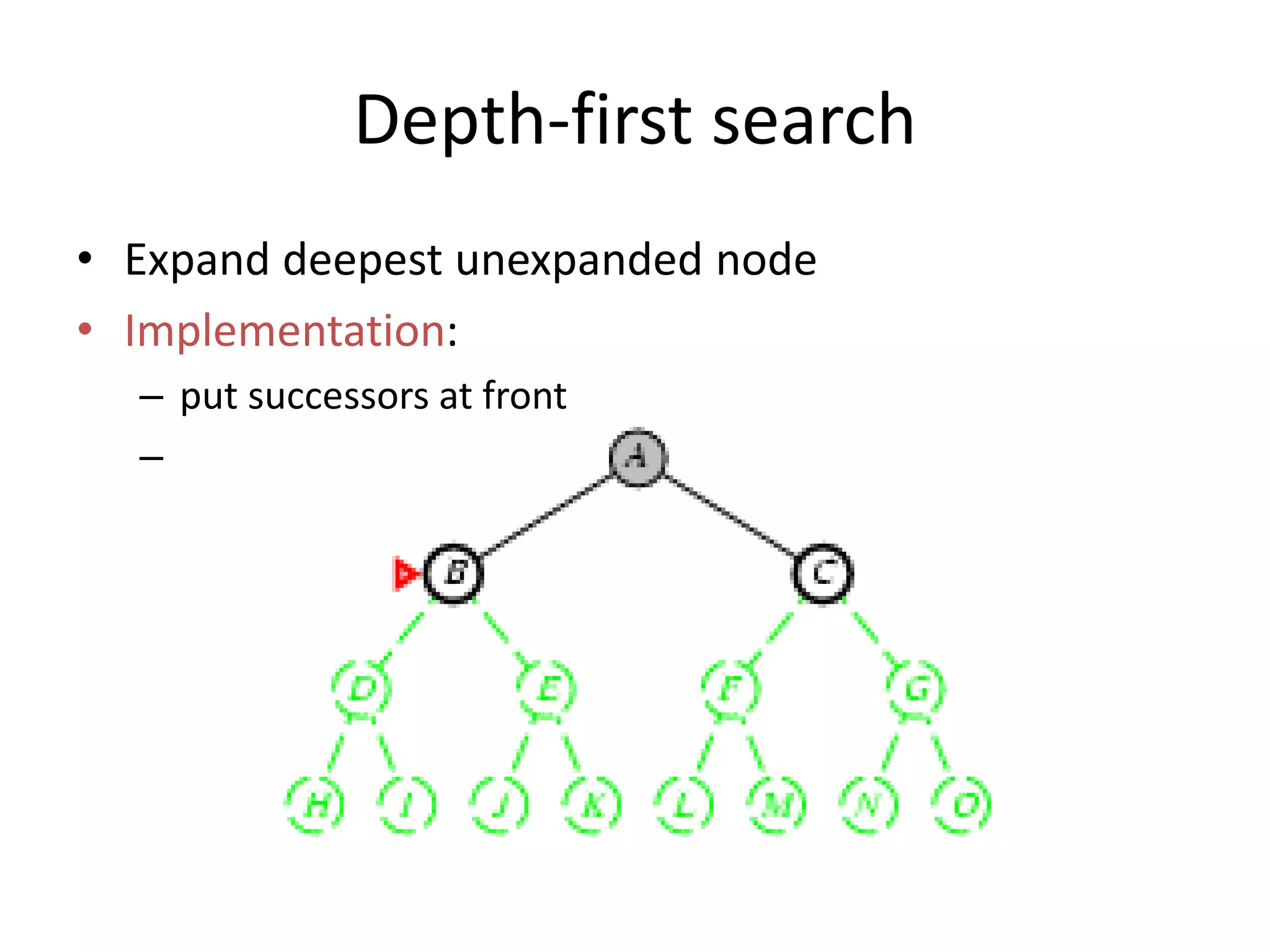
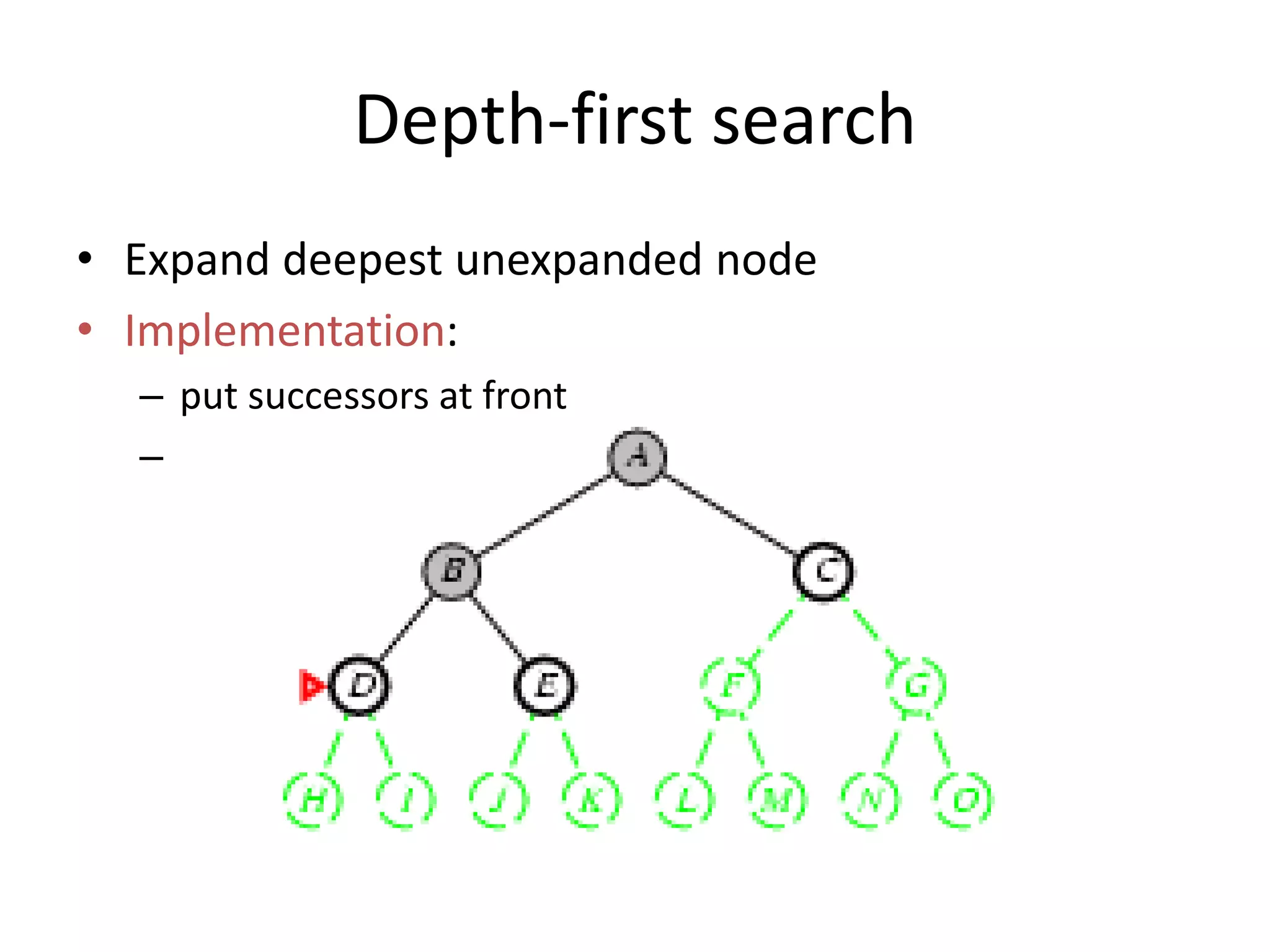
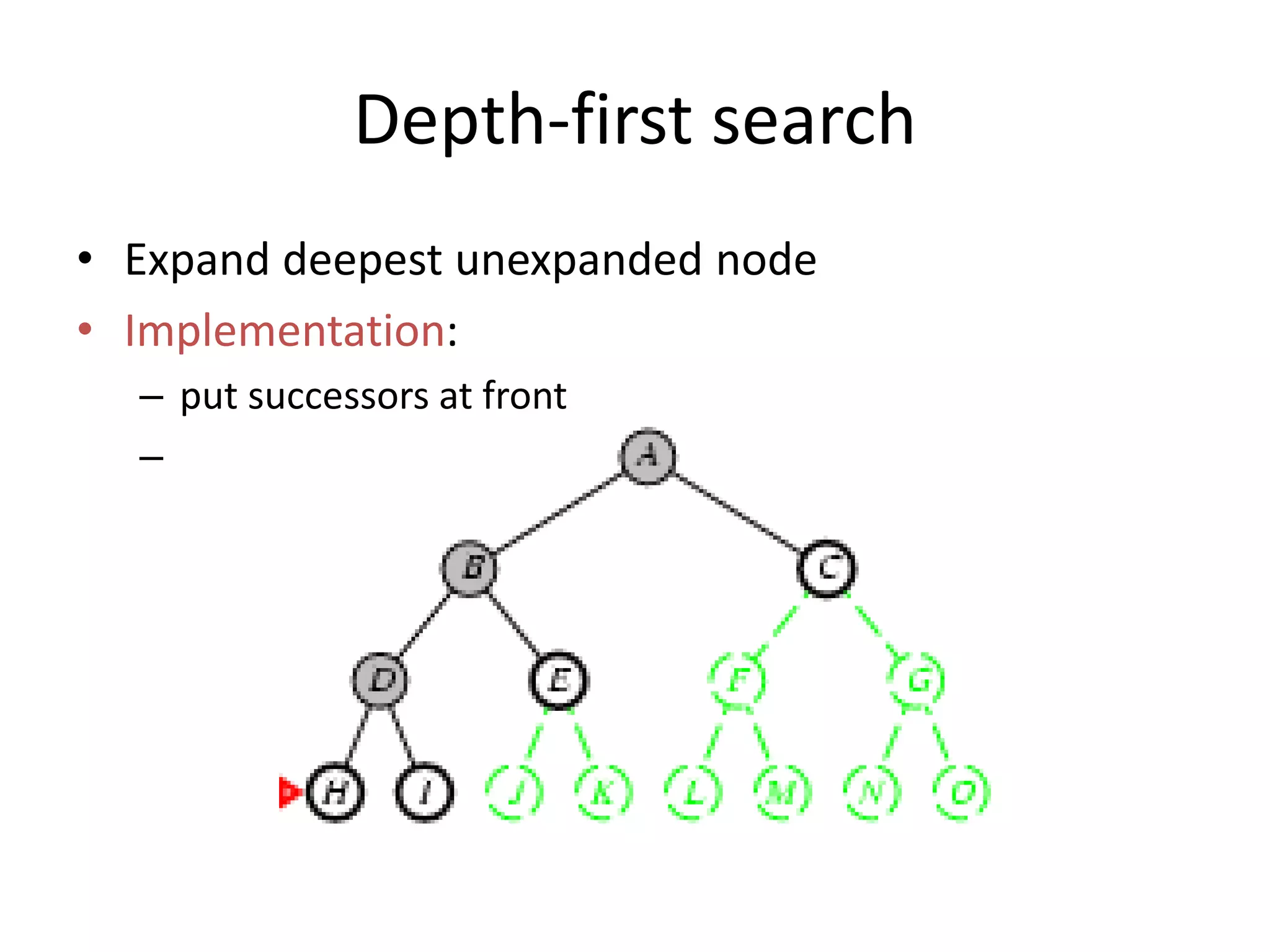
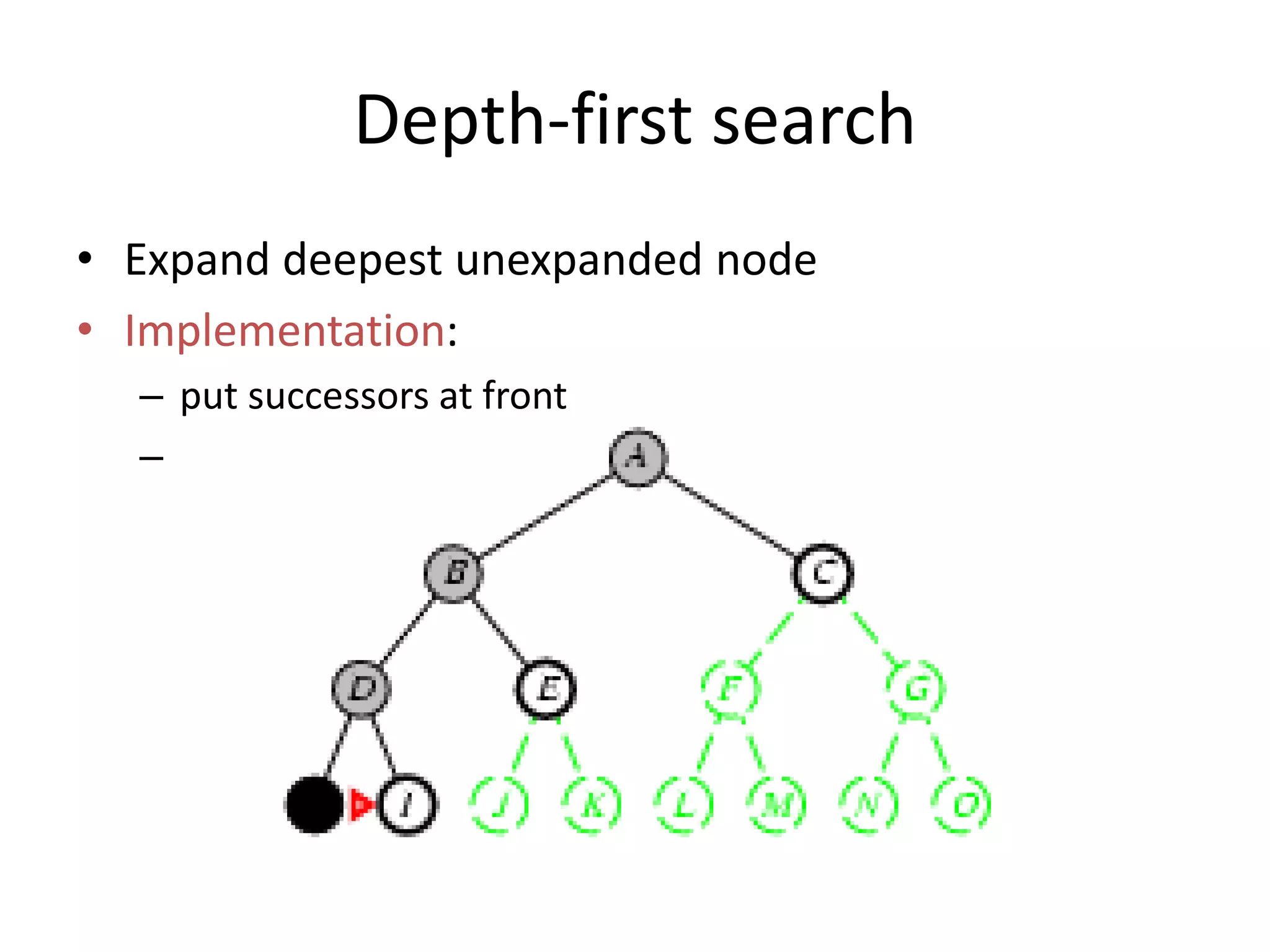
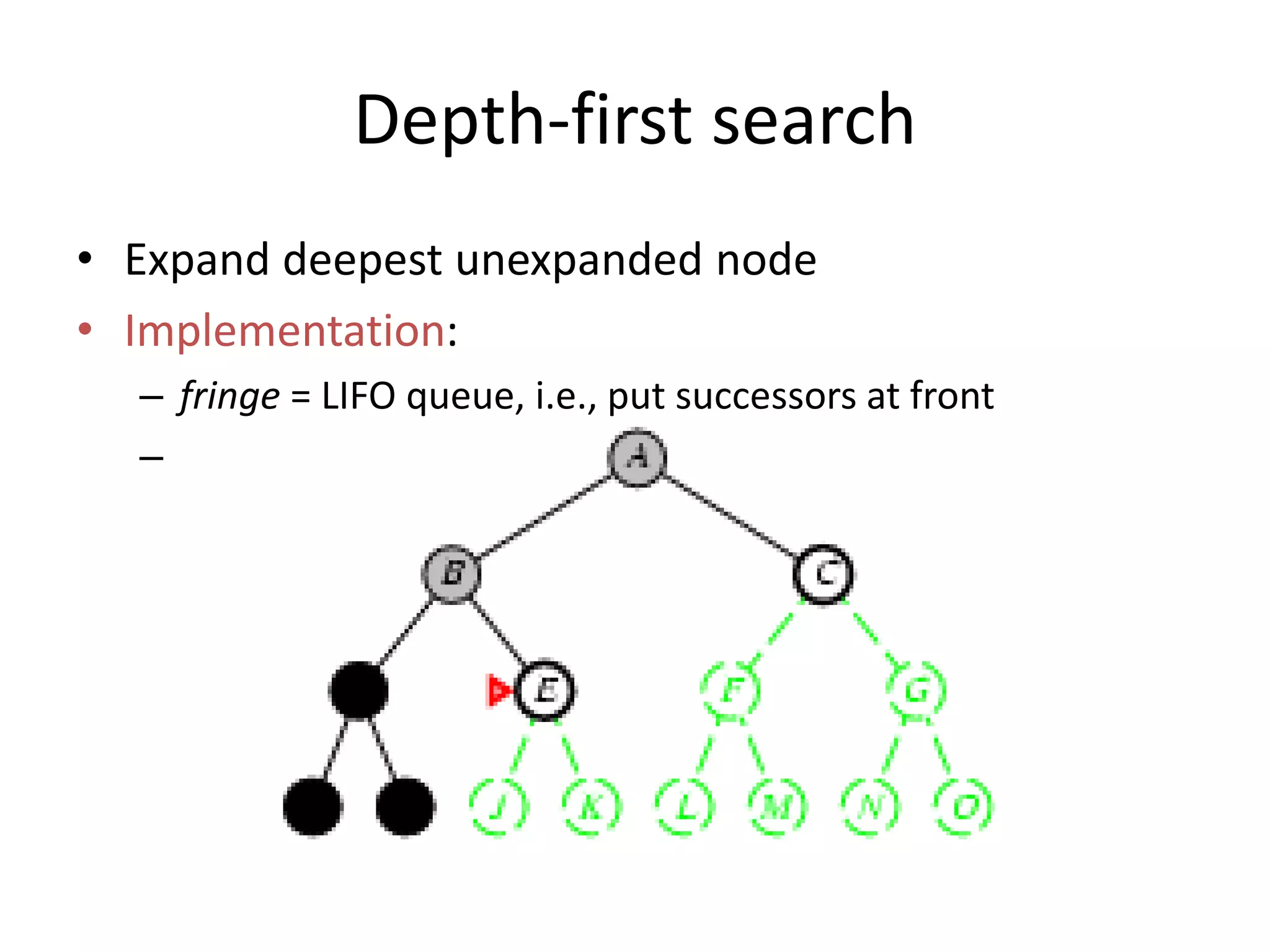
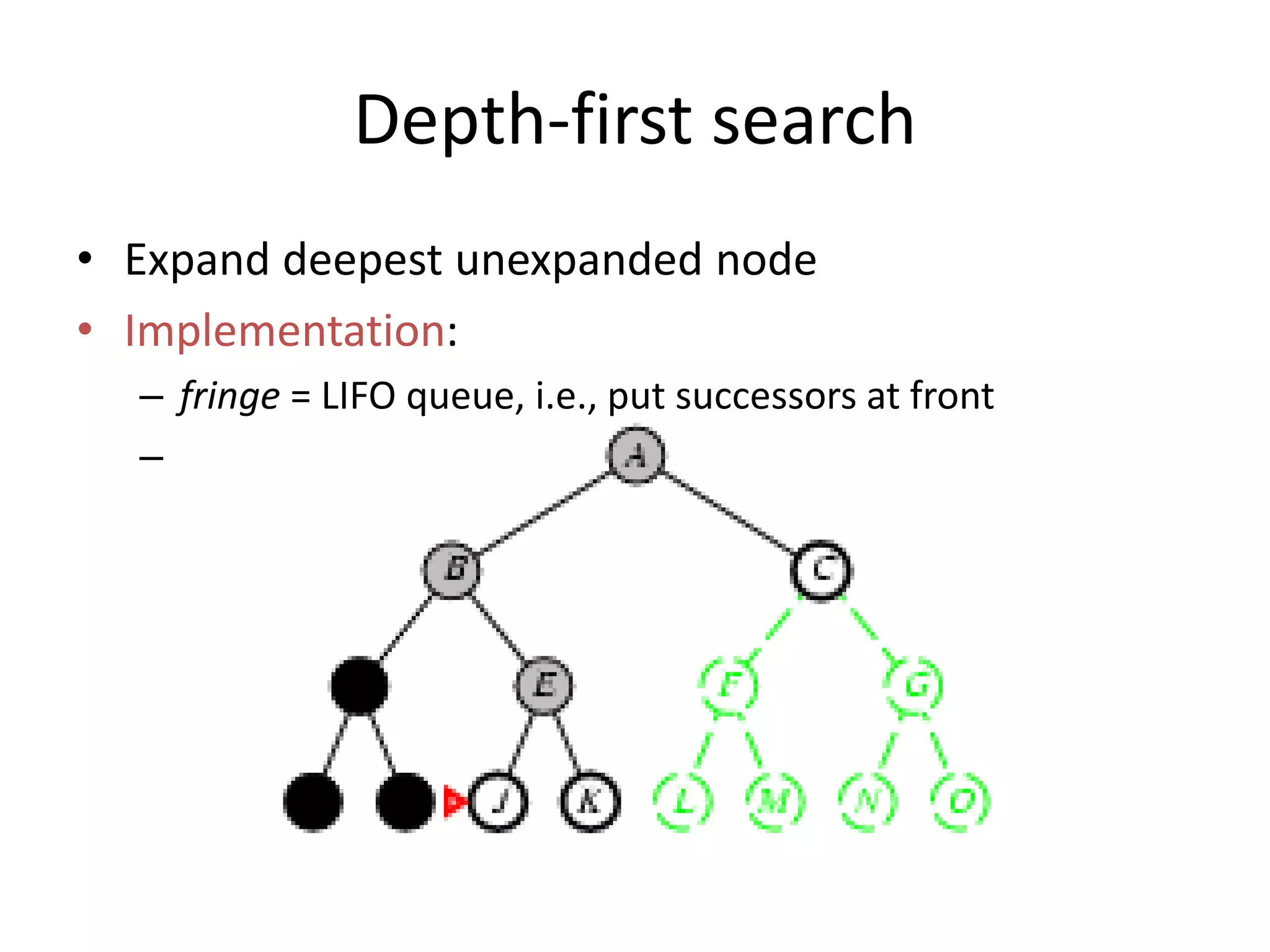
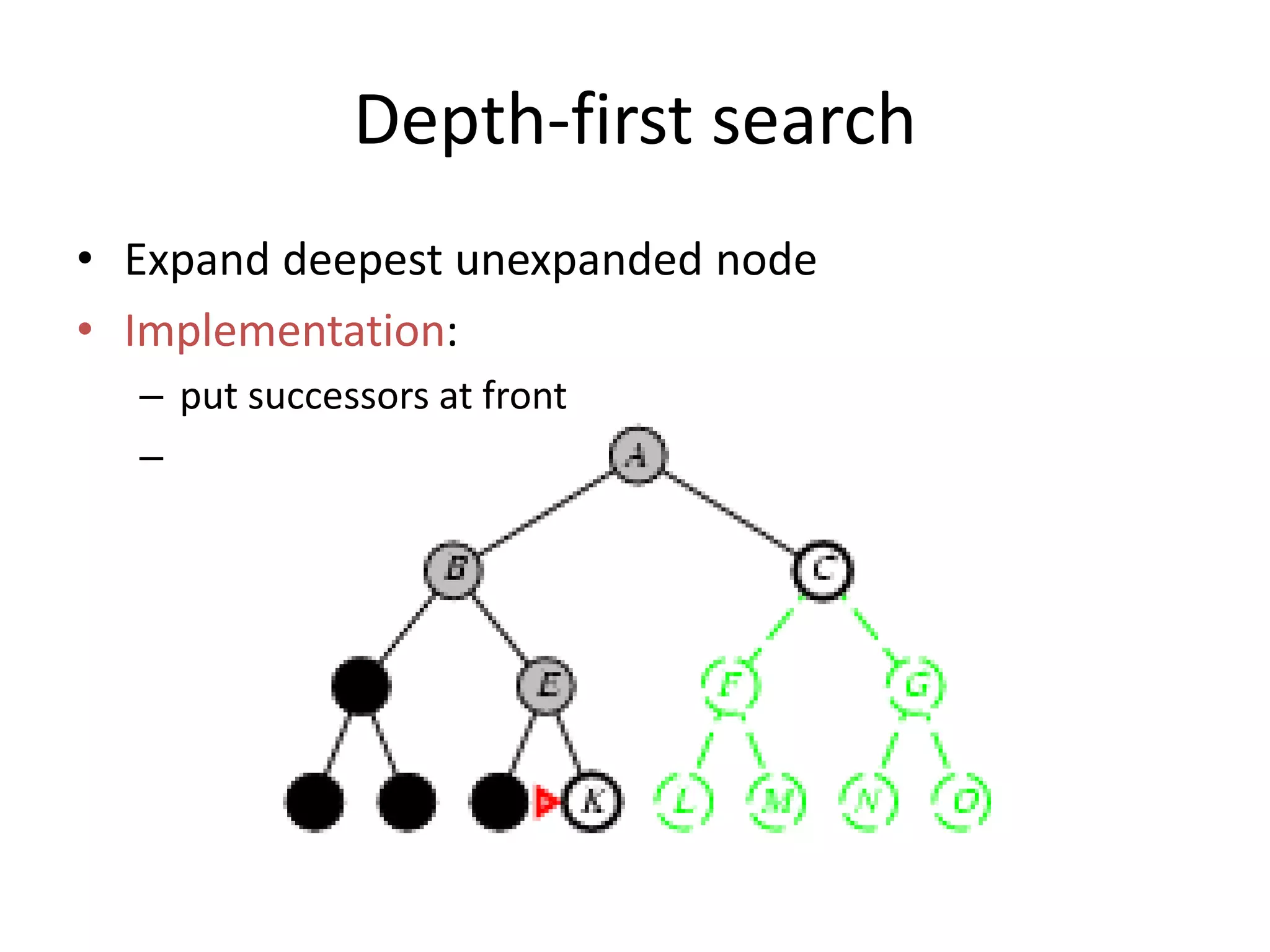
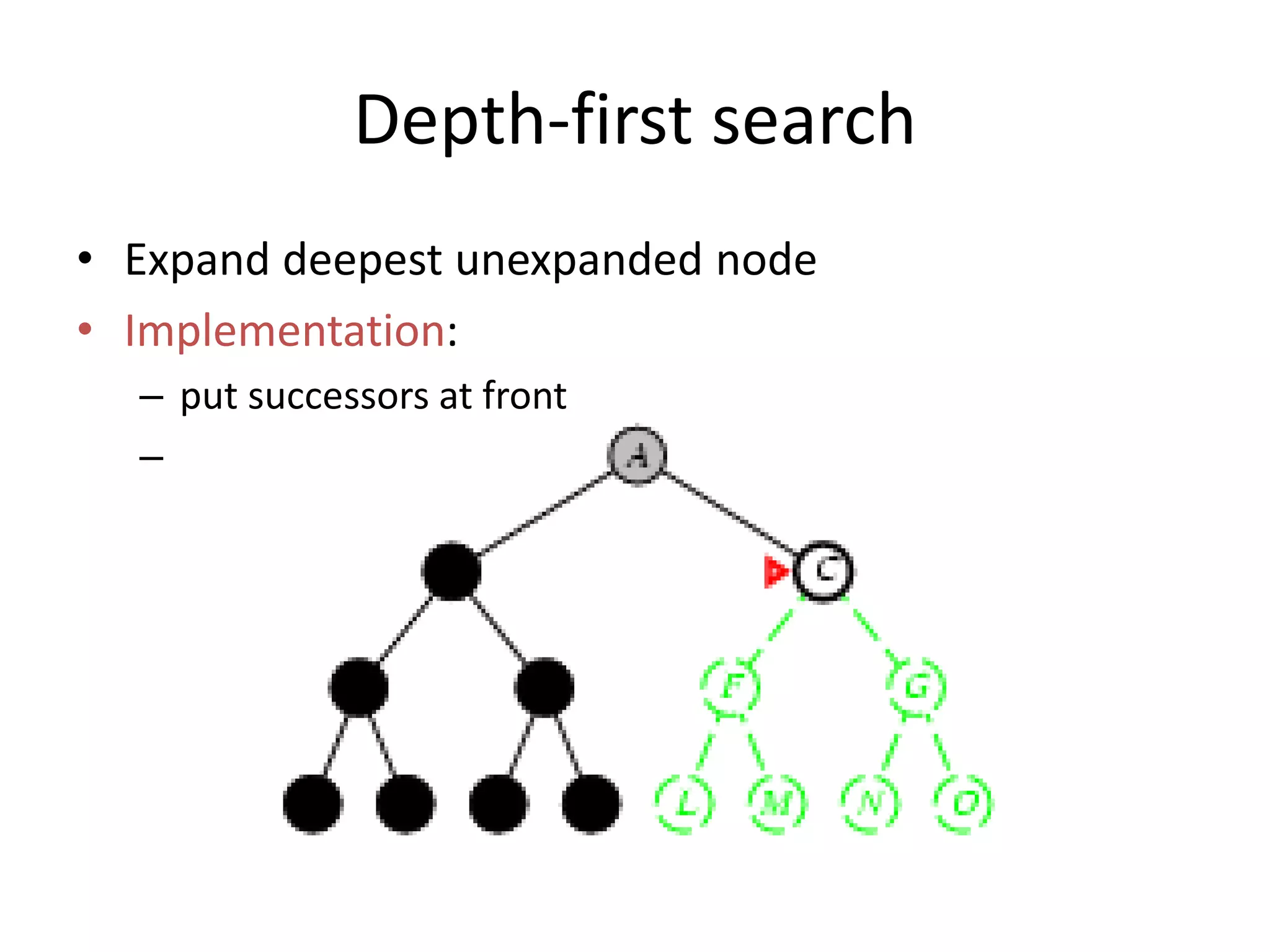
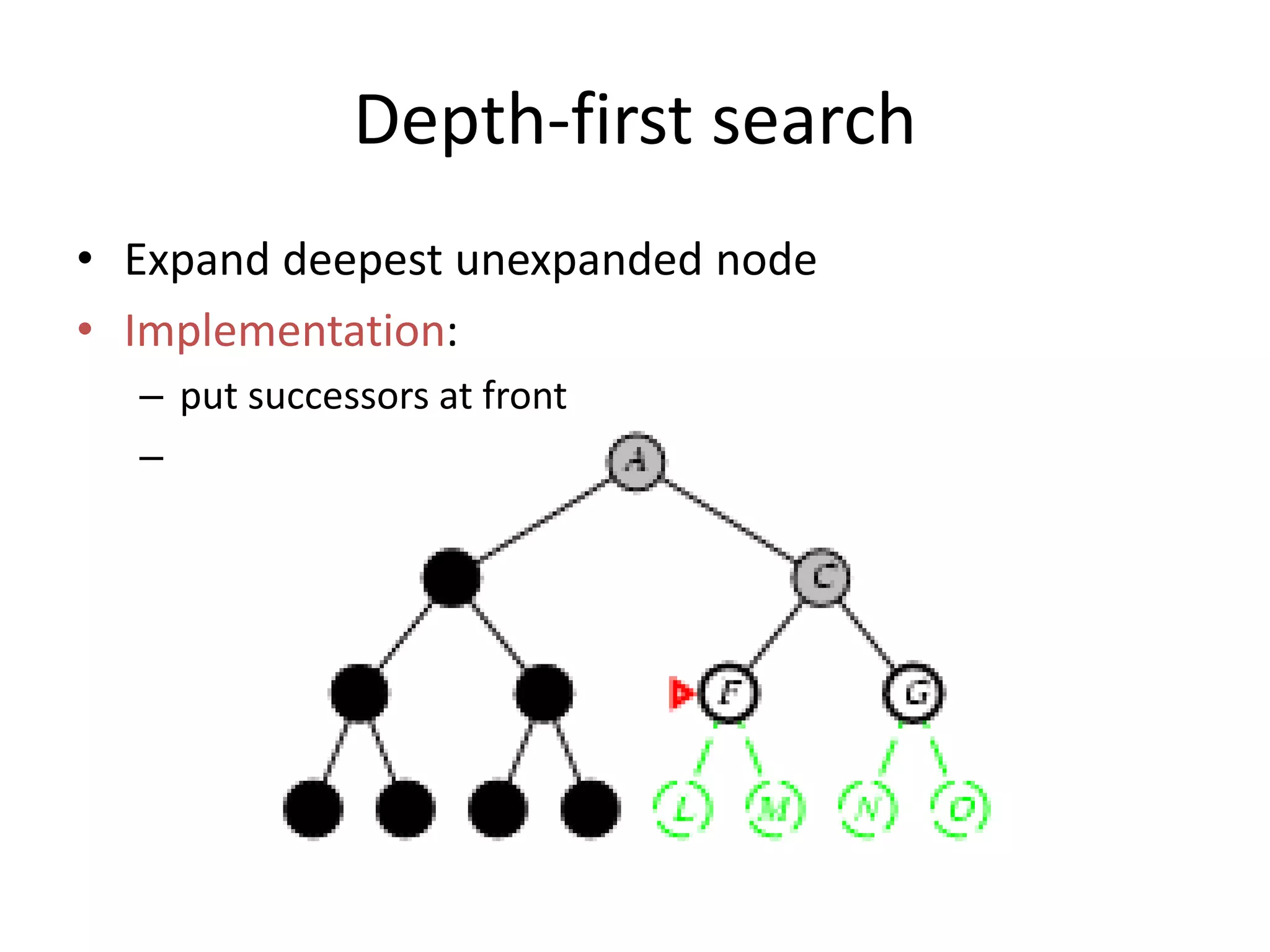
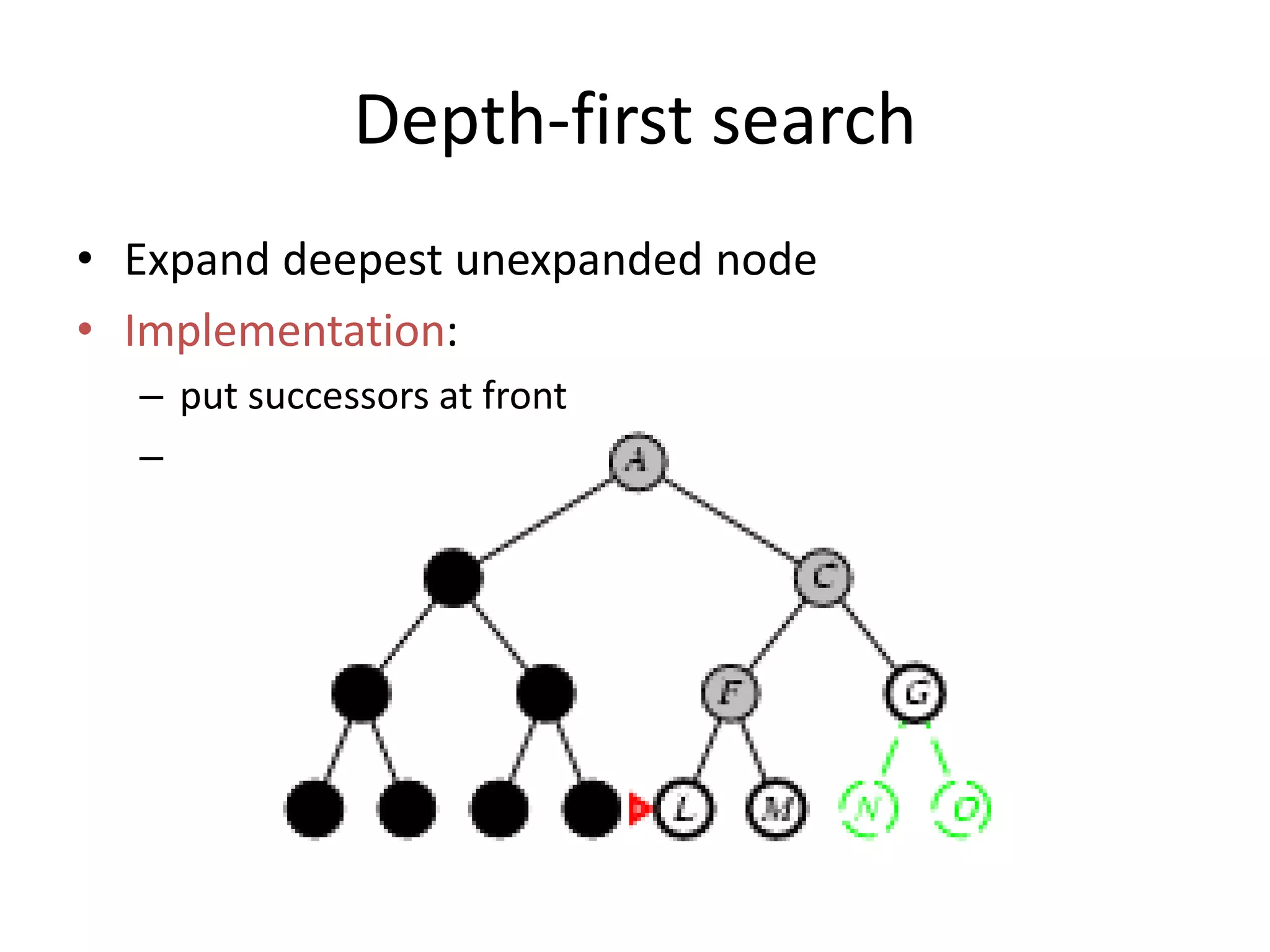
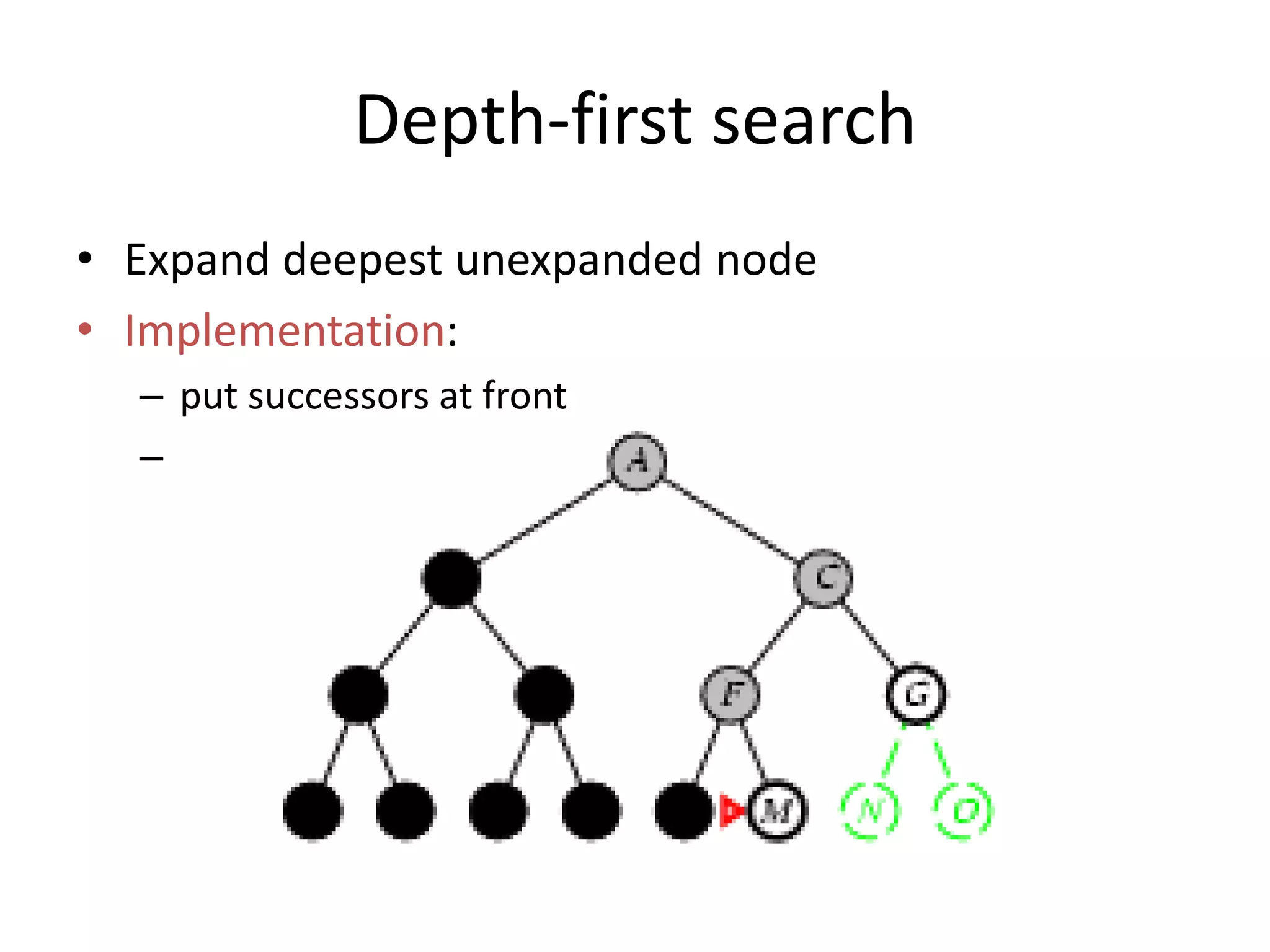
![Depth-first search
Function depth ()
{
queue = []; // initialize an empty queue
state = root_node; // initialize the start state
while (true)
{
if is_goal (state)
then return SUCCESS
else add_to_front_of_queue (successors (state));
if queue == []
then report FAILURE;
state = queue [0]; // state = first item in queue
remove_first_item_from (queue);
}
}](https://image.slidesharecdn.com/lecture3problemsolvingdfsbfsidf-220917173432-1e921a14/75/Lecture-3-Problem-Solving-DFS-BFS-IDF-pptx-30-2048.jpg)
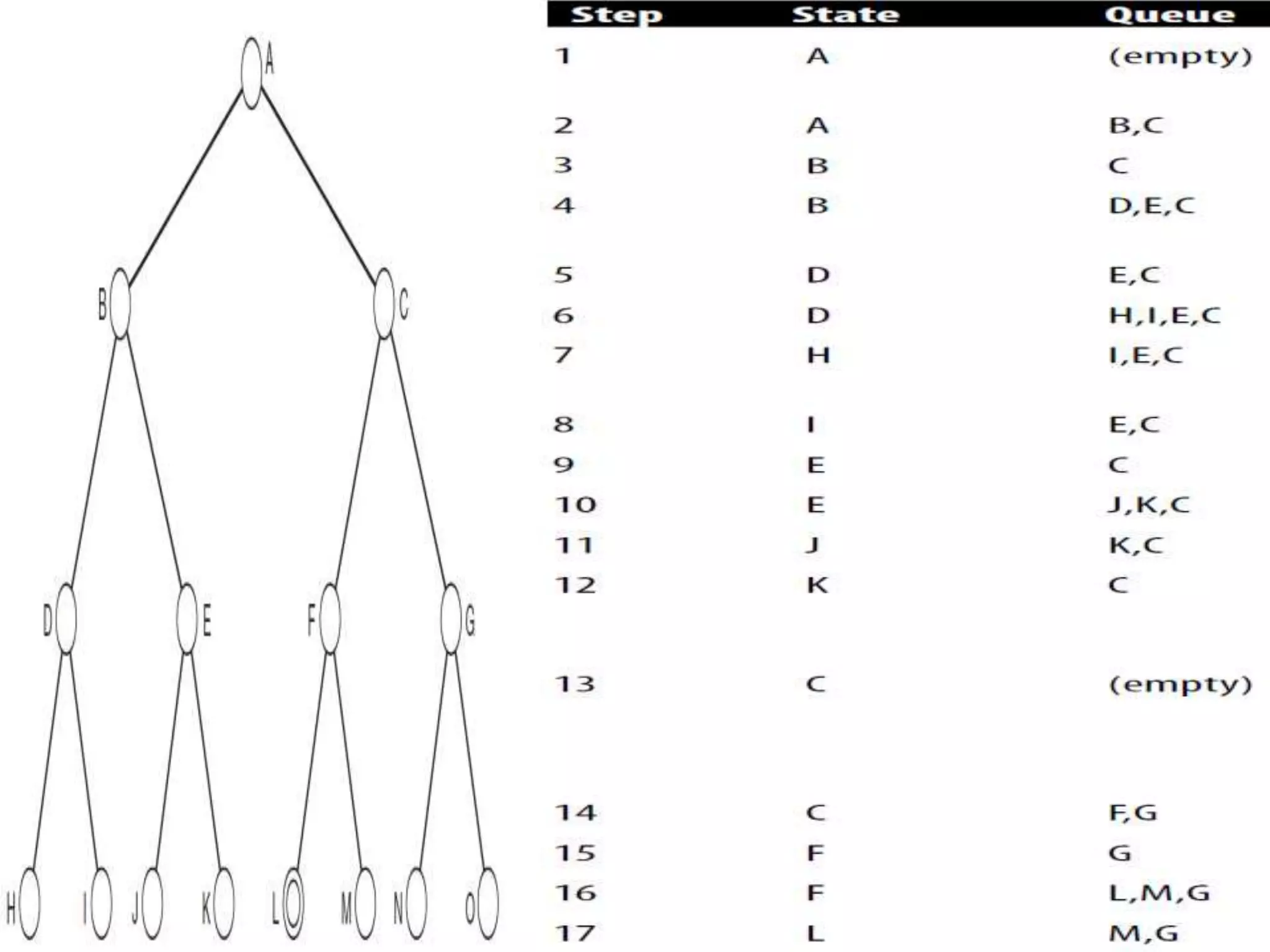
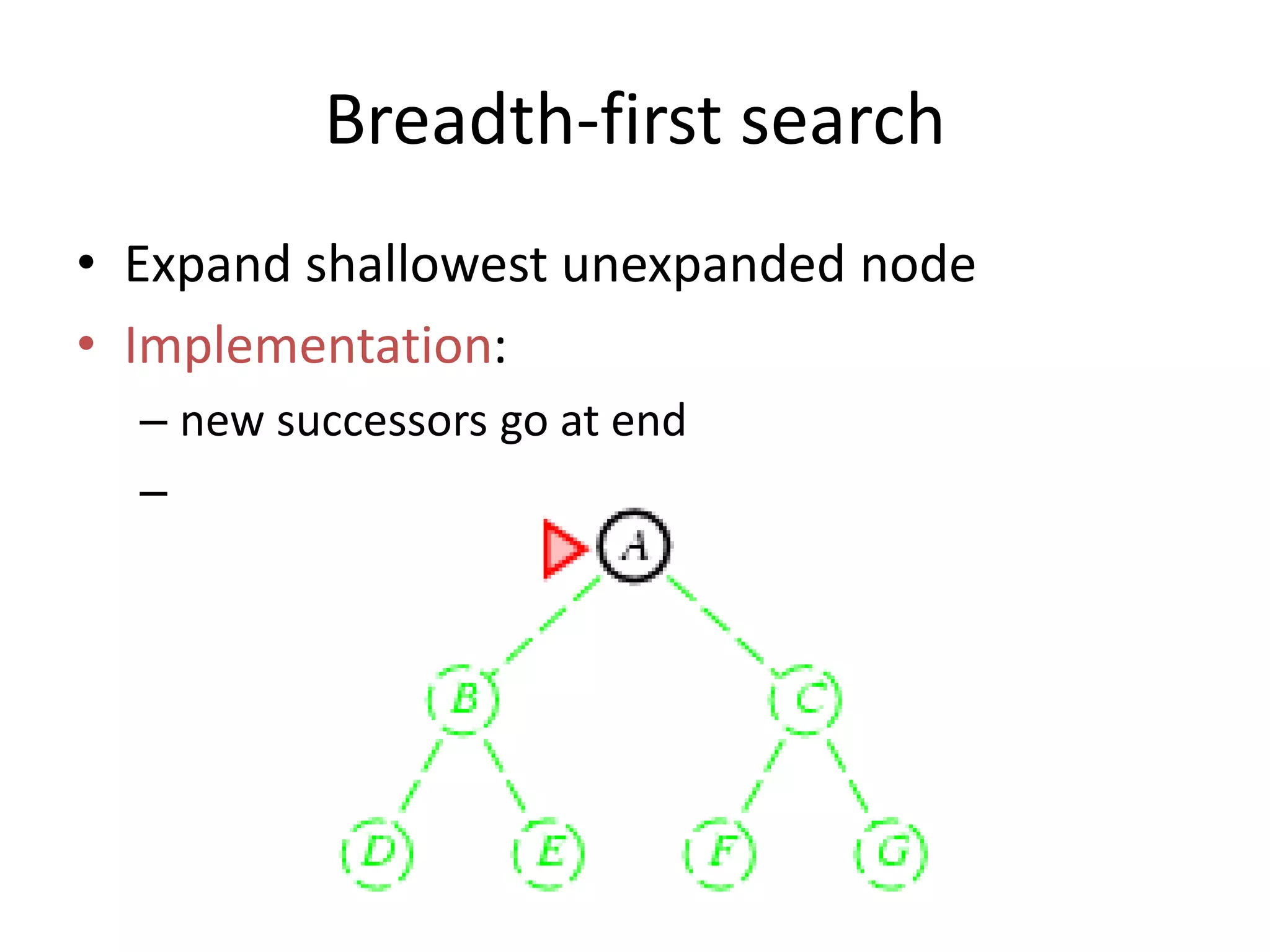
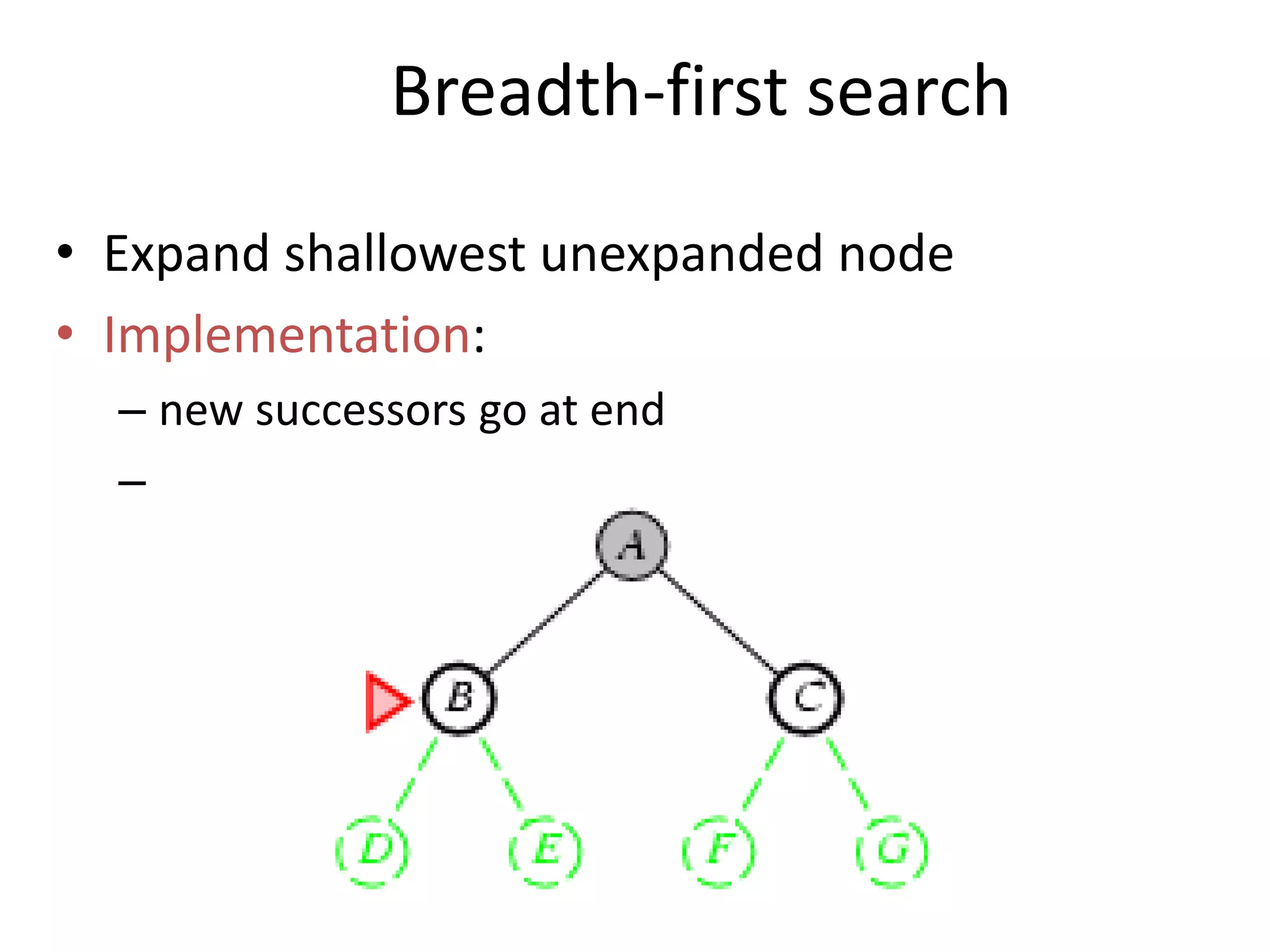
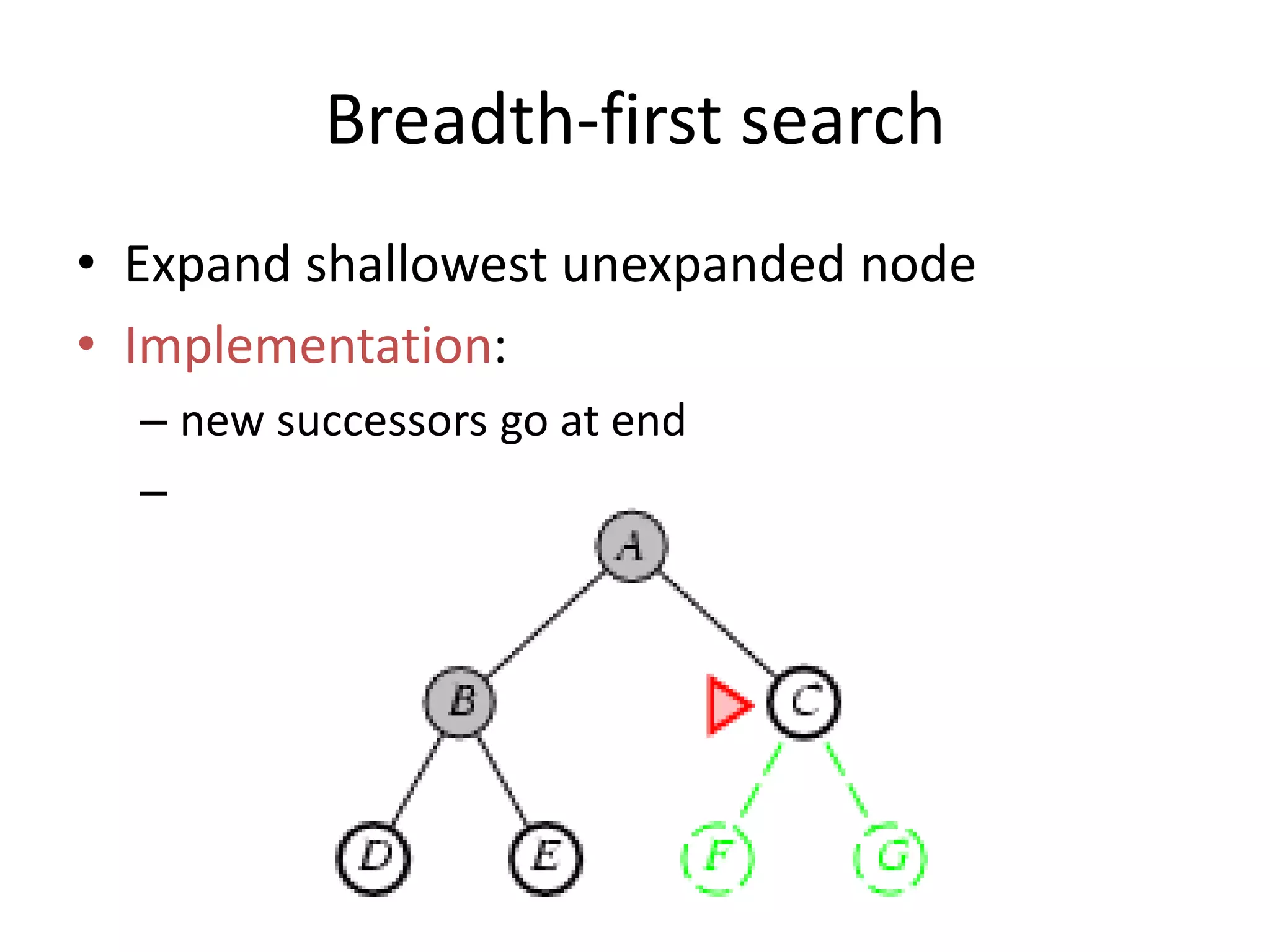
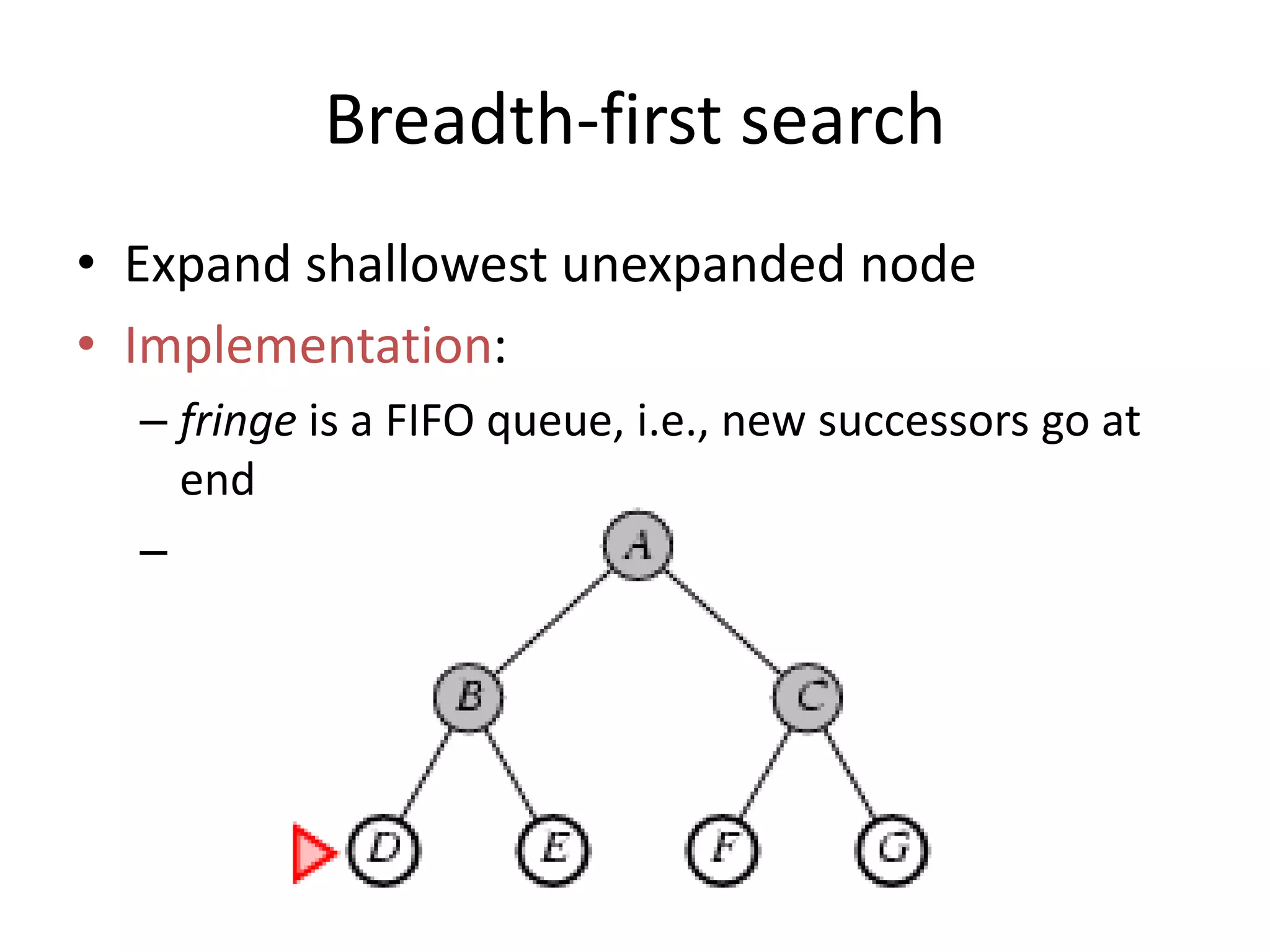
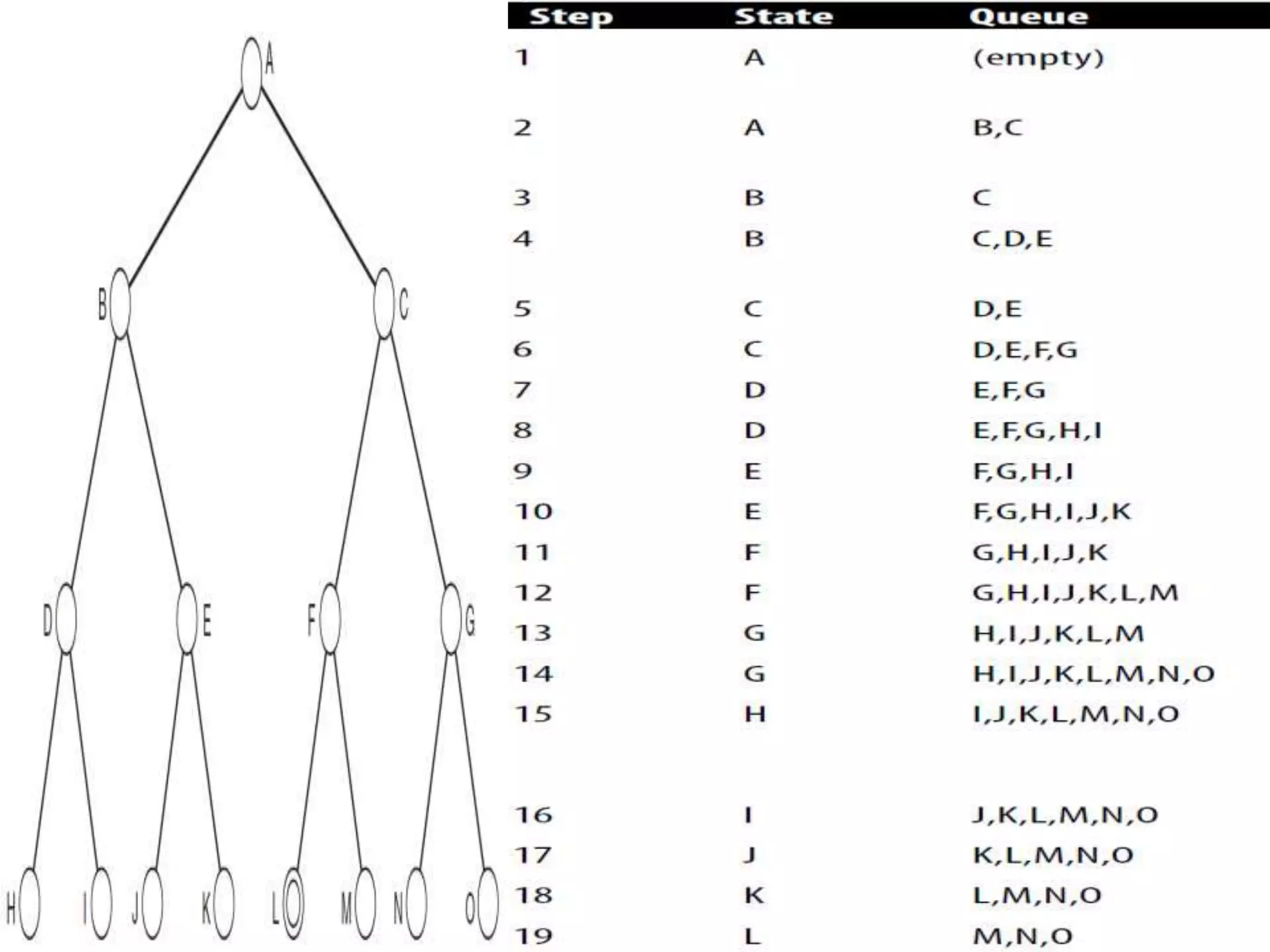
![Breadth-first search
Function breadth ()
{
queue = []; // initialize an empty queue
state = root_node; // initialize the start state
while (true)
{
if is_goal (state)
then return SUCCESS
else add_to_back_of_queue (successors (state));
if queue == []
then report FAILURE;
state = queue [0]; // state = first item in queue
remove_first_item_from (queue);
}
}](https://image.slidesharecdn.com/lecture3problemsolvingdfsbfsidf-220917173432-1e921a14/75/Lecture-3-Problem-Solving-DFS-BFS-IDF-pptx-36-2048.jpg)