Download to read offline
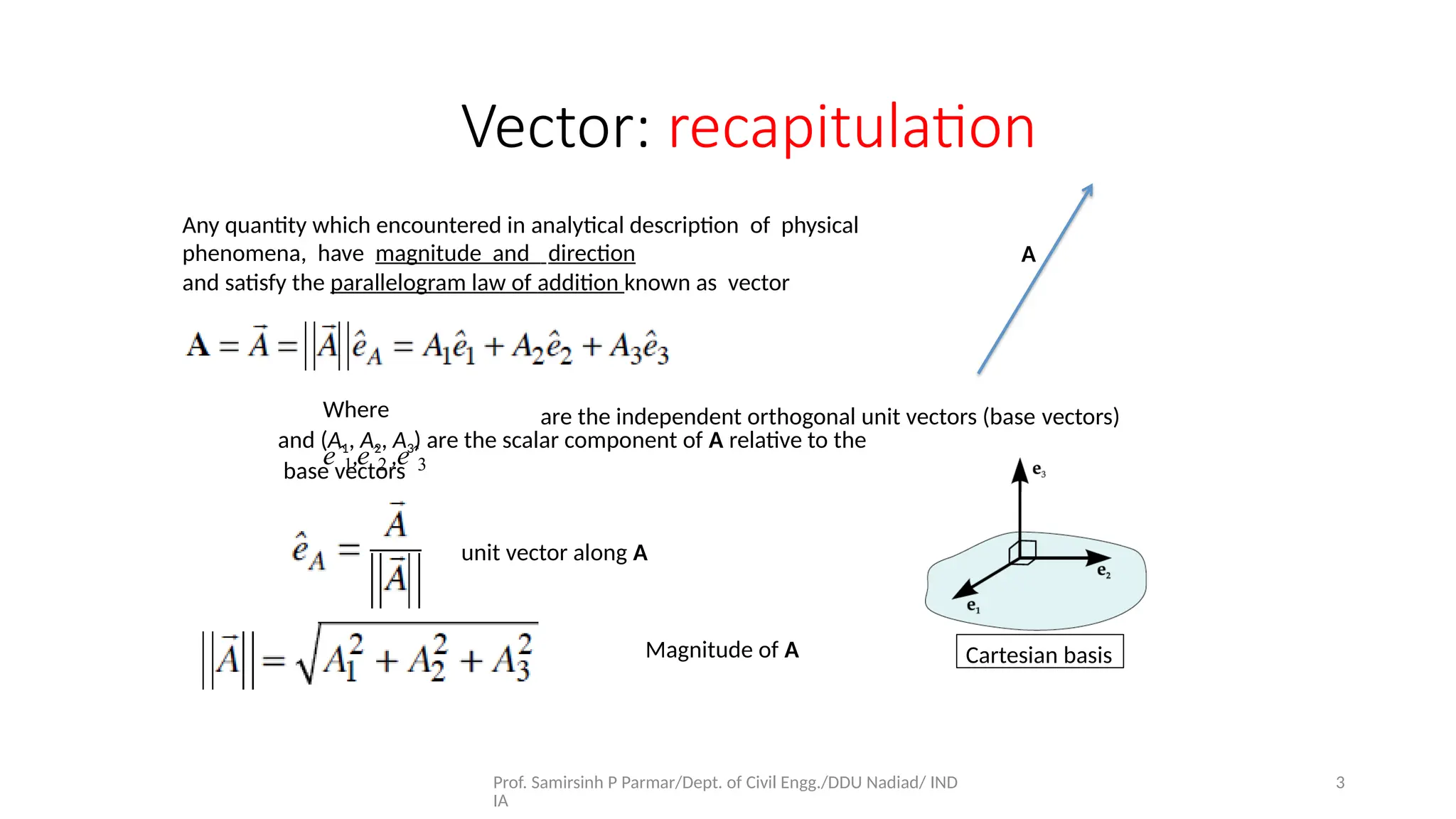
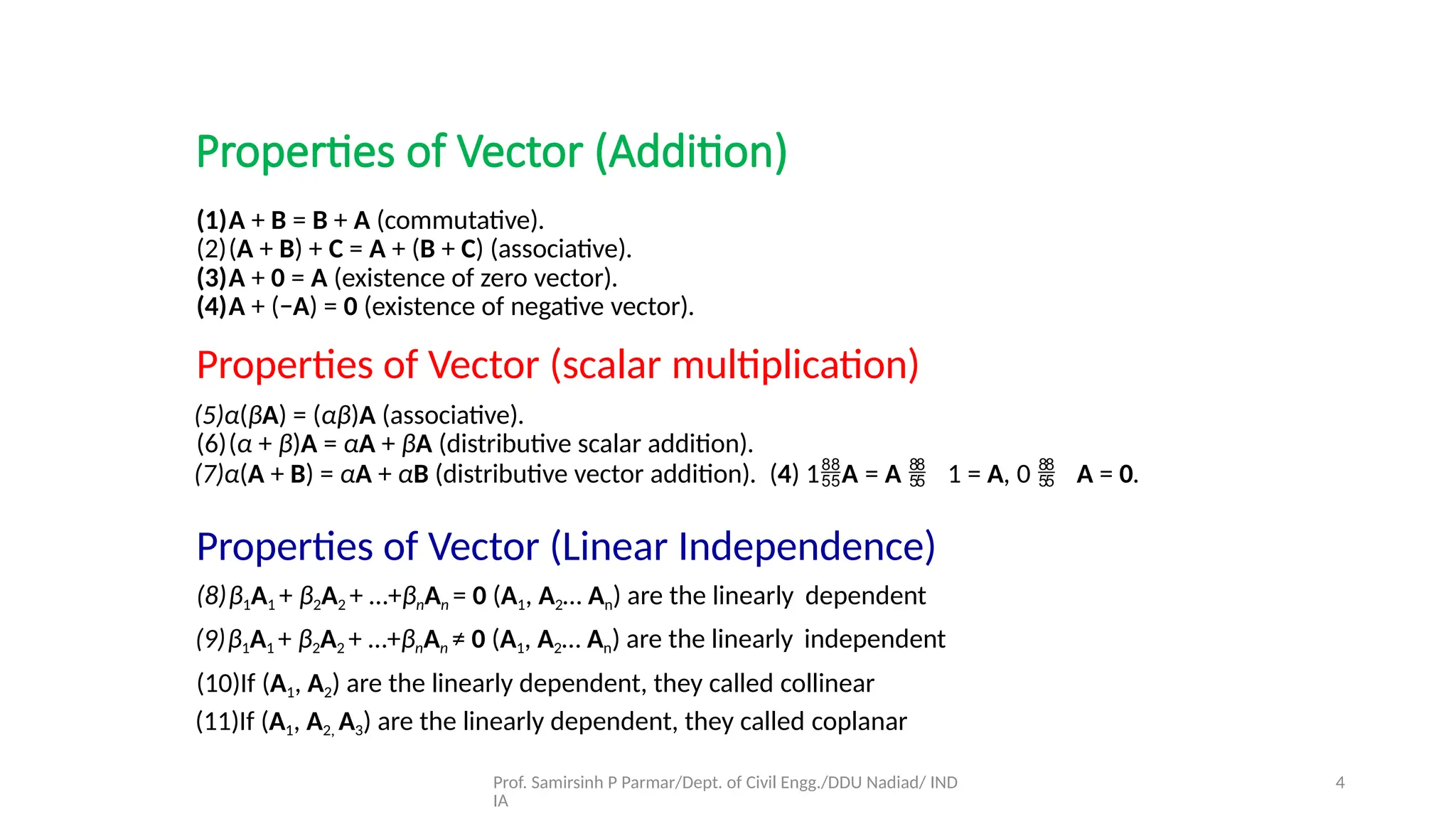
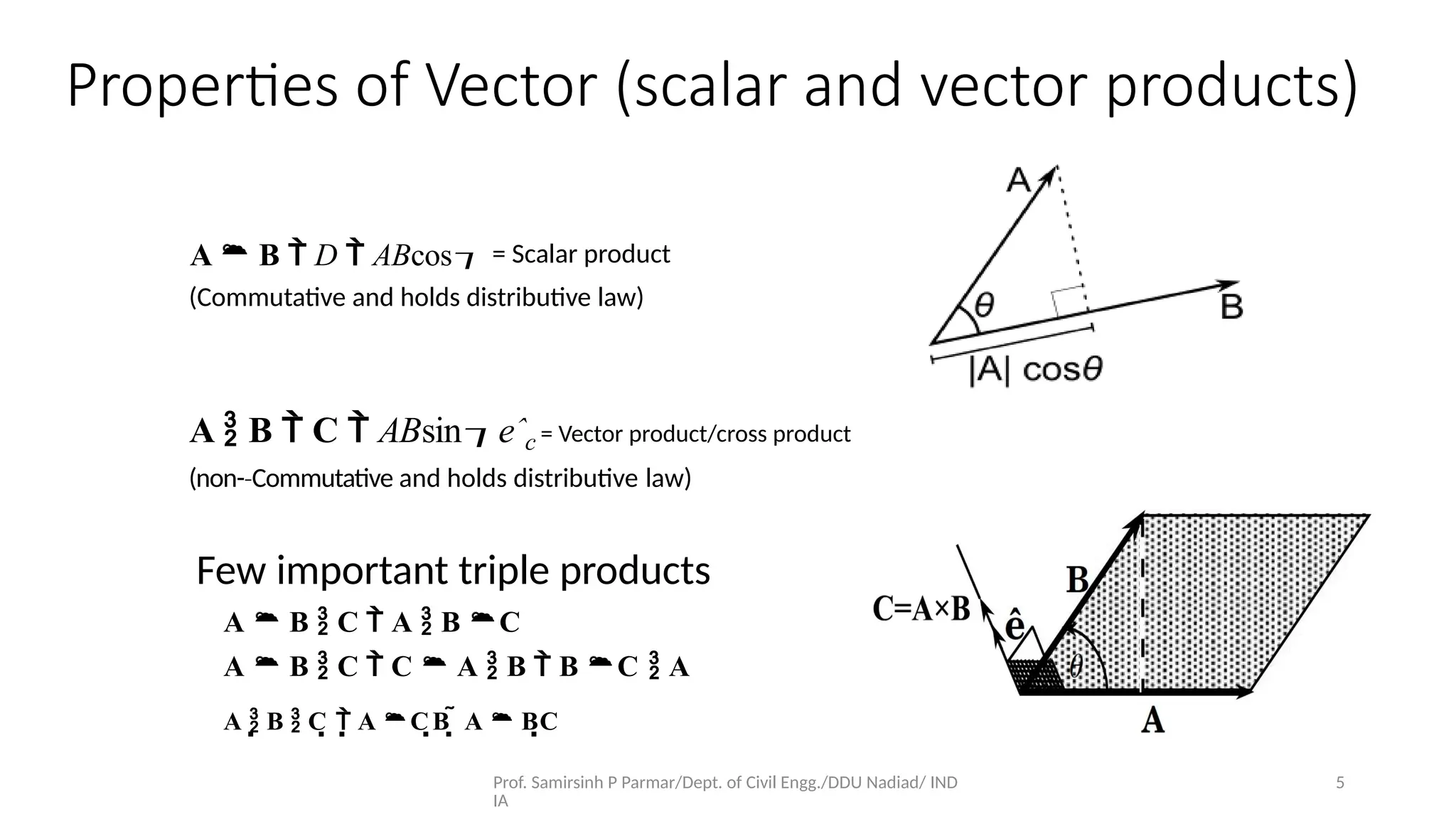
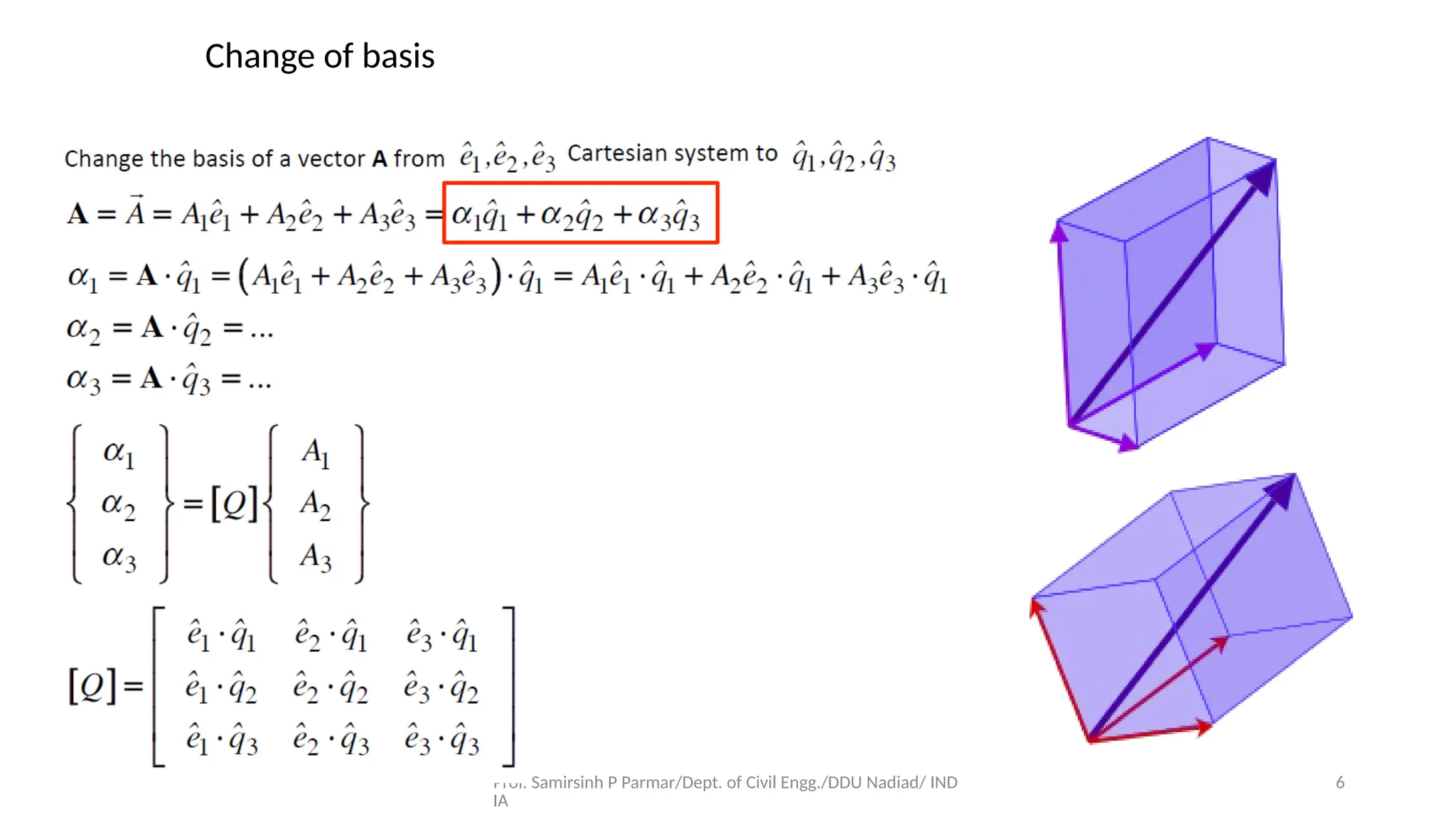
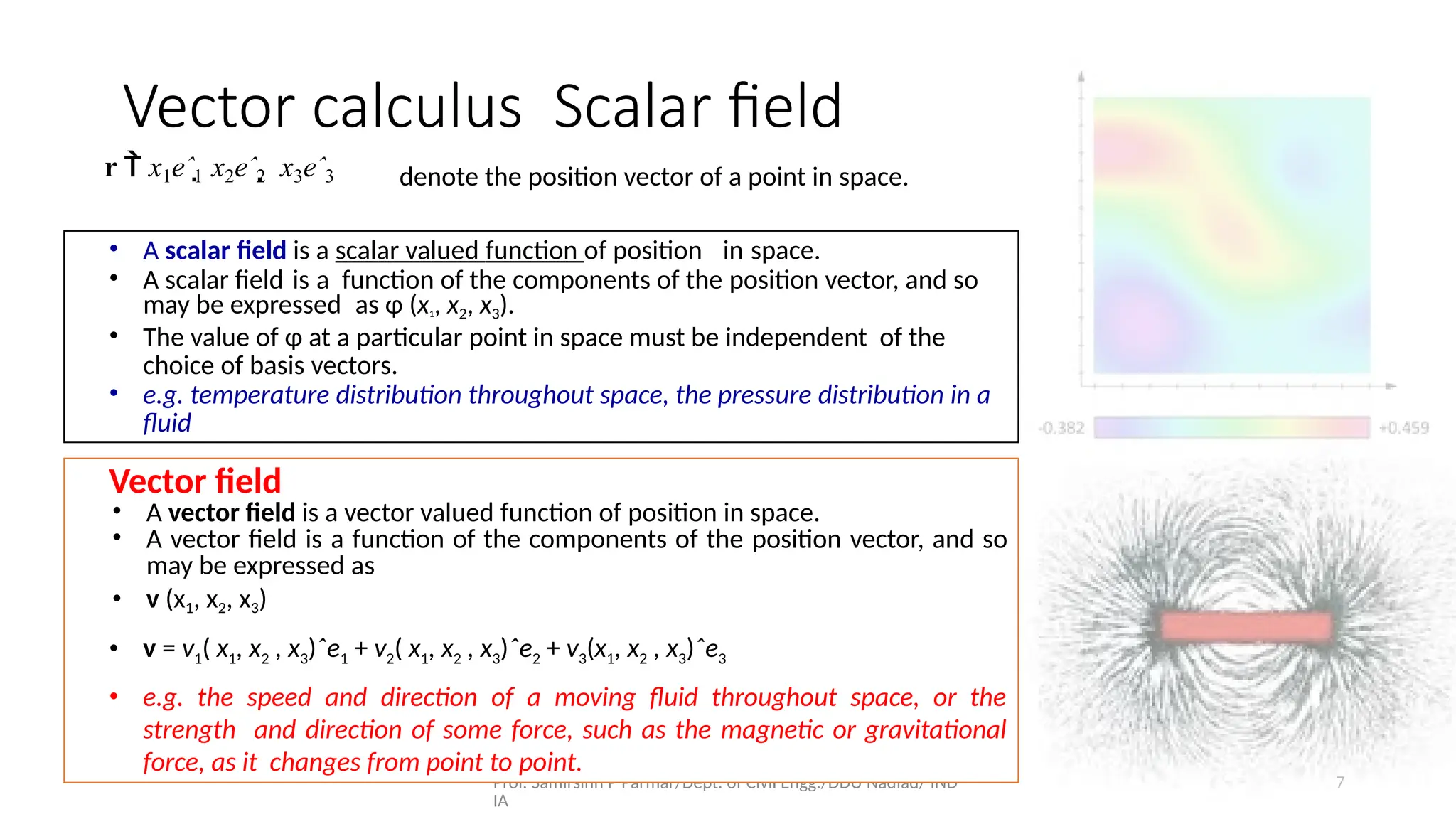
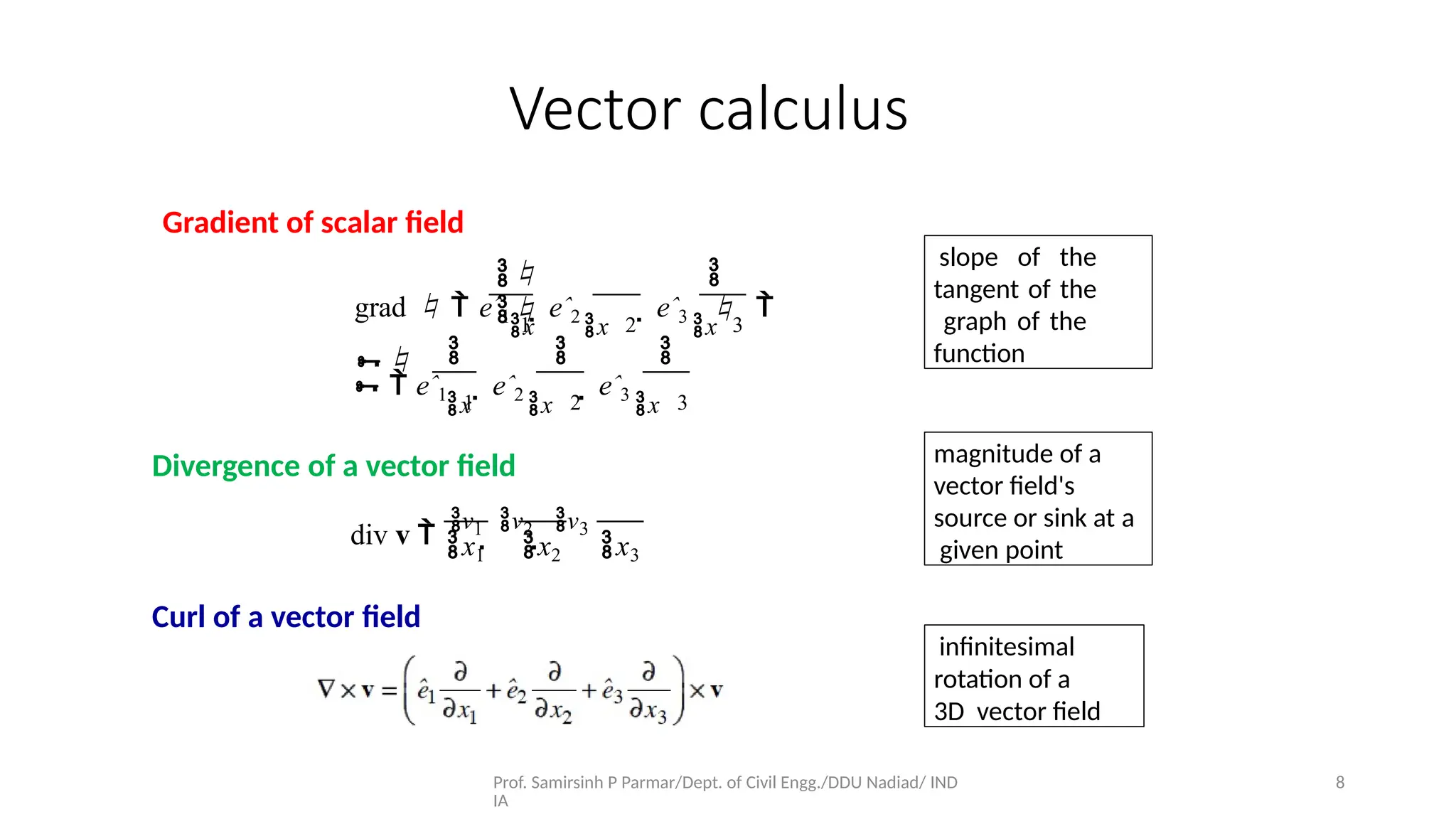
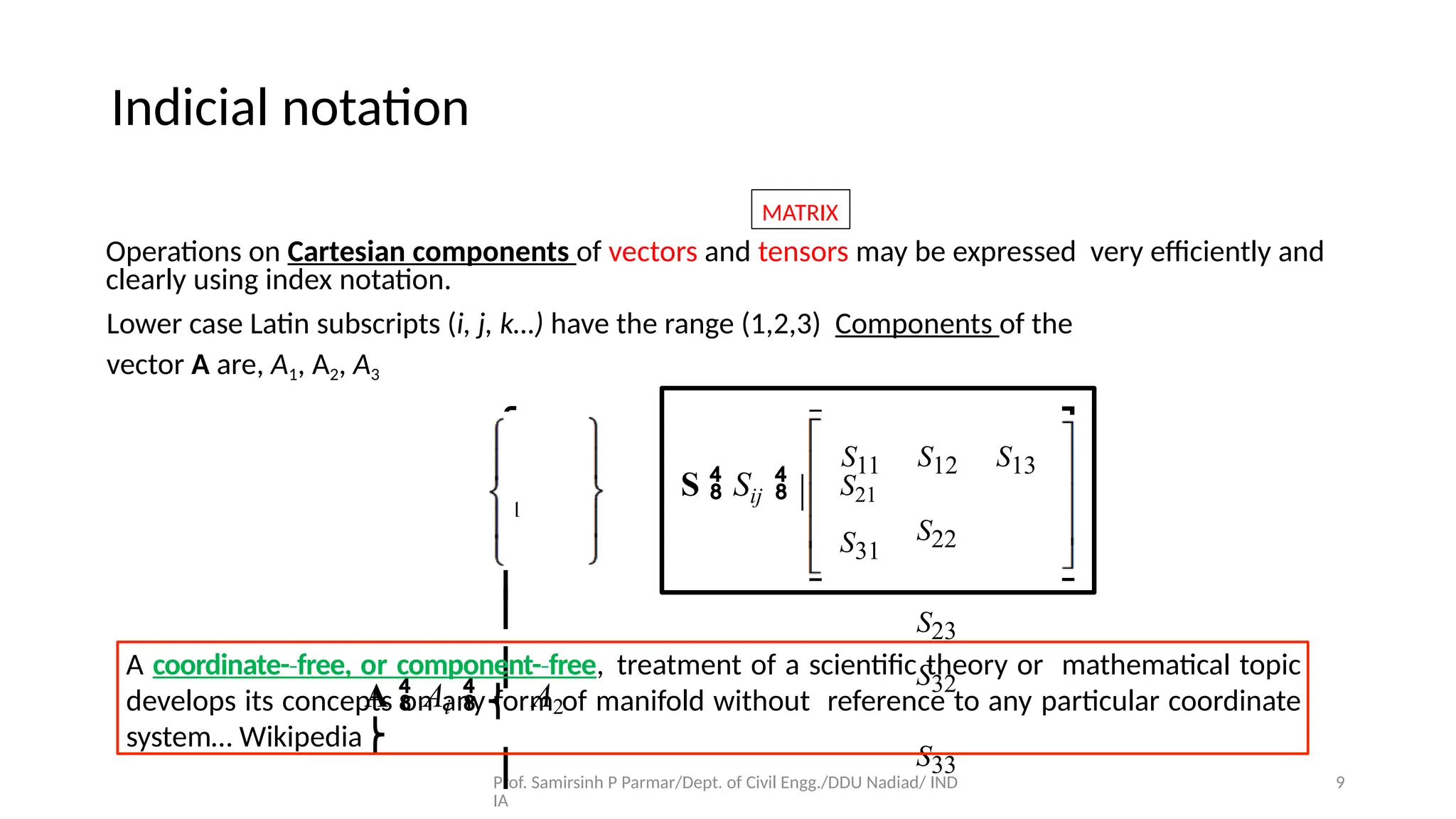

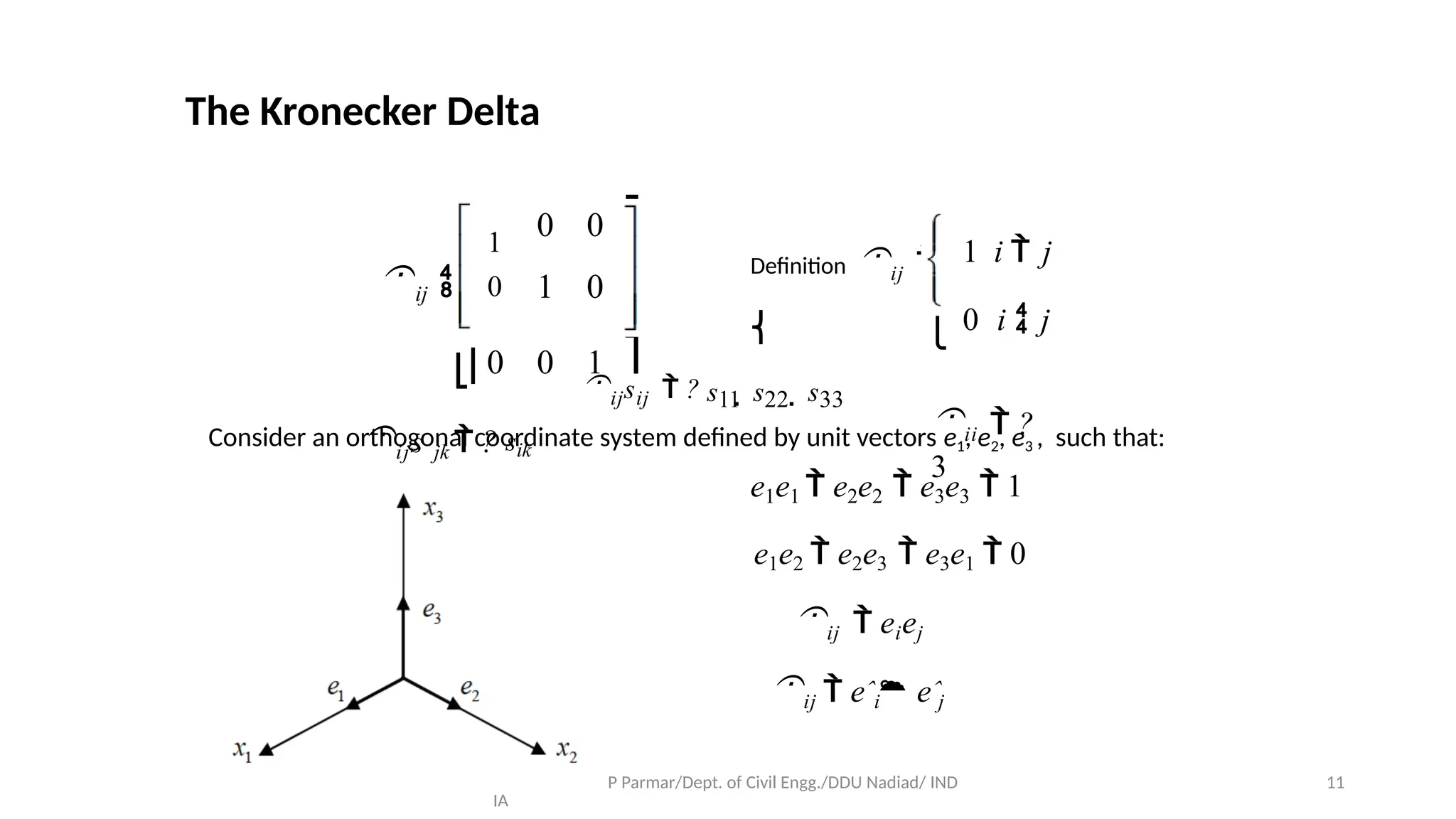
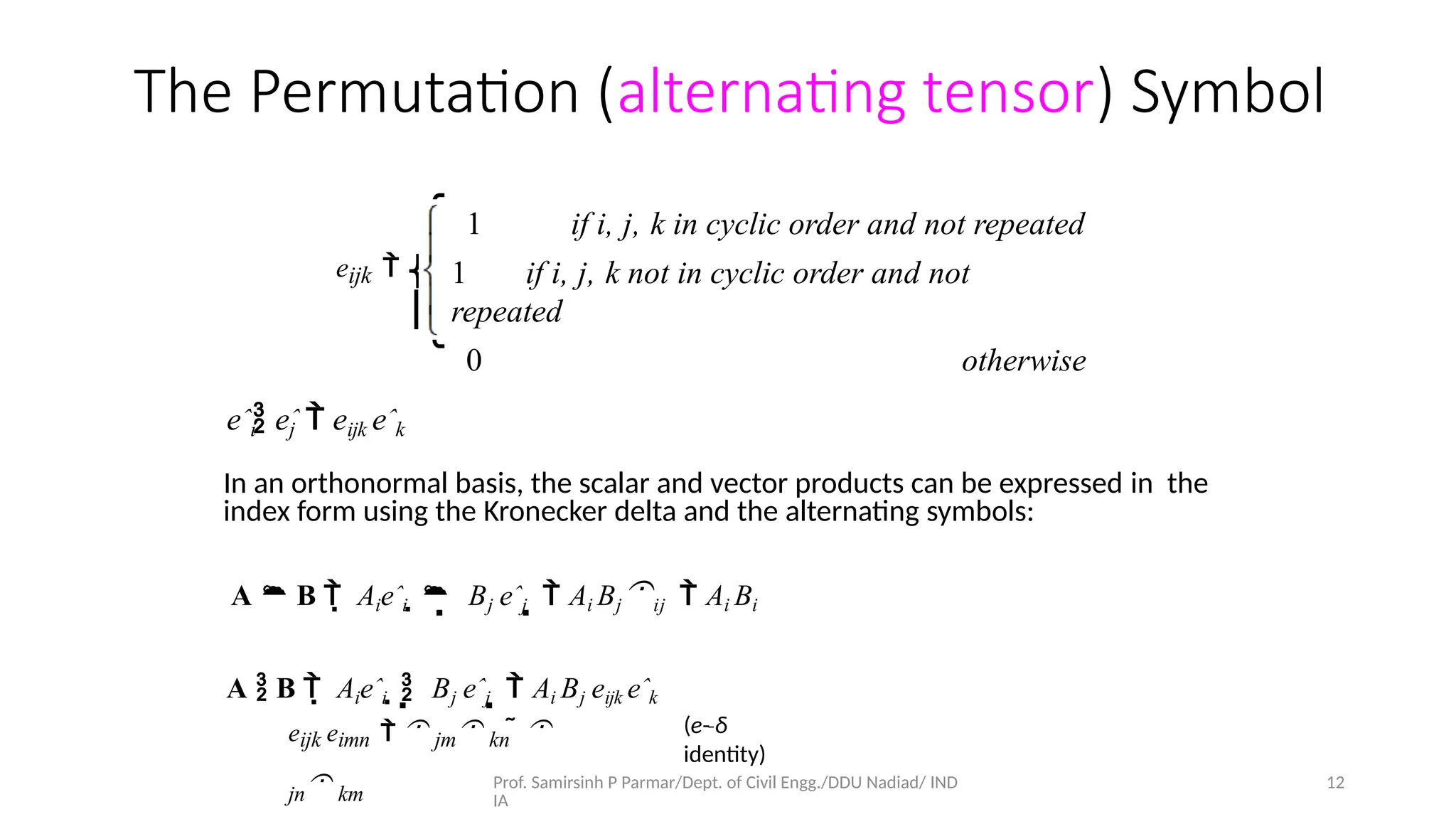
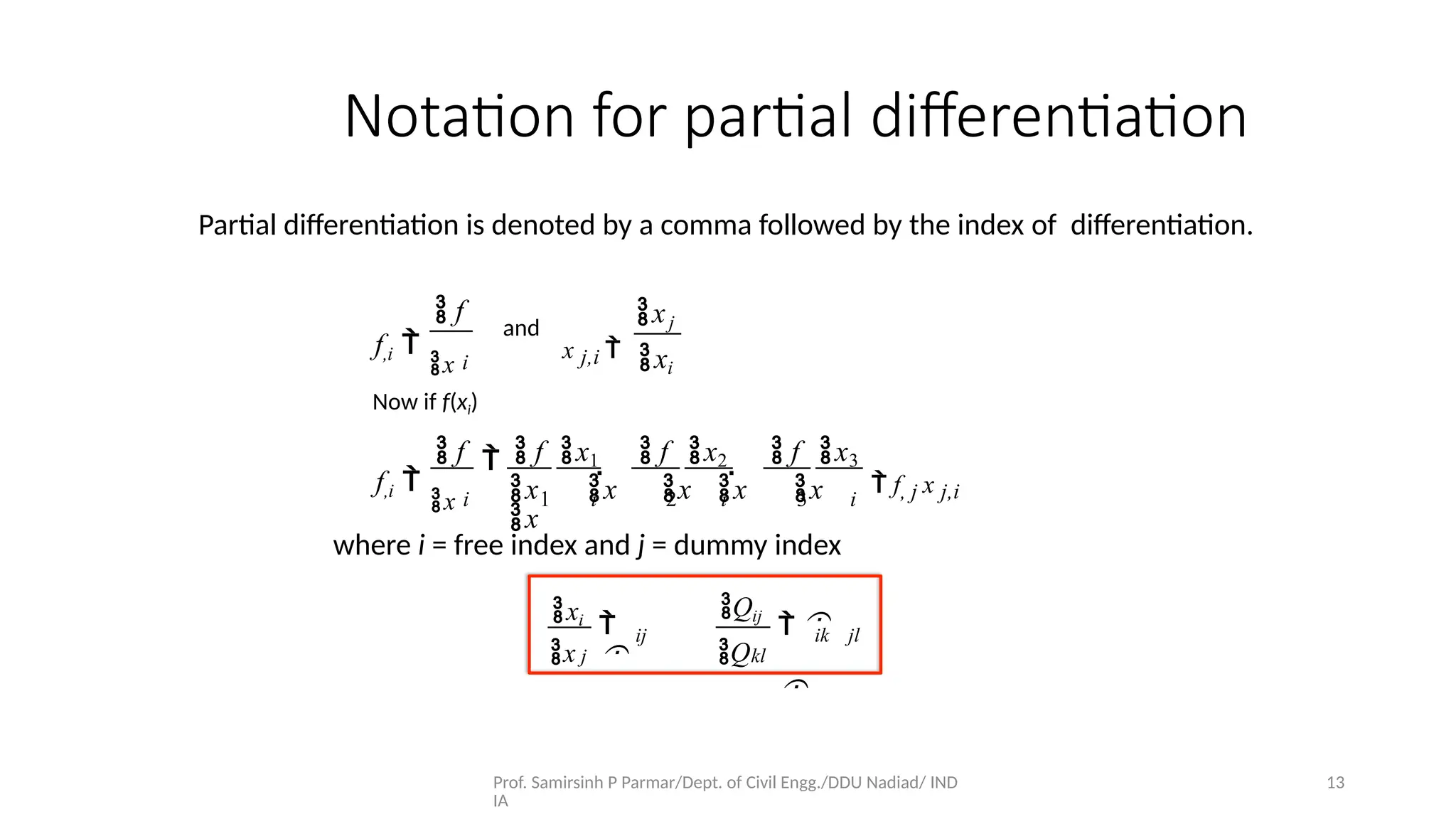
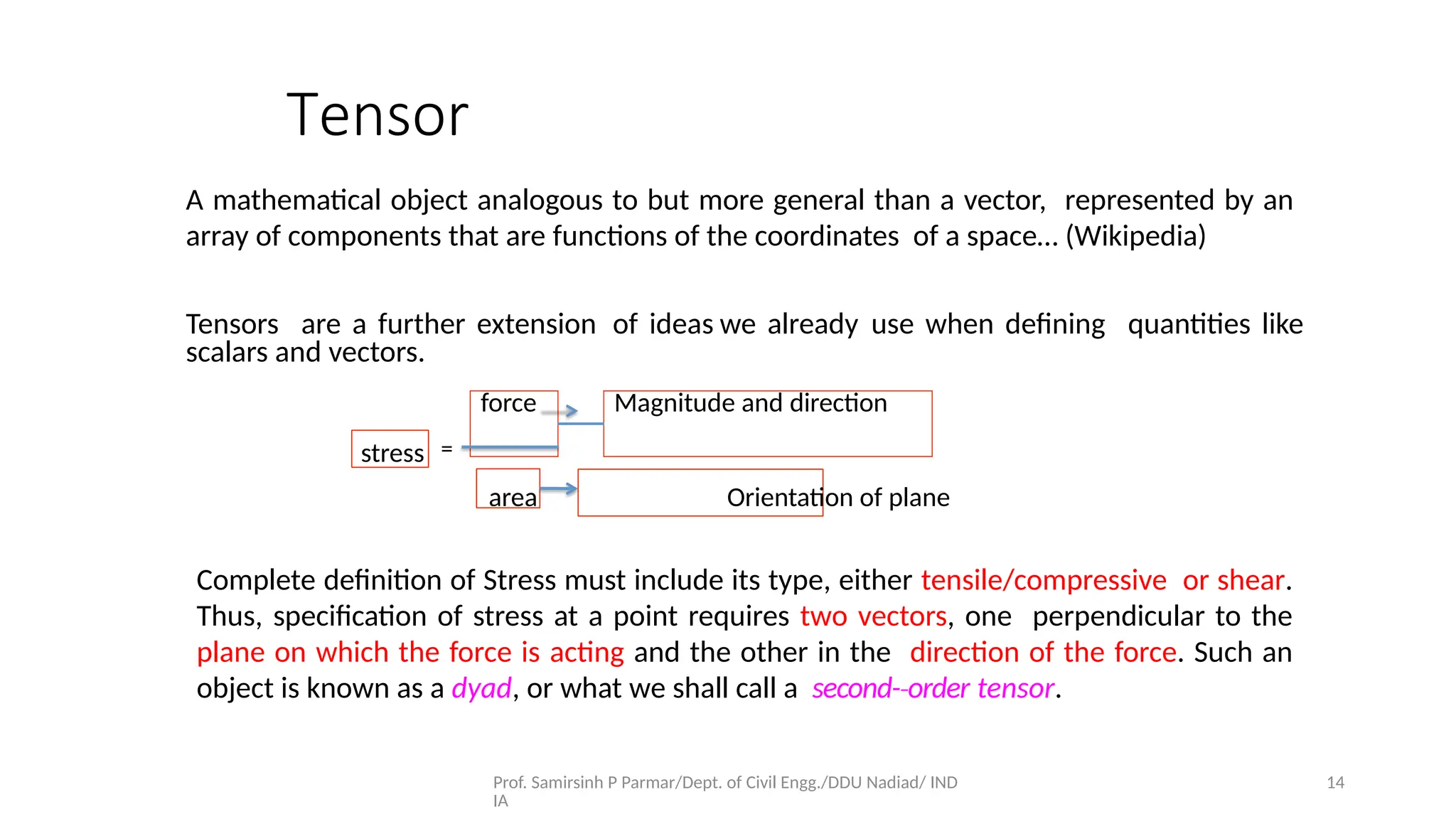
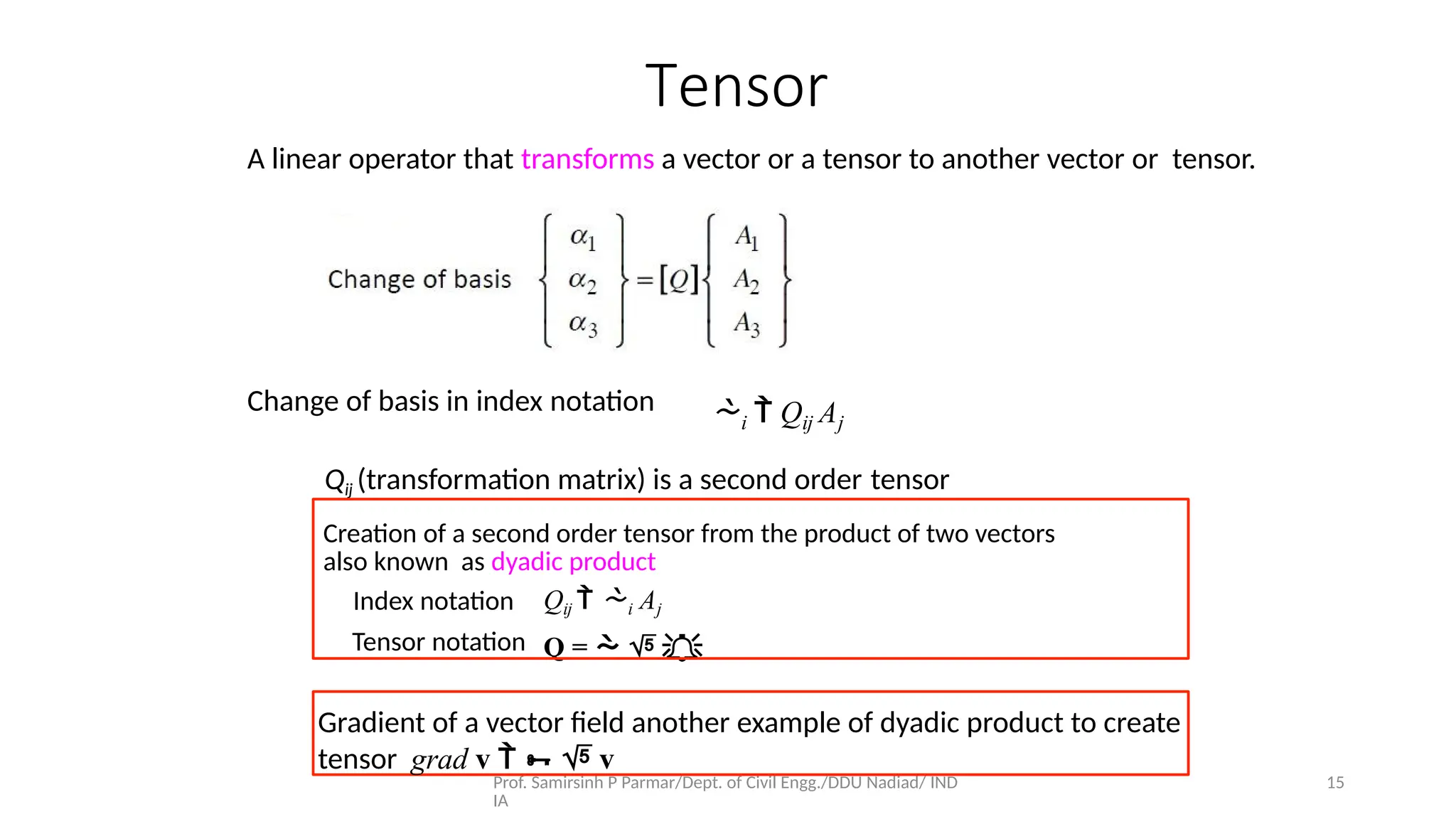
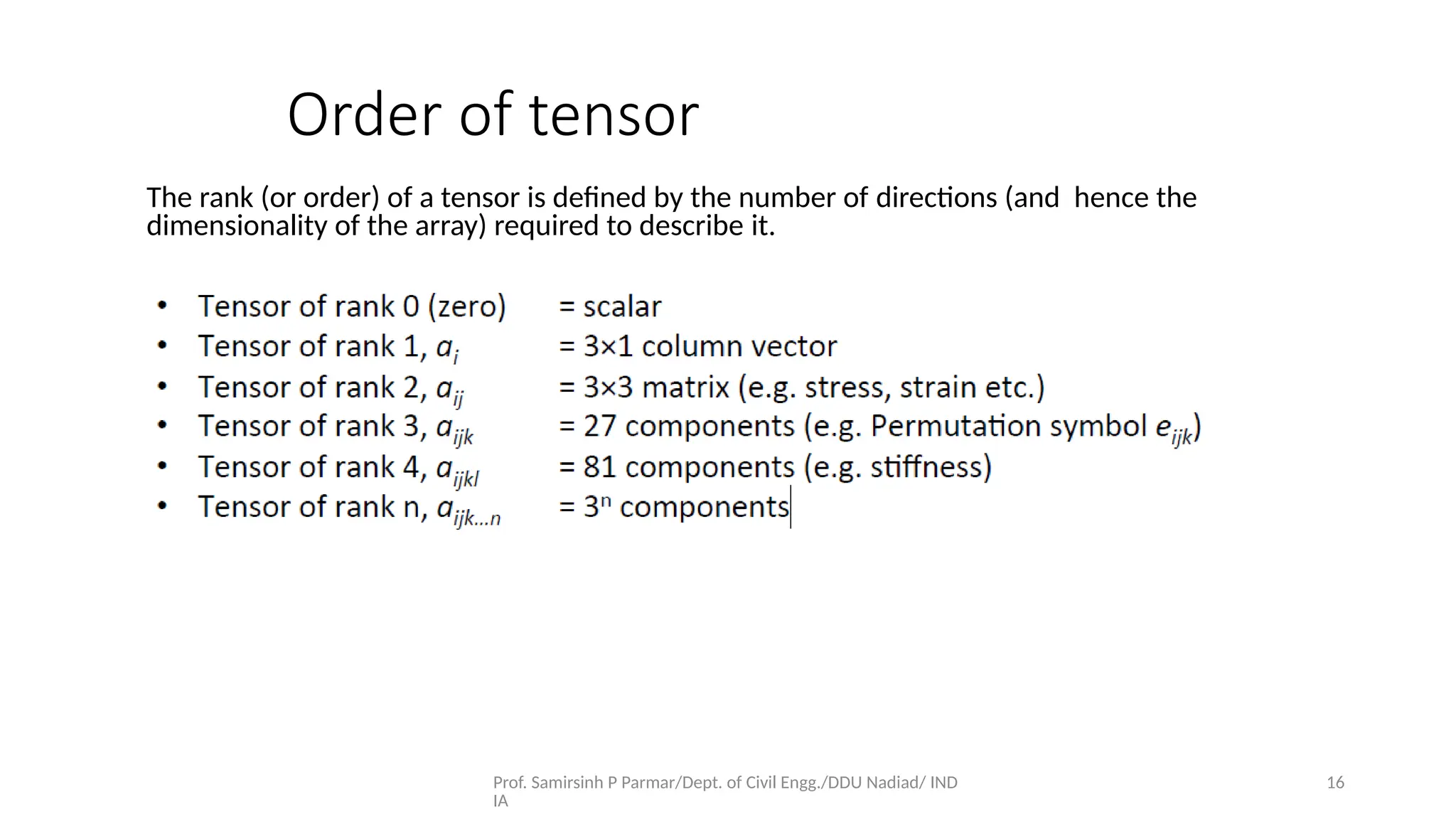



The document discusses tensor algebra and its applications in continuum mechanics, focusing on vector properties, scalar and vector fields, and matrix operations using index notation. It elaborates on the concepts of vectors, tensors, and their mathematical representations, including gradient, divergence, and curl. The content is intended for academic purposes and encourages the free distribution of knowledge.



































































