Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
openrtm
1,963 views
Japan Robot Week 2016 RTM講習会 第3部
Japan Robot Week 2016 RTM講習会 第3部
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 9
2
/ 9
3
/ 9
4
/ 9
5
/ 9
6
/ 9
7
/ 9
8
/ 9
9
/ 9
More Related Content
PPT
170622 02
by
openrtm
PPTX
Japan Robot Week 2016 RTM講習会 第1部
by
Noriaki Ando
PDF
160705-w03 RTミドルウエア講習会・早稲田大
by
openrtm
PDF
マネージャーやコンポーネントのコンポジット化
by
openrtm
PDF
160705-02 RTミドルウエア講習会・名城大
by
openrtm
PDF
Rtコンポーネント作成入門
by
openrtm
PDF
ROBOMECH2017 RTM講習会 第1部・その1
by
openrtm
PDF
190605 04
by
openrtm
170622 02
by
openrtm
Japan Robot Week 2016 RTM講習会 第1部
by
Noriaki Ando
160705-w03 RTミドルウエア講習会・早稲田大
by
openrtm
マネージャーやコンポーネントのコンポジット化
by
openrtm
160705-02 RTミドルウエア講習会・名城大
by
openrtm
Rtコンポーネント作成入門
by
openrtm
ROBOMECH2017 RTM講習会 第1部・その1
by
openrtm
190605 04
by
openrtm
What's hot
PDF
2016 summercamp 効率よいRTシステム運用法
by
openrtm
PPTX
Rtshell 2017
by
openrtm
PDF
OpenRTM-aistおよび RTコンポーネントプログラミングの概要
by
openrtm
PDF
RTミドルウェア応用実習
by
openrtm
PDF
171128 01
by
openrtm
PDF
RTミドルウェア強化月間2017 in 東京都立産業技術研究センター・RTミドルウェア講習会
by
Noriaki Ando
PDF
160705-01 RTミドルウエア講習会・名城大
by
openrtm
PDF
RTコンポーネント作成入門
by
openrtm
PDF
Rtミドルウェア講習会 第2部資料
by
openrtm
PDF
2016 summercamp SysML講習会
by
openrtm
PDF
2017 summercamp 04
by
openrtm
PDF
170622-01
by
openrtm
PDF
Robomec2015講習会 150517 01
by
openrtm
PDF
2016 summercamp RTM-ROS相互運用とJSKでの取り組み
by
openrtm
PDF
160705-w01 RTミドルウエア講習会・早稲田大
by
openrtm
PDF
Rtミドルウェア講習会@名城大 20140624 1
by
openrtm
PDF
2016 summercamp rtshell入門
by
openrtm
PDF
Rtミドルウェア講習会 第1部資料
by
openrtm
PDF
Rtshell入門
by
openrtm
PDF
OpenRTM-aist入門
by
Yuki Suga
2016 summercamp 効率よいRTシステム運用法
by
openrtm
Rtshell 2017
by
openrtm
OpenRTM-aistおよび RTコンポーネントプログラミングの概要
by
openrtm
RTミドルウェア応用実習
by
openrtm
171128 01
by
openrtm
RTミドルウェア強化月間2017 in 東京都立産業技術研究センター・RTミドルウェア講習会
by
Noriaki Ando
160705-01 RTミドルウエア講習会・名城大
by
openrtm
RTコンポーネント作成入門
by
openrtm
Rtミドルウェア講習会 第2部資料
by
openrtm
2016 summercamp SysML講習会
by
openrtm
2017 summercamp 04
by
openrtm
170622-01
by
openrtm
Robomec2015講習会 150517 01
by
openrtm
2016 summercamp RTM-ROS相互運用とJSKでの取り組み
by
openrtm
160705-w01 RTミドルウエア講習会・早稲田大
by
openrtm
Rtミドルウェア講習会@名城大 20140624 1
by
openrtm
2016 summercamp rtshell入門
by
openrtm
Rtミドルウェア講習会 第1部資料
by
openrtm
Rtshell入門
by
openrtm
OpenRTM-aist入門
by
Yuki Suga
Viewers also liked
PDF
Japan Robot Week 2016 RTM講習会 第2部
by
openrtm
PDF
ROBOMECH2017 インターネットを利用したロボットサービスとRSiの取り組み2017
by
openrtm
PDF
rosjp10 itとrt(ネットワーク技術と時々、仮想化) 株式会社インテック
by
Tatsuya Fukuta
PPTX
暗号通貨勉強会
by
Kohei Ogawa
PPTX
簡単、クレカ決済! PAY.JPを使ったクレカ決済の仕組み・開発運用時の考慮点について
by
dcubeio
PDF
Dockerを使ったローカルでの開発から本番環境へのデプロイまで
by
Ryo Nakamaru
Japan Robot Week 2016 RTM講習会 第2部
by
openrtm
ROBOMECH2017 インターネットを利用したロボットサービスとRSiの取り組み2017
by
openrtm
rosjp10 itとrt(ネットワーク技術と時々、仮想化) 株式会社インテック
by
Tatsuya Fukuta
暗号通貨勉強会
by
Kohei Ogawa
簡単、クレカ決済! PAY.JPを使ったクレカ決済の仕組み・開発運用時の考慮点について
by
dcubeio
Dockerを使ったローカルでの開発から本番環境へのデプロイまで
by
Ryo Nakamaru
Similar to Japan Robot Week 2016 RTM講習会 第3部
PDF
131106 03 i-rex2013
by
openrtm
PDF
190605 03
by
openrtm
PDF
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
PPTX
Raspberry pi+mono を使ってlegoを制御
by
Masuda Tomoaki
PDF
ABC 2012 Spring Robot Summit
by
三七男 山本
PDF
RTコンポーネント作成入門
by
openrtm
PDF
2013 summercamp 03
by
openrtm
PDF
Make: Ogaki Meeting 2012 Androidロボットサミットin大垣
by
三七男 山本
PPTX
レベルを上げて物理で殴る 16x9
by
Knit Tiger
PPTX
Xamarin+f#で操作する Raspberry Pi Robot
by
Masuda Tomoaki
PDF
181107 05
by
openrtm
PDF
RTM講習会 2部
by
openrtm
PPTX
Making a Drone by Python using RaspberryPi and Google VoiceKit
by
Lina Katayose
PDF
Python, RaspberryPi, Arduinoで作る消費電力モニタリングシステム
by
Junichi Kakisako
PPT
Raspberry pi で スマホリモコンでラジコンカーを動かすさっと動かす編
by
Kazuhiro Takahashi
PDF
機械学習 (AI/ML) 勉強会 #2 IoT編
by
Fujio Kojima
PDF
GoPiGo2で遊んでみた
by
Kazuyuki Mori
PDF
20130804 OSC京都 Raspberry Piに何かつないで遊ぼう
by
Yasuhiro Ishii
PDF
OSC Tokyo 2013 Spring JRPUG
by
Hideki Aoshima
PDF
KOGEI & KAIT Funnel WS
by
Shigeru Kobayashi
131106 03 i-rex2013
by
openrtm
190605 03
by
openrtm
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
Raspberry pi+mono を使ってlegoを制御
by
Masuda Tomoaki
ABC 2012 Spring Robot Summit
by
三七男 山本
RTコンポーネント作成入門
by
openrtm
2013 summercamp 03
by
openrtm
Make: Ogaki Meeting 2012 Androidロボットサミットin大垣
by
三七男 山本
レベルを上げて物理で殴る 16x9
by
Knit Tiger
Xamarin+f#で操作する Raspberry Pi Robot
by
Masuda Tomoaki
181107 05
by
openrtm
RTM講習会 2部
by
openrtm
Making a Drone by Python using RaspberryPi and Google VoiceKit
by
Lina Katayose
Python, RaspberryPi, Arduinoで作る消費電力モニタリングシステム
by
Junichi Kakisako
Raspberry pi で スマホリモコンでラジコンカーを動かすさっと動かす編
by
Kazuhiro Takahashi
機械学習 (AI/ML) 勉強会 #2 IoT編
by
Fujio Kojima
GoPiGo2で遊んでみた
by
Kazuyuki Mori
20130804 OSC京都 Raspberry Piに何かつないで遊ぼう
by
Yasuhiro Ishii
OSC Tokyo 2013 Spring JRPUG
by
Hideki Aoshima
KOGEI & KAIT Funnel WS
by
Shigeru Kobayashi
More from openrtm
PDF
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
PPTX
ピッキングシステム
by
openrtm
PPTX
GNGを使った未知環境における経路計画
by
openrtm
PPTX
まねっこロボット
by
openrtm
PDF
商品自動補充ロボットシステム
by
openrtm
PPTX
RTサマーキャンプ2022最終発表_都立大.pptx
by
openrtm
PDF
SysML実習20220822SC_GA.pdf
by
openrtm
PDF
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
PDF
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
PDF
5.総合演習(2)
by
openrtm
PDF
4.総合演習(1)
by
openrtm
PDF
3.RTCプログラミング演習
by
openrtm
PDF
2.プログラミングの基礎
by
openrtm
PDF
1.コース概要
by
openrtm
PDF
OpenRTM概要
by
openrtm
PDF
Slam実習
by
openrtm
PDF
Rtミドルウェアサマーキャンプ2021_宮本信彦
by
openrtm
PDF
RTミドルウェアサマーキャンプ2021_坂本武志_1
by
openrtm
PPTX
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
by
openrtm
PDF
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
ピッキングシステム
by
openrtm
GNGを使った未知環境における経路計画
by
openrtm
まねっこロボット
by
openrtm
商品自動補充ロボットシステム
by
openrtm
RTサマーキャンプ2022最終発表_都立大.pptx
by
openrtm
SysML実習20220822SC_GA.pdf
by
openrtm
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
5.総合演習(2)
by
openrtm
4.総合演習(1)
by
openrtm
3.RTCプログラミング演習
by
openrtm
2.プログラミングの基礎
by
openrtm
1.コース概要
by
openrtm
OpenRTM概要
by
openrtm
Slam実習
by
openrtm
Rtミドルウェアサマーキャンプ2021_宮本信彦
by
openrtm
RTミドルウェアサマーキャンプ2021_坂本武志_1
by
openrtm
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
by
openrtm
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
Japan Robot Week 2016 RTM講習会 第3部
1.
第3部 プログラミング実習 宮本 信彦 独立行政法人産業技術総合研究所 ロボットイノベーション研究センター ロボットソフトウェアプラットフォーム研究チーム
2.
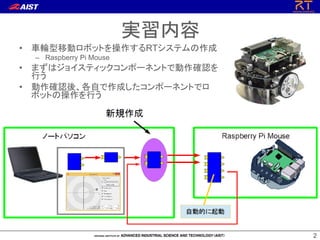
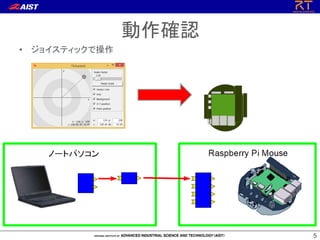
22 • 車輪型移動ロボットを操作するRTシステムの作成 – Raspberry
Pi Mouse • まずはジョイスティックコンポーネントで動作確認を 行う • 動作確認後、各自で作成したコンポーネントでロ ボットの操作を行う 実習内容
3.
33 • Japan Robot
Week 2016講習会のページから以下のページに移動 – チュートリアル(RaspberryPiマウス) – 配布のUSBメモリにもページを保存したものを同梱 • 「 JapanRobotWeek2016講習会」→「チュートリアル(Raspberry Pi Mouse) _ OpenRTM-aist.html」 チュートリアル
4.
44 • チュートリアルのページのリンクからダウンロード • USBメモリにも同梱 –
「 JapanRobotWeek2016講習会」→「openrtm_tutorial」 サンプルのRTC等のダウンロード
5.
55 • ジョイスティックで操作 動作確認
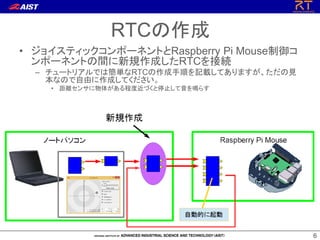
6.
66 • ジョイスティックコンポーネントとRaspberry Pi
Mouse制御コ ンポーネントの間に新規作成したRTCを接続 – チュートリアルでは簡単なRTCの作成手順を記載してありますが、ただの見 本なので自由に作成してください。 • 距離センサに物体がある程度近づくと停止して音を鳴らす RTCの作成
7.
77 • 無線での接続を推奨しています – 一応、有線での接続も可 •
無線LAN接続時のパスワード – pi123openrtm • Raspberry Piを無線LANアクセスポイントとして接続を行うため、 インターネットに接続できなくなります。 – 事前にチュートリアルのページは保存しておくことをおすすめします。 • ノートPC側のネームサーバーはRaspberry Piと接続後に再起動 してください。 • 電源をオフにするときはボタン1(真ん中のボタン)を1秒ほど押し てシャットダウンしてから電源スイッチをオフにしてください。 – スイッチを直接切らないようにしてください。 注意事項
8.
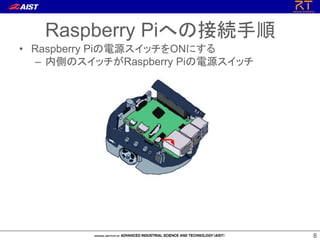
88 • Raspberry Piの電源スイッチをONにする –
内側のスイッチがRaspberry Piの電源スイッチ Raspberry Piへの接続手順
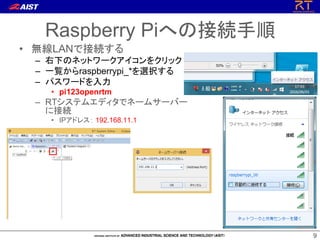
9.
99 • 無線LANで接続する – 右下のネットワークアイコンをクリック –
一覧からraspberrypi_*を選択する – パスワードを入力 • pi123openrtm – RTシステムエディタでネームサーバー に接続 • IPアドレス: 192.168.11.1 Raspberry Piへの接続手順
Download