Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
openrtm
1,033 views
SysML実習20220822SC_GA.pdf
RTミドルウエア SUMMER CAMP 2022 SysML実習
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 10
2
/ 10
3
/ 10
4
/ 10
5
/ 10
6
/ 10
7
/ 10
8
/ 10
9
/ 10
10
/ 10
More Related Content
PDF
2016 summercamp SysML講習会
by
openrtm
PDF
RTミドルウェアサマーキャンプ2021_坂本武志_1
by
openrtm
PDF
200824 SysML Tutorial
by
openrtm
PDF
2019 summercamp 01
by
openrtm
PPTX
RTミドルウェアサマーキャンプ2018「SysML実習」
by
openrtm
PDF
2016 summercamp RTコンポーネント開発のためのシステムモデリング講習会
by
openrtm
PDF
ROBOMECH2021 RTMオンライン講習会 第1部
by
openrtm
PPT
170622 02
by
openrtm
2016 summercamp SysML講習会
by
openrtm
RTミドルウェアサマーキャンプ2021_坂本武志_1
by
openrtm
200824 SysML Tutorial
by
openrtm
2019 summercamp 01
by
openrtm
RTミドルウェアサマーキャンプ2018「SysML実習」
by
openrtm
2016 summercamp RTコンポーネント開発のためのシステムモデリング講習会
by
openrtm
ROBOMECH2021 RTMオンライン講習会 第1部
by
openrtm
170622 02
by
openrtm
Similar to SysML実習20220822SC_GA.pdf
PDF
OpenRTM概要
by
openrtm
PDF
130522 rt講習会(説明用)
by
openrtm
PDF
RTミドルウェアによるロボットプログラミング技術 1.コース概要
by
Noriaki Ando
PDF
181106 01
by
openrtm
PDF
130711 01
by
openrtm
PPTX
200527 RTM Tutorial in ROBOMECH2020
by
openrtm
PDF
ROBOMECH2021 RTM講習会 第1部
by
openrtm
PDF
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
PDF
181106 03
by
openrtm
PDF
2016 summercamp 当研究室でのRTミドルウエアの取り組み
by
openrtm
PDF
1.コース概要
by
openrtm
PDF
RTミドルウエア: OpenRTM-aist概要
by
openrtm
PDF
Using SysML in an RTC-based Robotics Application
by
Kenji Hiranabe
PDF
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
PDF
RTコンポーネント作成入門
by
openrtm
PDF
iREX2015 RTM講習会
by
openrtm
PDF
RTミドルウェアによるロボットプログラミング技術 3. RTMによるプログラミング
by
Noriaki Ando
PDF
130522 01
by
openrtm
PDF
130711 02
by
openrtm
PDF
2015RTミドルウエア講習会
by
openrtm
OpenRTM概要
by
openrtm
130522 rt講習会(説明用)
by
openrtm
RTミドルウェアによるロボットプログラミング技術 1.コース概要
by
Noriaki Ando
181106 01
by
openrtm
130711 01
by
openrtm
200527 RTM Tutorial in ROBOMECH2020
by
openrtm
ROBOMECH2021 RTM講習会 第1部
by
openrtm
ROBOMECH2023 RTミドルウェア講習会 第1部
by
openrtm
181106 03
by
openrtm
2016 summercamp 当研究室でのRTミドルウエアの取り組み
by
openrtm
1.コース概要
by
openrtm
RTミドルウエア: OpenRTM-aist概要
by
openrtm
Using SysML in an RTC-based Robotics Application
by
Kenji Hiranabe
人工知能学会RTM講習会 第3部:プログラミング実習
by
openrtm
RTコンポーネント作成入門
by
openrtm
iREX2015 RTM講習会
by
openrtm
RTミドルウェアによるロボットプログラミング技術 3. RTMによるプログラミング
by
Noriaki Ando
130522 01
by
openrtm
130711 02
by
openrtm
2015RTミドルウエア講習会
by
openrtm
More from openrtm
PPTX
ピッキングシステム
by
openrtm
PPTX
GNGを使った未知環境における経路計画
by
openrtm
PPTX
まねっこロボット
by
openrtm
PDF
商品自動補充ロボットシステム
by
openrtm
PPTX
RTサマーキャンプ2022最終発表_都立大.pptx
by
openrtm
PDF
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
PDF
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
PDF
5.総合演習(2)
by
openrtm
PDF
4.総合演習(1)
by
openrtm
PDF
3.RTCプログラミング演習
by
openrtm
PDF
2.プログラミングの基礎
by
openrtm
PDF
Slam実習
by
openrtm
PDF
Rtshell入門
by
openrtm
PDF
Rtコンポーネント作成入門
by
openrtm
PDF
Rtミドルウェアサマーキャンプ2021_宮本信彦
by
openrtm
PPTX
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
by
openrtm
PDF
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
PDF
201111 05
by
openrtm
PDF
201111 04
by
openrtm
PDF
201110 03
by
openrtm
ピッキングシステム
by
openrtm
GNGを使った未知環境における経路計画
by
openrtm
まねっこロボット
by
openrtm
商品自動補充ロボットシステム
by
openrtm
RTサマーキャンプ2022最終発表_都立大.pptx
by
openrtm
RTミドルウェアサマーキャンプ資料2022.pdf
by
openrtm
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
5.総合演習(2)
by
openrtm
4.総合演習(1)
by
openrtm
3.RTCプログラミング演習
by
openrtm
2.プログラミングの基礎
by
openrtm
Slam実習
by
openrtm
Rtshell入門
by
openrtm
Rtコンポーネント作成入門
by
openrtm
Rtミドルウェアサマーキャンプ2021_宮本信彦
by
openrtm
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
by
openrtm
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
by
openrtm
201111 05
by
openrtm
201111 04
by
openrtm
201110 03
by
openrtm
SysML実習20220822SC_GA.pdf
1.
RTミドルウェア SUMMER CAMP
2022 SysML実習 日時:2022年8月22日(月) 14:30~ 株式会社 グローバルアシスト 坂本 武志
2.
2022.8.22 Copyright (C)
GLOBAL ASSIST Co., Ltd., All Rights Reserved. 2 本実習の目的 サマーキャンプを通して開発を行う対象システムの明確化 設計を行うのであれば,その場限りの独自記法で検討を行うのではなく,標 準となっている記法で検討を行って欲しい 開発したRTコンポーネント公開時に,設計情報も併せて公開して欲しい 後からRTコンポーネントを利用する人のため サマーキャンプでモデリングを行っている理由 開発内容の説明 どのようなシステムを開発するのか?何が特徴なのか?など チーム内での意思統一,進捗管理 何を開発するのか?どう実装するのか?など どこまで開発できているのか?
3.
2022.8.22 3 要求図 性能なども含めたシステムが満たすべき項目を表現 req
[model] 移動ロボッ ト [移動ロボ ット(自律 移動)] <<requirement>> 自律移 動 id = text = "ユーザが指定した 目的地まで,安全に移動で きること" <<requirement>> 障害 物回避 id = text = "ロボット周辺の障害 物を回避できること" <<requirement>> 経路生 成 id = text = "目的地までの移動 経路を自動で生成できるこ と" <<requirement>> 移動 id = text = "移動指令に従って 移動すること" <<requirement>> 自己位置 推定 id = text = "ロボット自身の現在 位置を推定できること" <<requirement>> 環境地 図 id = text = "周辺環境の地図を 持つこと" <<requirement>> 環 境地図マッ チング id = text = "周辺環境の地図と 外界計測センサの計測結 果からマッチングを行うこと" <<requirement>> デッド レコニング id = text = "内界センサの計測 値を基に,自分の位置を推 定できること" <<requirement>> 内 界センサ id = text = "ロボットの相対的な 移動量を計測できること" <<requirement>> 周 辺環境情報 の計測 id = text = "ロボット周辺の環境情 報を計測できること" <<requirement>> 移動時 間 id = text = "なるべく短い時間で 目的地まで到達できること" <<requirement>> 連続 移動可能 距離 id = text = "なるべく長距離を移 動可能であること" <<requirement>> 低 消費電力 化 id = text = "消費電力をなるべ く下げること" <<requirement>> 環境地図 自動生成 id = text = "周辺環境の地図を自 動的に生成できること" <<requirement>> ユーザビリ ティの向上 id = text = "使用時のユーザの負 担をなるべく軽減すること" <<requirement>> 地図精度の 向上 id = text = "なるべく高精度な地 図を生成できること" <<requirement>> パター ン移動 id = text = "指定されたパターン に従って移動できること" <<requirement>> 効率的な 自律移動 id = text = "ユーザが指定した目的地ま で,なるべく短時間で安全に移動で きるとともに,ユーザの手間をなるべく 軽減しつつ,長距離を移動可能であ ること" <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>>
4.
2022.8.22 4 要求図 目的
開発対象システムの説明 どのような機能,特徴を持ったシステムを構築するのか? 開発時の進捗管理 どこまで実現できているのか?を確認 開発時の代替案の検討 作成手順 「何を」実現するシステムなのか?を検討 それぞれの要求を実現するためには,「何を」行わないといけないのか?を検討 ※要求図では,具体的な実現手段は記述しないため,「どのように」実現するかの詳細は 初期段階では気にしない
5.
2022.8.22 5 内部ブロック図 システム構成要素間の接続関係を明確にする
構成要素間でやりとりする内容を明確にする システムを構成する要素間でやり取りする内容を表現 ib d [Pack ag e] 移動ロボッ ト [移動ロボッ トシス テ ム(SW)] : ~レンジデータ : ~深度画像 : 周 辺環境 計測 : ~レンジデータ : ~深度画像 : ~レンジデータ : 測 域センサ制御 [0..1] : ~レンジデータ : ~深度画像 : 距離 画像 センサ制 御[0..1] : ~深度画像 : レンジデータ : 深度画像 目標位置: 位置 移動指令: ~速度 : 障害 物回避 : レンジデータ : 深度画像 目標位置: 位置 移動指令: ~速度 : レンジデータ : 深度画像 現在位置: 位置 移動指令: ~速度 : 地図 生成 : レンジデータ : 深度画像 現在位置: 位置 移動指令: ~速度 : レンジデータ : 深度画像 現在位置: ~位置 : 移動量 : 自 己位置 推定 : レンジデータ : 深度画像 現在位置: ~位置 : 移動量 現在位置: 位置 目標位置: ~位置 : 経 路生 成 現在位置: 位置 目標位置: ~位置 移動指令: 速度 : ~移動量 : 移 動制 御 移動指令: 速度 : ~移動量 目的地を設定する
6.
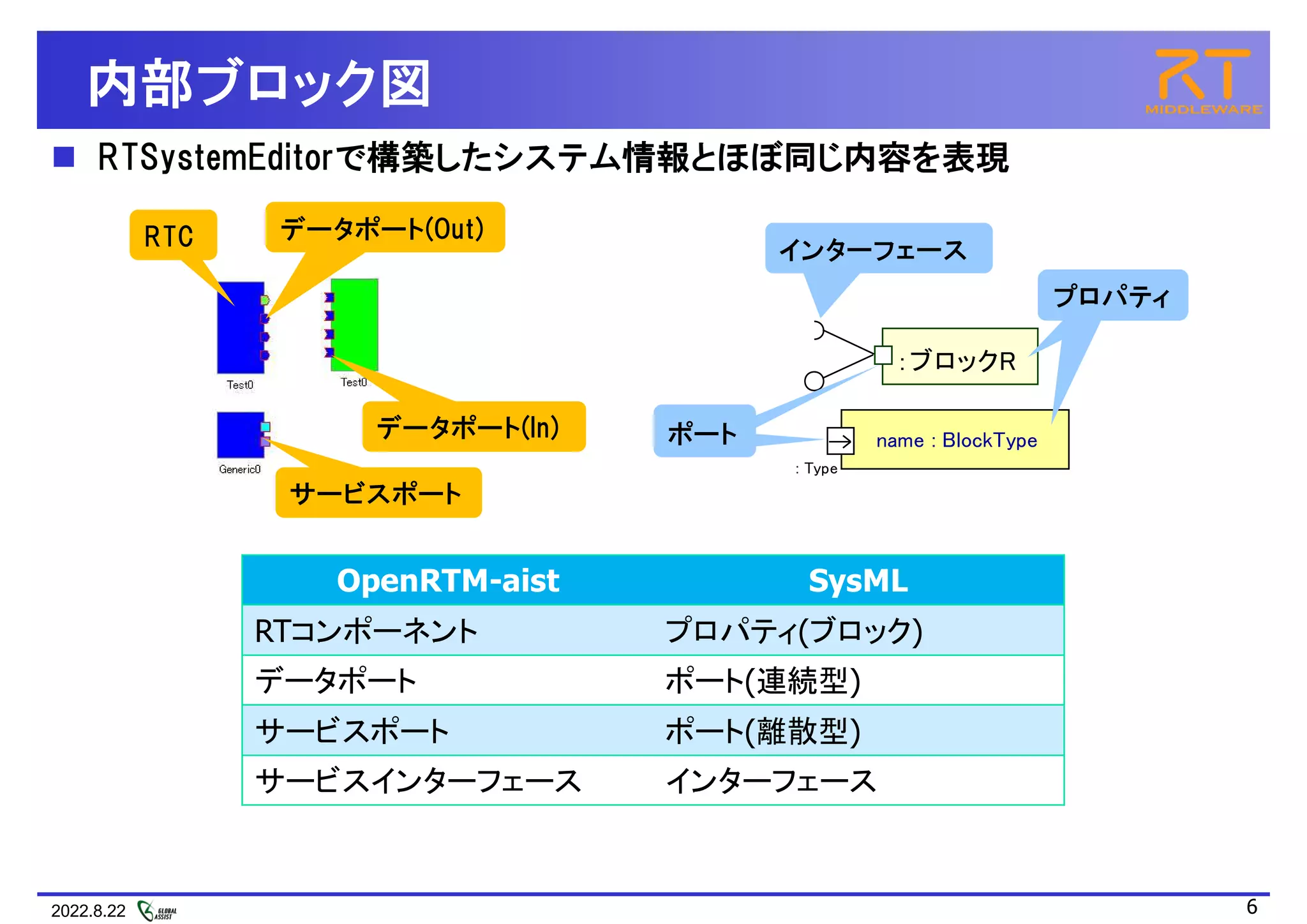
2022.8.22 6 内部ブロック図 RTSystemEditorで構築したシステム情報とほぼ同じ内容を表現 RTC
データポート(Out) データポート(In) サービスポート :ブロックR name : BlockType : Type プロパティ ポート ポート インターフェース プロパティ OpenRTM-aist SysML RTコンポーネント プロパティ(ブロック) データポート ポート(連続型) サービスポート ポート(離散型) サービスインターフェース インターフェース
7.
2022.8.22 7 内部ブロック図 作成手順
使用するハードウェアの検討 どの機材を利用するのか?不足している機材は何なのか? 必要な機能の検討 どのようなRTCで構成するか? RTCを新規開発するのか?既存のRTCを再利用するのか? RTC間のインタラクションの検討 RTC間でやり取りするデータ,コマンドの検討 各データ型,インターフェースの明確化 検討事項 必須機能の判断 最低限どの機能が必要なのか? 優先順位の決定 どのRTCから開発を行うのか? 開発工数の見積もり 各機能を開発するのに必要な工数はどの程度か? 作業分担の検討 誰がどのRTCを開発するのか?
8.
2022.8.22 8 設計時の注意点 使用する用語の意味を統一 同じ概念を表現する用語は1つに統一する 1つの用語で表現する概念は1つに統一する 一般的な用語ほど,誤解を発生しやすい
代替案の検討 必須機能とオプション機能の検討 初期段階では,どうしても多機能,複雑なシステム構成としがちなため 各RTCの粒度(機能)をあまり大きくしすぎない 再利用RTCの検討 開発工数を下げるため,既存のRTCで使えるものがないか検討 再利用可能かどうかを検証するのにも時間が掛かってしまう場合がある 使用する環境,インターフェース(データ型,操作の詳細)が合致している か確認
9.
2022.8.22 9 設計時の注意点 作業工数の見積もり
担当者を決める前に,全員で各RTC,各機能の開発時間の見積もりを行う 今回は期間が1週間と短いため,時間単位での見積もりを行う 全員で各RTC,各機能について,作業時間の見積もりを行う (以下は見積もり方法の参考) 最初は必須機能のみを対象にして見積もりを行う 1,2,5,10の数字のみ用いて,各人が考える作業工数を出し,単純にそれらの 数の平均値を見積もり工数とする この段階で,細かい検討を行ってもあまり意味がないので,各人の見積 もりは大ざっぱな数値を使用 この際,なるべく見積もり工数がなるべく小さくなる単位まで機能を分解する 見積もり工数が大きい項目が出た場合,作業を更に細分化できないか 検討する 実際に開発にかかった時間を計測しておき,見積もり値との差異を記録する この差異を元に,何度か再見積を行う 工数の見積もりは,個人によって傾向が異なる.自分自身の傾向を把握 し,見積もりの精度を向上させることが重要
10.
2022.8.22 10 設計時の注意点 作業スケジュールの検討
各機能の担当者の決定 上記で作成した見積もり工数を参考に,期間内に作業が終わるか?を確認 サマーキャンプ期間中に開発可能な時間数: 8/22(月) 2h,23(火) 4h(+4h),24(水) 6.5h(+5h),25(木) 6.5h(+5h),26(金) 6h 計:25h (39h)/人 もしも工数的に終わらないのであれば,そもそものスケジュールに無理がある 各機能の開発順番の決定 マイルストーンの検討 複数RTCを用いた結合試験のタイミングなど 検討結果を基に,2日目15:00から,今回開発するシステムを発表し て頂きます
Download

![2022.8.22 3
要求図
性能なども含めたシステムが満たすべき項目を表現
req [model] 移動ロボッ ト [移動ロボ ット(自律 移動)]
<<requirement>>
自律移 動
id =
text = "ユーザが指定した
目的地まで,安全に移動で
きること"
<<requirement>>
障害 物回避
id =
text = "ロボット周辺の障害
物を回避できること"
<<requirement>>
経路生 成
id =
text = "目的地までの移動
経路を自動で生成できるこ
と"
<<requirement>>
移動
id =
text = "移動指令に従って
移動すること"
<<requirement>>
自己位置 推定
id =
text = "ロボット自身の現在
位置を推定できること"
<<requirement>>
環境地 図
id =
text = "周辺環境の地図を
持つこと"
<<requirement>>
環 境地図マッ チング
id =
text = "周辺環境の地図と
外界計測センサの計測結
果からマッチングを行うこと"
<<requirement>>
デッド レコニング
id =
text = "内界センサの計測
値を基に,自分の位置を推
定できること"
<<requirement>>
内 界センサ
id =
text = "ロボットの相対的な
移動量を計測できること"
<<requirement>>
周 辺環境情報 の計測
id =
text = "ロボット周辺の環境情
報を計測できること"
<<requirement>>
移動時 間
id =
text = "なるべく短い時間で
目的地まで到達できること"
<<requirement>>
連続 移動可能 距離
id =
text = "なるべく長距離を移
動可能であること"
<<requirement>>
低 消費電力 化
id =
text = "消費電力をなるべ
く下げること"
<<requirement>>
環境地図 自動生成
id =
text = "周辺環境の地図を自
動的に生成できること"
<<requirement>>
ユーザビリ ティの向上
id =
text = "使用時のユーザの負
担をなるべく軽減すること"
<<requirement>>
地図精度の 向上
id =
text = "なるべく高精度な地
図を生成できること"
<<requirement>>
パター ン移動
id =
text = "指定されたパターン
に従って移動できること"
<<requirement>>
効率的な 自律移動
id =
text = "ユーザが指定した目的地ま
で,なるべく短時間で安全に移動で
きるとともに,ユーザの手間をなるべく
軽減しつつ,長距離を移動可能であ
ること"
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>> <<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>
<<deriveReqt>>](https://image.slidesharecdn.com/sysml20220822scga-220824083846-92992c69/75/SysML-20220822SC_GA-pdf-3-2048.jpg)
![2022.8.22 5
内部ブロック図
システム構成要素間の接続関係を明確にする
構成要素間でやりとりする内容を明確にする
システムを構成する要素間でやり取りする内容を表現
ib d [Pack ag e] 移動ロボッ ト [移動ロボッ トシス テ ム(SW)]
: ~レンジデータ : ~深度画像
: 周 辺環境 計測
: ~レンジデータ : ~深度画像
: ~レンジデータ
: 測 域センサ制御 [0..1]
: ~レンジデータ : ~深度画像
: 距離 画像 センサ制 御[0..1]
: ~深度画像
: レンジデータ : 深度画像
目標位置: 位置 移動指令: ~速度
: 障害 物回避
: レンジデータ : 深度画像
目標位置: 位置 移動指令: ~速度
: レンジデータ : 深度画像
現在位置: 位置 移動指令: ~速度
: 地図 生成
: レンジデータ : 深度画像
現在位置: 位置 移動指令: ~速度
: レンジデータ : 深度画像
現在位置: ~位置
: 移動量
: 自 己位置 推定
: レンジデータ : 深度画像
現在位置: ~位置
: 移動量
現在位置: 位置
目標位置: ~位置
: 経 路生 成
現在位置: 位置
目標位置: ~位置
移動指令: 速度
: ~移動量
: 移 動制 御
移動指令: 速度
: ~移動量
目的地を設定する](https://image.slidesharecdn.com/sysml20220822scga-220824083846-92992c69/75/SysML-20220822SC_GA-pdf-5-2048.jpg)