Download to read offline
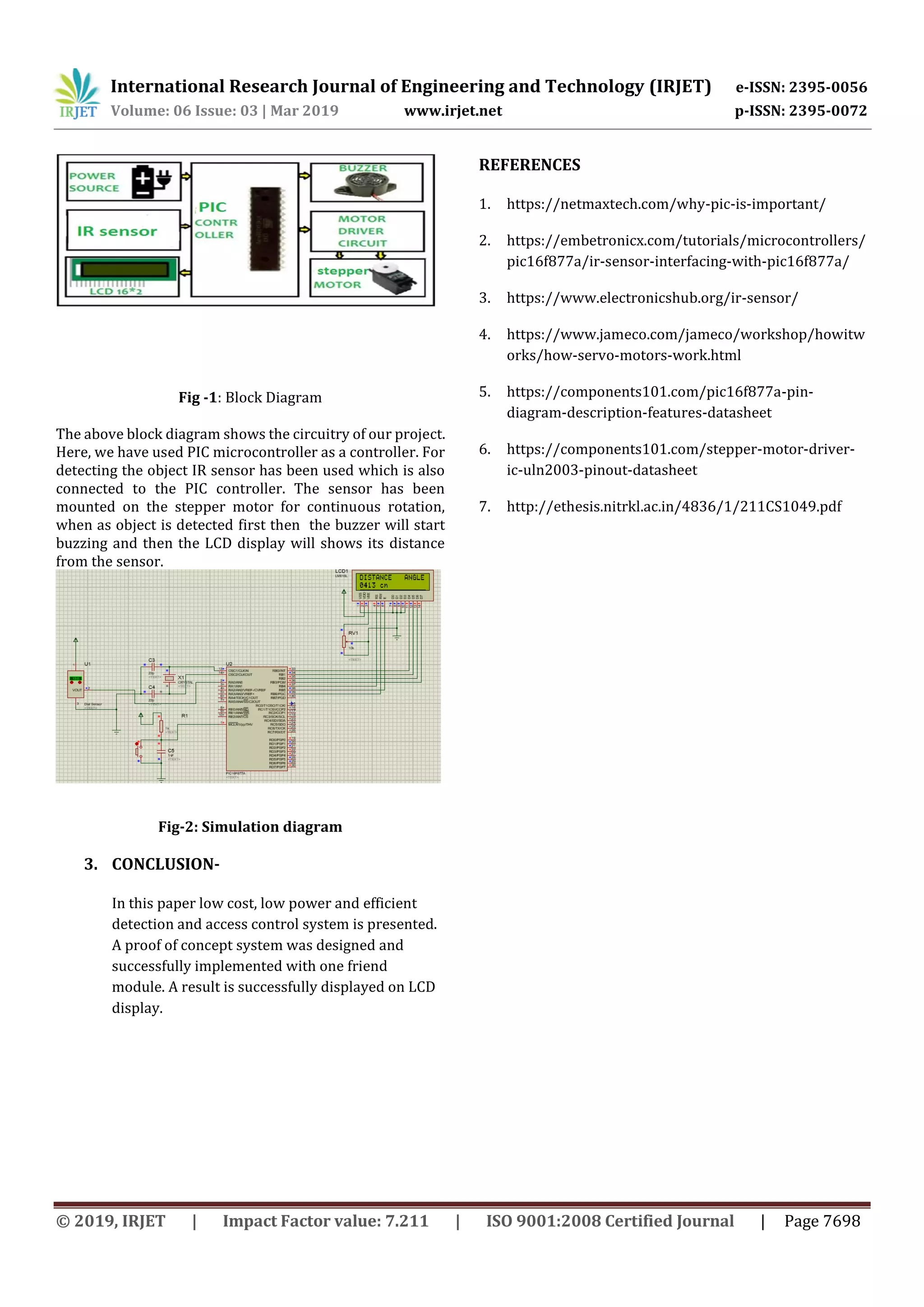

The document describes a mini IR radar system for unauthorized object detection using an IR sensor, PIC microcontroller, stepper motor, LCD display, and buzzer. The system works by transmitting an IR signal from the sensor, which is mounted on a stepper motor to rotate 360 degrees. It detects the distance and angle to any objects in its range based on the echo signal return time. When an object is detected, the buzzer activates and LCD displays the distance and angle. The system aims to monitor an area and alert authorities about unauthorized object detections.