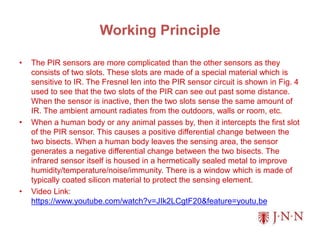
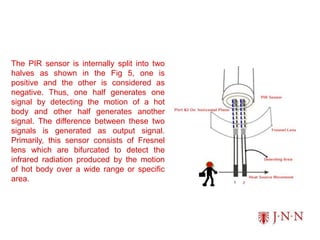
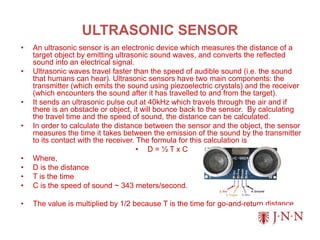
The document provides an overview of motion sensors in engineering, focusing on various types such as passive infrared, ultrasonic, and microwave sensors. It explains the principles of operation, applications, and advantages of each sensor type while detailing the construction and operation of devices such as potentiometers, resolvers, and encoders. Applications highlighted include security systems, intruder alarms, and automation in home and industrial settings.