Download as PDF, PPTX
![50
Approximation
Algorithms
Jhoirene B Clemente
3 Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Optimization Problems
[Papadimitriou and Steiglitz, 1998]
Definition (Instance of an Optimization Problem)
An instance of an optimization problem is a pair (F, c), where F
is any set, the domain of feasible points; c is the cost function, a
mapping
c : F ! R
The problem is to find an f 2 F for which
c(f ) c(y) 8 y 2 F
Such a point f is called a globally optimal solution to the given
instance, or, when no confusion can arise, simply an optimal
solution.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-3-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
3 Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Optimization Problems
[Papadimitriou and Steiglitz, 1998]
Definition (Instance of an Optimization Problem)
An instance of an optimization problem is a pair (F, c), where F
is any set, the domain of feasible points; c is the cost function, a
mapping
c : F ! R
The problem is to find an f 2 F for which
c(f ) c(y) 8 y 2 F
Such a point f is called a globally optimal solution to the given
instance, or, when no confusion can arise, simply an optimal
solution.
Definition (Optimization Problem)
An optimization problem is a set of instances of an optimization
problem.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-4-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
4 Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Optimization Problems
[Papadimitriou and Steiglitz, 1998]
Two categories
1. with continuous variables, where we look for a set of real
numbers or a function
2. with discrete variables, which we call combinatorial, where
we look for an object from a finite, or possibly countably
infinite set, typically an integer, set, permutation, or graph.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-5-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
5 Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Combinatorial Optimization Problem
Definition (Combinatorial Optimization Problem
[Papadimitriou and Steiglitz, 1998])
An optimization problem = (D,R, cost, goal) consists of
1. A set of valid instances D. Let I 2 D, denote an input
instance.
2. Each I 2 D has a set of feasible solutions, R(I ).
3. Objective function, cost, that assigns a nonnegative
rational number to each pair (I , SOL), where I is an instance
and SOL is a feasible solution to I.
4. Either minimization or maximization problem:
goal 2 {min, max}.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-6-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
7 Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
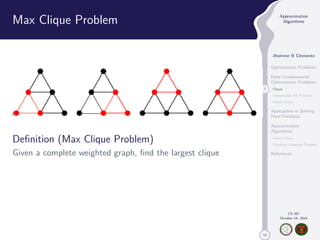
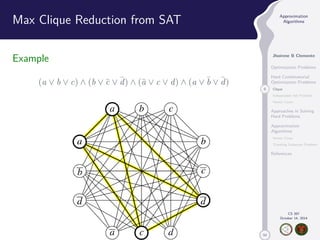
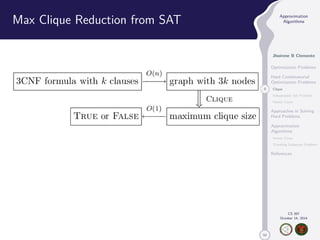
Max Clique Problem
Definition (Max Clique Problem)
Given a complete weighted graph, find the largest clique
Theorem
Max Clique is NP-hard [Garey and Johnson, 1979].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-9-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
7 Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Max Clique Problem
Definition (Max Clique Problem)
Given a complete weighted graph, find the largest clique
Theorem
Max Clique is NP-hard [Garey and Johnson, 1979].
Proposition
The decision variant of MAX-SAT is NP-Complete
[Garey and Johnson, 1979].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-10-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
10 Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
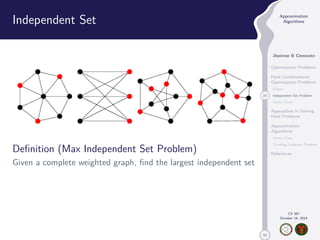
Independent Set
Definition (Max Independent Set Problem)
Given a complete weighted graph, find the largest independent set
Theorem
Independent Set Problem is NP-hard [Garey and Johnson, 1979].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-14-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
11 Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
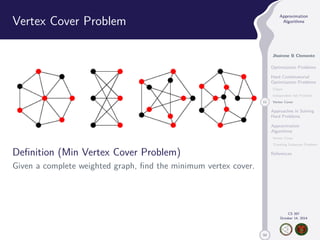
Vertex Cover Problem
Definition (Min Vertex Cover Problem)
Given a complete weighted graph, find the minimum vertex cover.
Theorem
Vertex Cover Problem is NP-hard [Garey and Johnson, 1979].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-16-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
15 Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximation Algorithms
Definition (Approximation Algorithm
[Williamson and Shmoy, 2010] )
An -approximation algorithm for an optimization problem is a
polynomial-time algorithm that for all instances of the problem
produces a solution whose value is within a factor of of the
value of an optimal solution.
Given an problem instance I with an optimal solution Opt(I ), i.e.
the cost function cost(Opt(I )) is minimum/maximum.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-21-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
15 Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximation Algorithms
Definition (Approximation Algorithm
[Williamson and Shmoy, 2010] )
An -approximation algorithm for an optimization problem is a
polynomial-time algorithm that for all instances of the problem
produces a solution whose value is within a factor of of the
value of an optimal solution.
Given an problem instance I with an optimal solution Opt(I ), i.e.
the cost function cost(Opt(I )) is minimum/maximum.
I An algorithm for a minimization problem is called
-approximative algorithm for some 1, if the algorithm
obtains a maximum cost of · cost(Opt(I )), for any input
instance I .](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-22-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
15 Approximation
Algorithms
Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximation Algorithms
Definition (Approximation Algorithm
[Williamson and Shmoy, 2010] )
An -approximation algorithm for an optimization problem is a
polynomial-time algorithm that for all instances of the problem
produces a solution whose value is within a factor of of the
value of an optimal solution.
Given an problem instance I with an optimal solution Opt(I ), i.e.
the cost function cost(Opt(I )) is minimum/maximum.
I An algorithm for a minimization problem is called
-approximative algorithm for some 1, if the algorithm
obtains a maximum cost of · cost(Opt(I )), for any input
instance I .
I An algorithm for a maximization problem is called
-approximative algorithm, for some 1, if the algorithm
obtains a minimum cost of · cost(Opt(I )), for any input
instance I .](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-23-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
18 Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
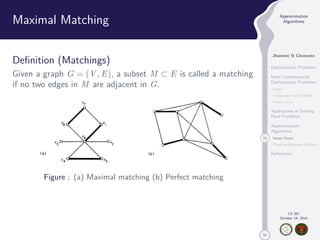
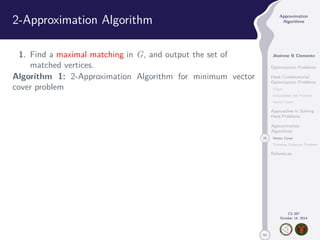
Example: Vertex Cover Problem
Definition (Vertex Cover [Vazirani, 2001] )
Given a graph G = (V,E), a vertex cover is a subset C V
such that every edge has at least one end point incident at C.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-26-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
18 Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
Example: Vertex Cover Problem
Definition (Vertex Cover [Vazirani, 2001] )
Given a graph G = (V,E), a vertex cover is a subset C V
such that every edge has at least one end point incident at C.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-27-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
18 Vertex Cover
Traveling Salesman Problem
References
CS 397
October 14, 2014
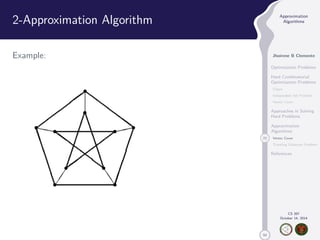
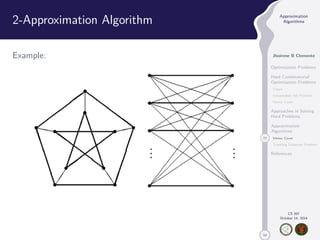
Example: Vertex Cover Problem
Definition (Vertex Cover [Vazirani, 2001] )
Given a graph G = (V,E), a vertex cover is a subset C V
such that every edge has at least one end point incident at C.
Definition (Minimum Vertex Cover Problem)
Given a complete weighted graph G = (V,E), find a minimum
cardinality vertex cover C.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-28-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
45 Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximable Problems [Vazirani, 2001]
Definition (APX)
I An abbreviation for “Approximable, is the set of NP
optimization problems that allow polynomial-time
approximation algorithms with approximation ratio bounded
by a constant.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-58-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
45 Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximable Problems [Vazirani, 2001]
Definition (APX)
I An abbreviation for “Approximable, is the set of NP
optimization problems that allow polynomial-time
approximation algorithms with approximation ratio bounded
by a constant.
I Problems in this class have efficient algorithms that can find
an answer within some fixed percentage of the optimal
answer.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-59-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
46 Traveling Salesman Problem
References
CS 397
October 14, 2014
Polynomial-time Approximation Schemes
Definition (PTAS [Aaronson et al., 2008])
The subclass of NPO problems that admit an approximation
scheme in the following sense.
For any 0, there is a polynomial-time algorithm that is
guaranteed to find a solution whose cost is within a 1 + factor
of the optimum cost. Contains FPTAS, and is contained in APX.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-60-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
46 Traveling Salesman Problem
References
CS 397
October 14, 2014
Polynomial-time Approximation Schemes
Definition (PTAS [Aaronson et al., 2008])
The subclass of NPO problems that admit an approximation
scheme in the following sense.
For any 0, there is a polynomial-time algorithm that is
guaranteed to find a solution whose cost is within a 1 + factor
of the optimum cost. Contains FPTAS, and is contained in APX.
Definition (FPTAS [Aaronson et al., 2008] )
The subclass of NPO problems that admit an approximation
scheme in the following sense.
For any 0, there is an algorithm that is guaranteed to find a
solution whose cost is within a 1 + factor of the optimum cost.
Furthermore, the running time of the algorithm is polynomial in n
(the size of the problem) and in 1/.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-61-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
47 Traveling Salesman Problem
References
CS 397
October 14, 2014
Approximation Ratio of well known Hard
Problems
1. FPTAS: Bin Packing Problem
2. PTAS: Makespan Scheduling Problem
3. APX:
3.1 Min Steiner Tree Problem (1.55 Approximable) [Robins,2005]
3.2 Min Metric TSP (3/2 Approximable) [Christofides,1977]
3.3 Max SAT (0.77 Approximable) [Asano,1997]
3.4 Vertex Cover (2 Approximable) [Vazirani,2001]
4. MAX SNP
4.1 Independent Set Problem
4.2 Clique Problem
4.3 Travelling Salesman Problem](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-62-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
48 Traveling Salesman Problem
References
CS 397
October 14, 2014
Complexity Classes [Ausiello et al., 2011]
FPTAS ( PTAS ( APX ( NPO](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-63-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
49 Traveling Salesman Problem
References
CS 397
October 14, 2014
Inapproximable Problems
Many problems have polynomial-time approximation schemes.
However, there exists a class of problems that is not so easy
[Williamson and Shmoy, 2010]. This class is called MAX SNP.
Theorem
For any MAXSNP-hard problem, there does not exist a
polynomial-time approximation scheme, unless P = NP
[Williamson and Shmoy, 2010].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-64-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
49 Traveling Salesman Problem
References
CS 397
October 14, 2014
Inapproximable Problems
Many problems have polynomial-time approximation schemes.
However, there exists a class of problems that is not so easy
[Williamson and Shmoy, 2010]. This class is called MAX SNP.
Theorem
For any MAXSNP-hard problem, there does not exist a
polynomial-time approximation scheme, unless P = NP
[Williamson and Shmoy, 2010].](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-65-320.jpg)
![50
Approximation
Algorithms
Jhoirene B Clemente
Optimization Problems
Hard Combinatorial
Optimization Problems
Clique
Independent Set Problem
Vertex Cover
Approaches in Solving
Hard Problems
Approximation
Algorithms
Vertex Cover
49 Traveling Salesman Problem
References
CS 397
October 14, 2014
Inapproximable Problems
Many problems have polynomial-time approximation schemes.
However, there exists a class of problems that is not so easy
[Williamson and Shmoy, 2010]. This class is called MAX SNP.
Theorem
For any MAXSNP-hard problem, there does not exist a
polynomial-time approximation scheme, unless P = NP
[Williamson and Shmoy, 2010].
Theorem
If P6= NP, then for any constant 1, there is no
polynomial-time approximation algorithm with approximation
ratio for the general travelling salesman problem.](https://image.slidesharecdn.com/approx-141023022738-conversion-gate01/85/Introduction-to-Approximation-Algorithms-66-320.jpg)

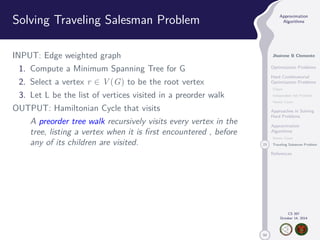
The document discusses approximation algorithms for solving hard combinatorial optimization problems. It defines optimization problems and covers NP-hard problems like the clique, independent set, vertex cover, and traveling salesman problems. Approaches for solving NP-hard problems include exact algorithms, approximation algorithms that provide guaranteed good solutions, and heuristics without guarantees. Approximation algorithms aim to settle for good enough solutions rather than optimal ones.