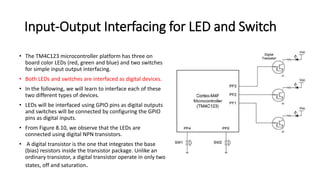
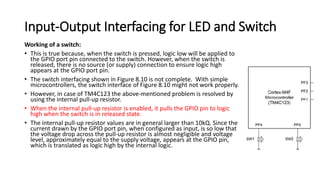
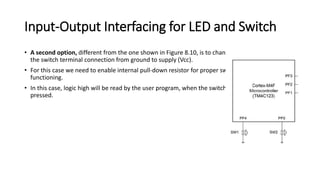
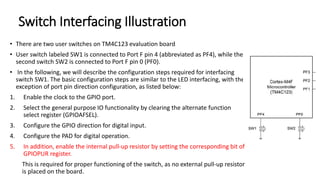
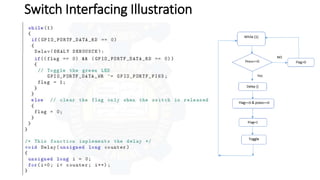
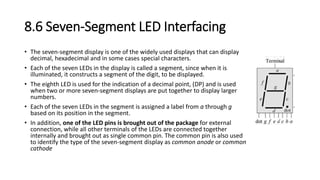
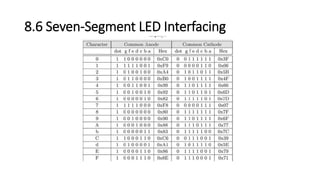
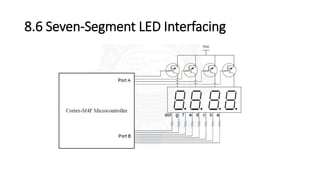
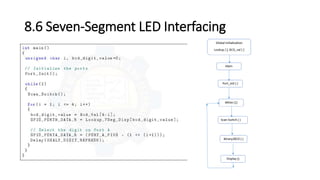
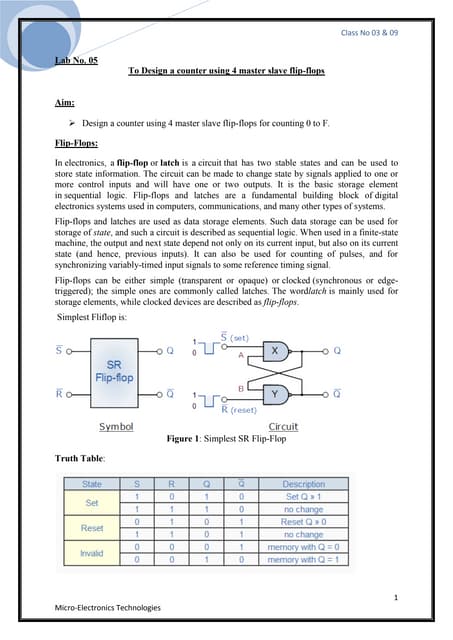
The document provides an overview of interfacing color LEDs and switches with the TM4C123 microcontroller, detailing the digital input and output configurations necessary for operation. It discusses switch bouncing, methods for handling it, and various programming approaches for LED toggling and switch input, including polling and interrupt techniques. Additionally, it covers the interfacing of seven-segment displays using multiplexing to optimize GPIO pin usage and explains the differences between common cathode and common anode display types.