Download to read offline

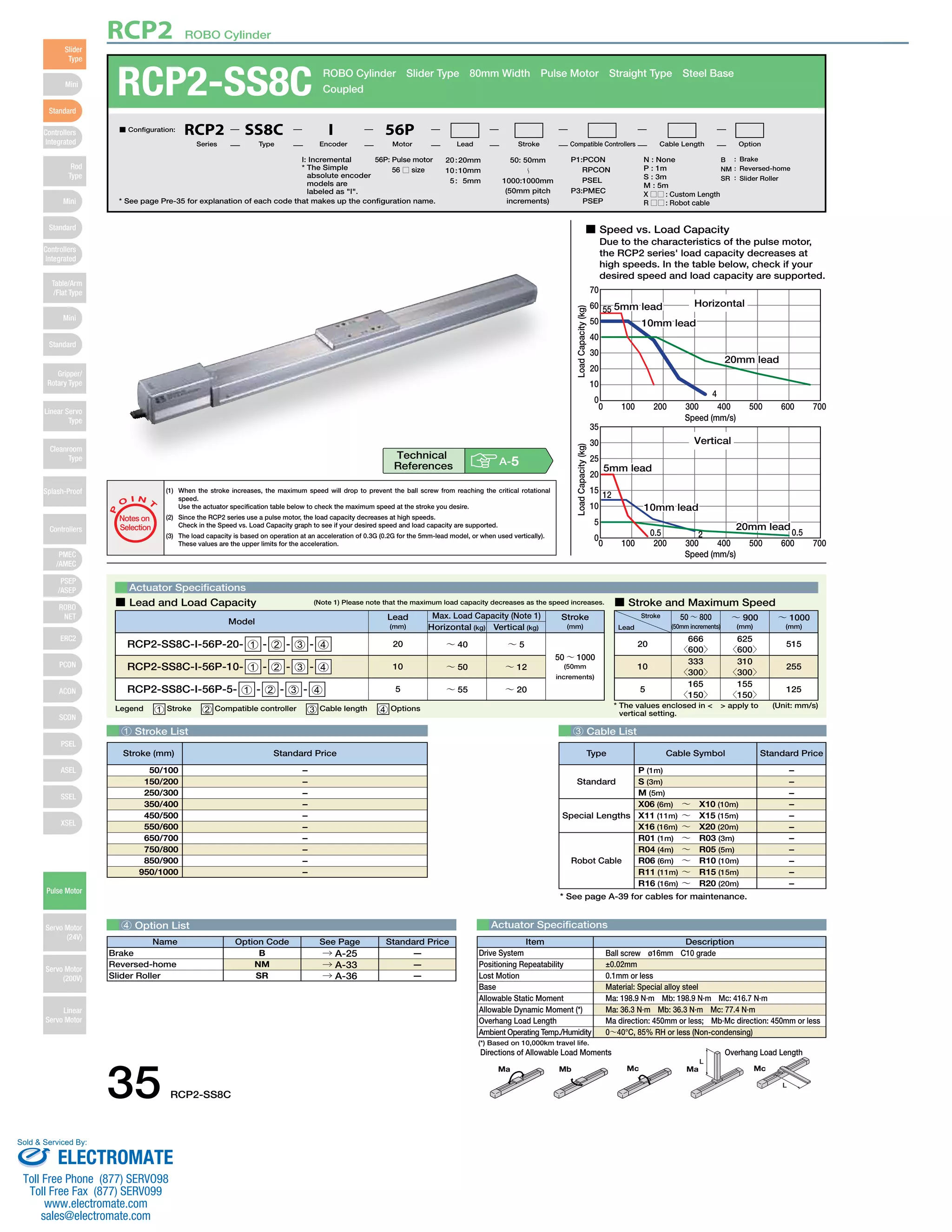
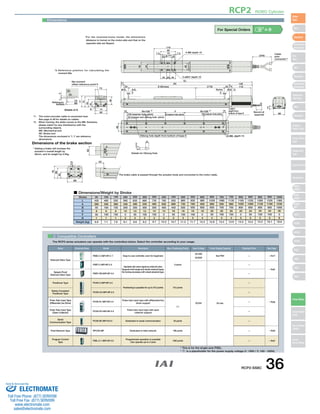

The document provides specifications for the RCP2 ROBO Cylinder. It includes: 1) Details on how load capacity decreases at higher speeds for the pulse motor. 2) Dimensions, weight, and other technical specifications for the cylinder based on stroke length. 3) A list of compatible mini standard controllers that can operate the cylinder.























































































