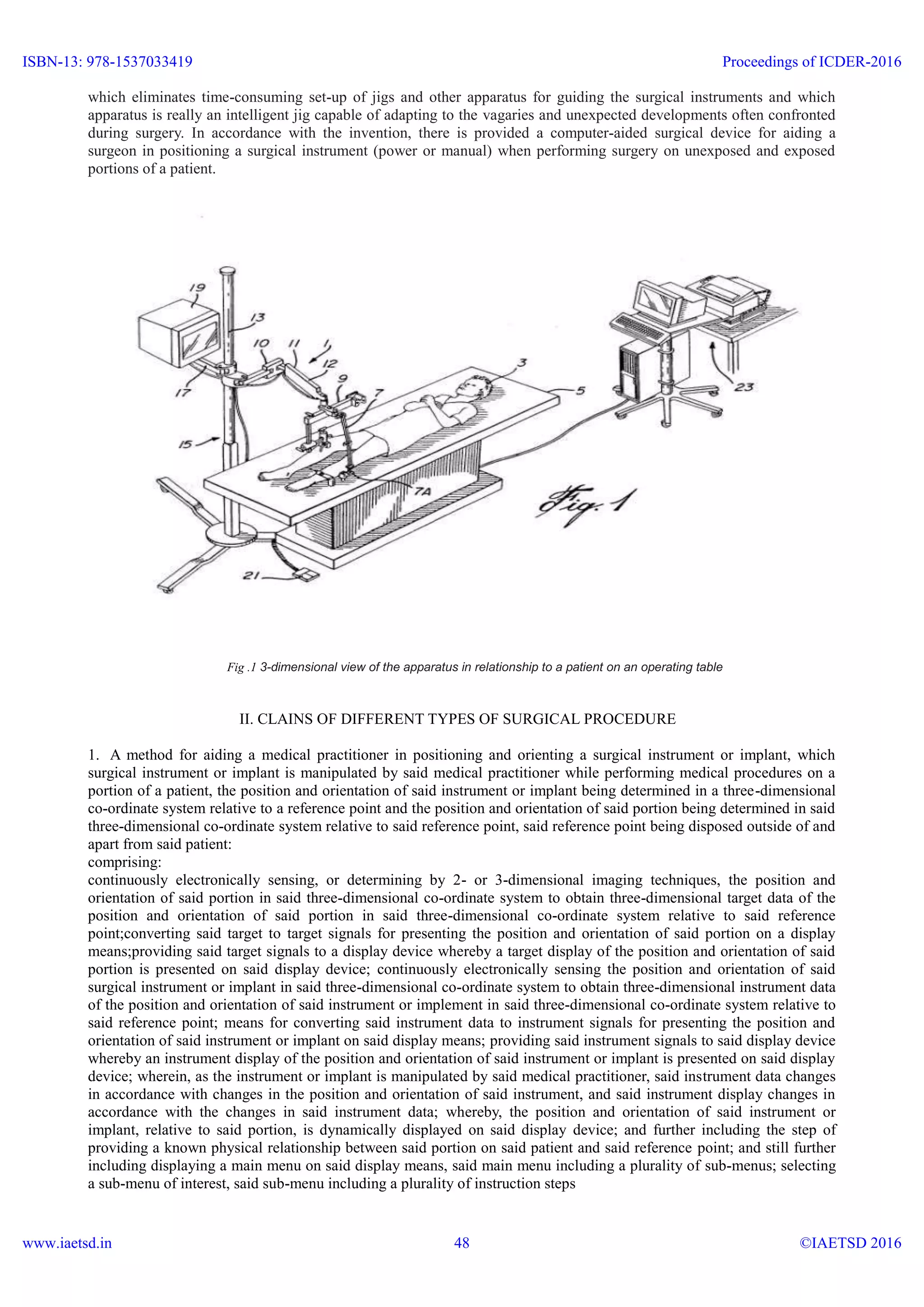
1) The document describes a proposed invention for a computer automated surgeon apparatus that would aid surgeons in accurately positioning surgical instruments through linkages, continuous sensing of instrument positions, and 3D displays.
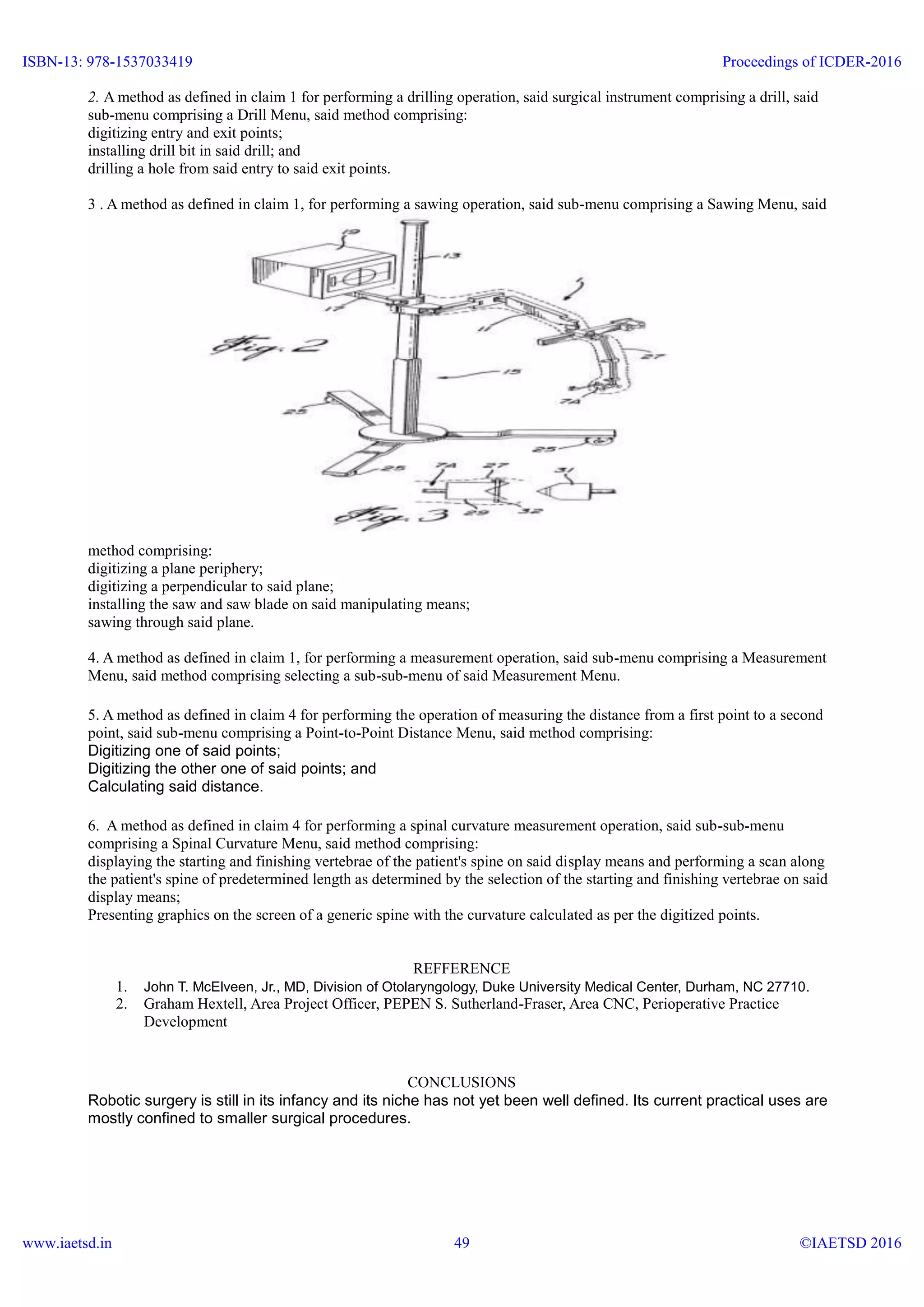
2) The apparatus would include a computer-driven precision instrumented linkage attached to surgical instruments to provide continuous feedback on the 3D orientation of the tool to the surgeon.
3) The invention aims to eliminate time-consuming setups for surgical tools and adapt intelligently to unexpected developments during surgery.


































![COMPUTER ASSISTED ORTHOPAEDICS SURGERY [Autosaved] (1).pptx](https://cdn.slidesharecdn.com/ss_thumbnails/computerassistedorthopaedicssurgeryautosaved1-250211145313-9f76e6d8-thumbnail.jpg?width=640&height=640&fit=bounds)