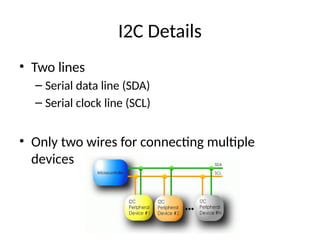
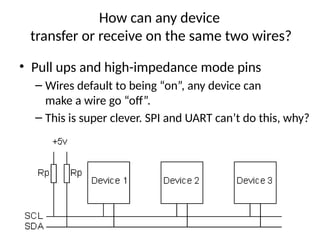
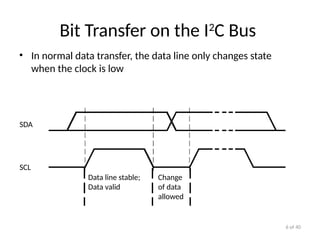
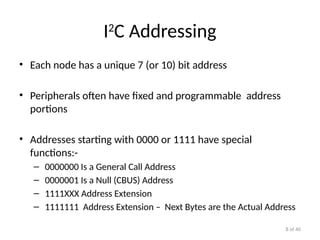
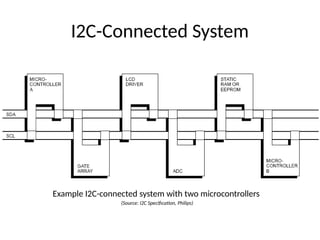
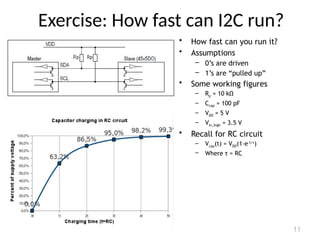
The document discusses the I2C bus, a communication protocol used to connect multiple peripherals to a microcontroller, highlighting its advantages and disadvantages. Details about device addressing, master-slave relationships, and data transfer mechanisms are explained, alongside practical exercises to understand I2C's operational speed and efficiency. It also describes the configuration and operation of an accelerometer using this protocol.