Downloaded 83 times

![• Motion Perception
– Gunnar Johansson [1971]
• Sequence of images for
Human Motion Analysis
• ‘Moving Light Displays’
enable identification of
people and gender
• Motion Capture [2014]
– Dawn of the Planet of
the Apes
Motivation](https://image.slidesharecdn.com/thesisrepresentation-140724033822-phpapp01/75/Human-Action-Recognition-Using-3D-Joint-Information-and-HOOFD-Features-4-2048.jpg)

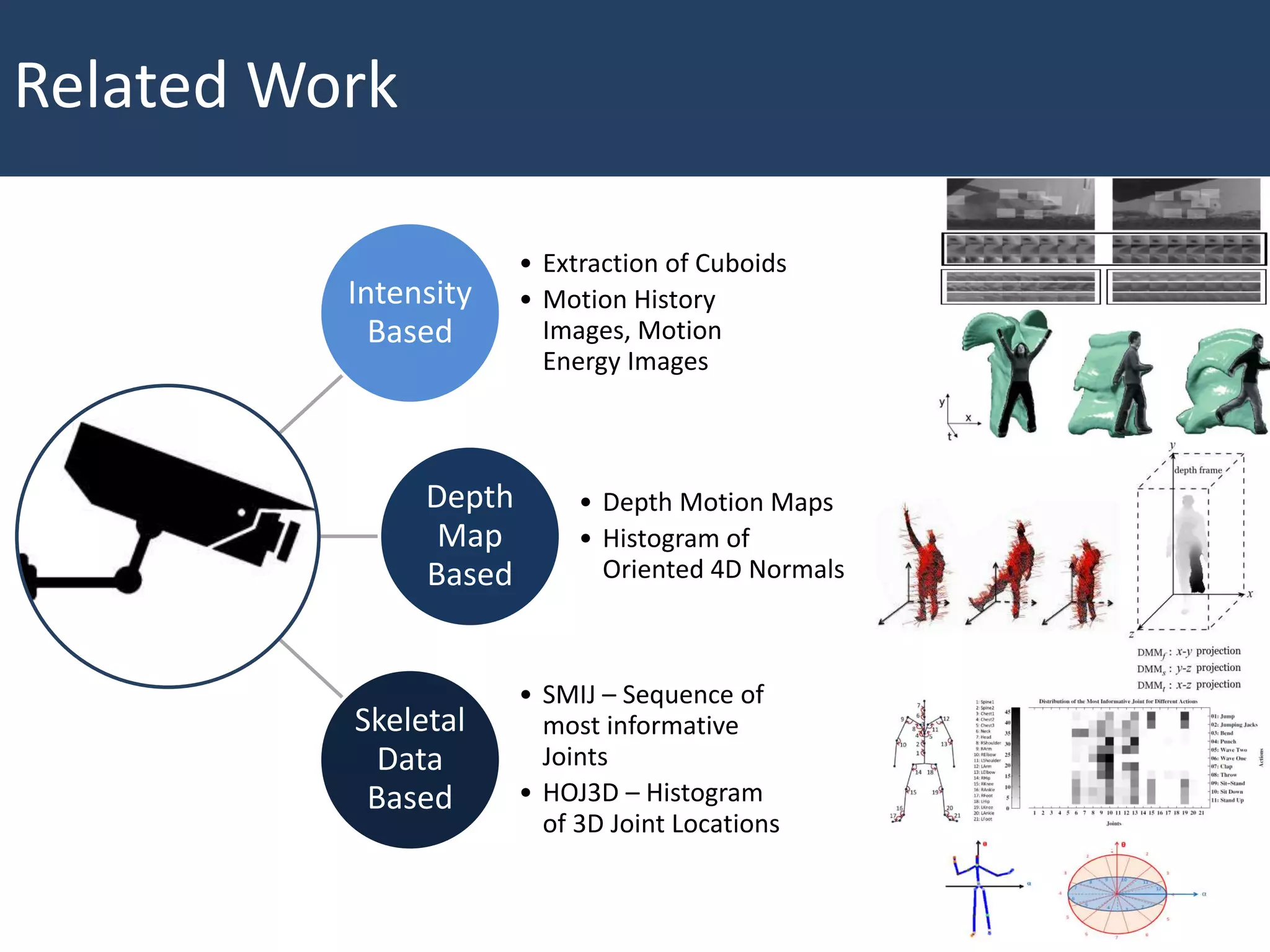
![Related Work
• Extraction of Cuboids,
Dollar et al. [CVPR, 2005]
• Motion History Images
Motion Energy Images,
Gorelick et al. [PAMI, 2007]
Intensity
Based](https://image.slidesharecdn.com/thesisrepresentation-140724033822-phpapp01/75/Human-Action-Recognition-Using-3D-Joint-Information-and-HOOFD-Features-12-2048.jpg)
![Related Work
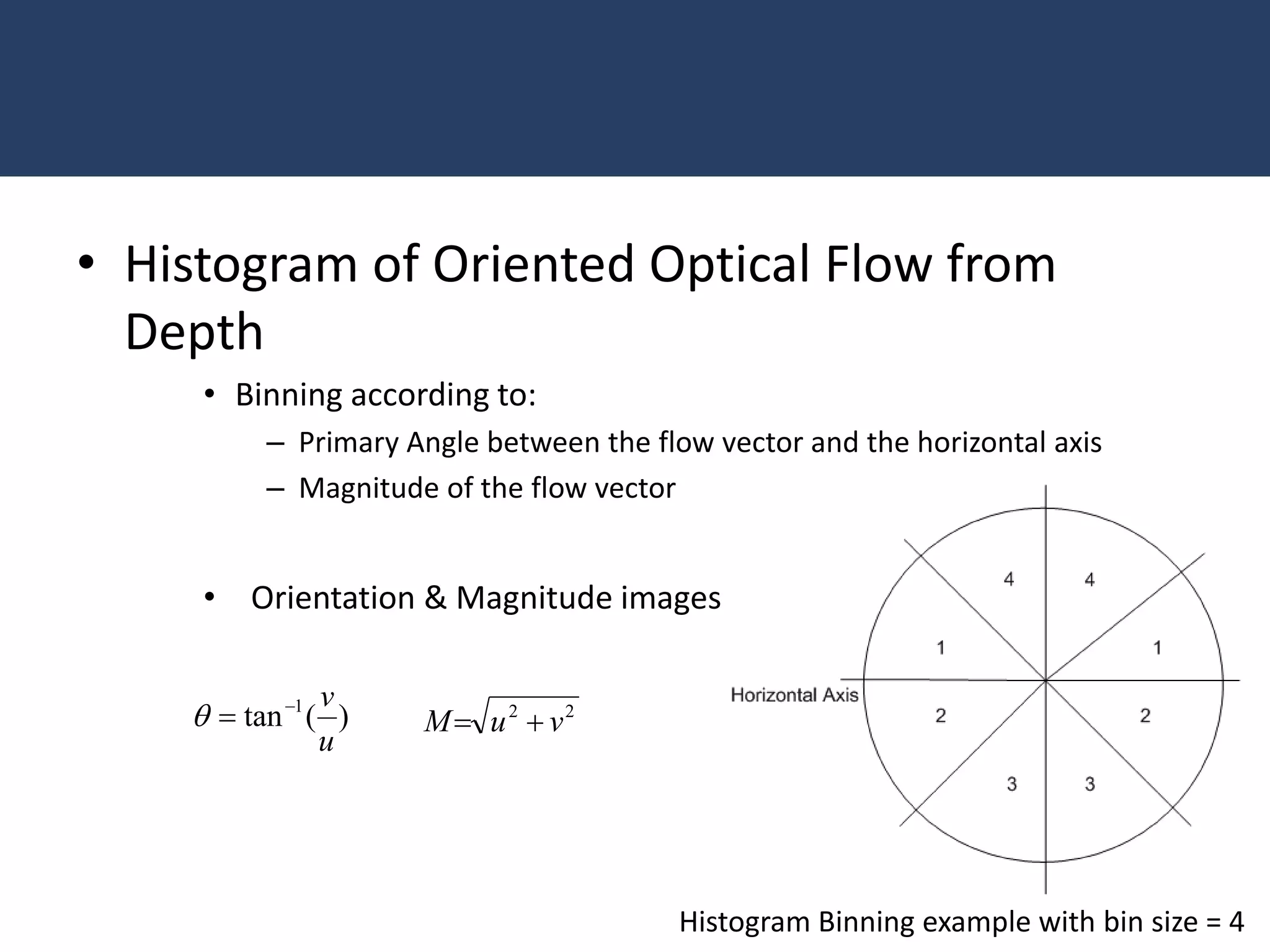
• Histogram of Oriented
4D Normals (HON4D)
Oreifej et al. [CVPR, 2013]
• Depth Motion Maps,
Yang et al. [JRTIP, 2012]
Depth Map
Based](https://image.slidesharecdn.com/thesisrepresentation-140724033822-phpapp01/75/Human-Action-Recognition-Using-3D-Joint-Information-and-HOOFD-Features-13-2048.jpg)
![Related Work
• Sequence of Most Informative Joints (SMIJ),
Ofli et al. [CVIU, 2013]
• View Invariant Human
Action Recognition
Using Histogram of
3D Joints,
Xia et al. [CVPR, 2012]
Skeletal Data
Based](https://image.slidesharecdn.com/thesisrepresentation-140724033822-phpapp01/75/Human-Action-Recognition-Using-3D-Joint-Information-and-HOOFD-Features-14-2048.jpg)
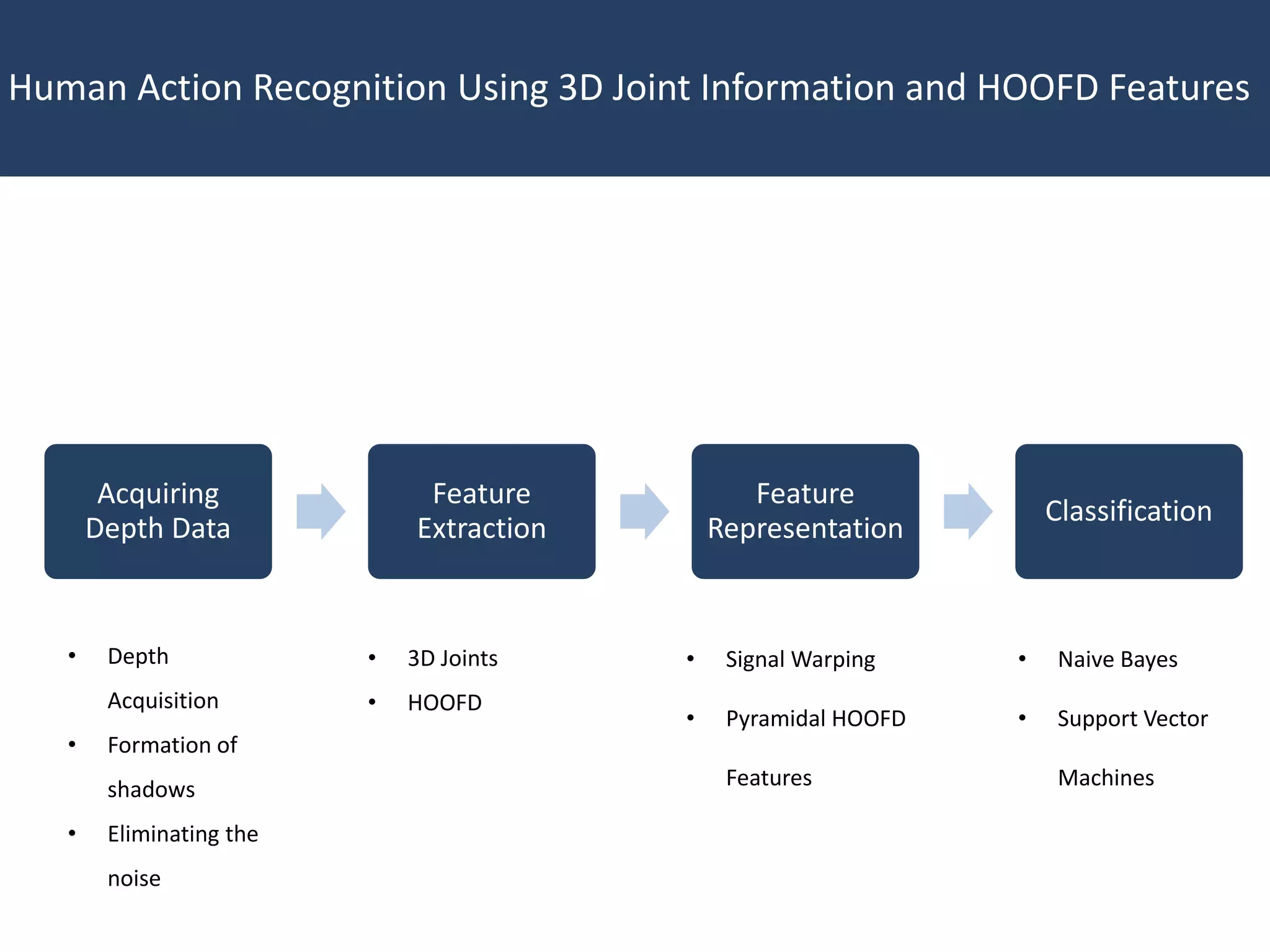
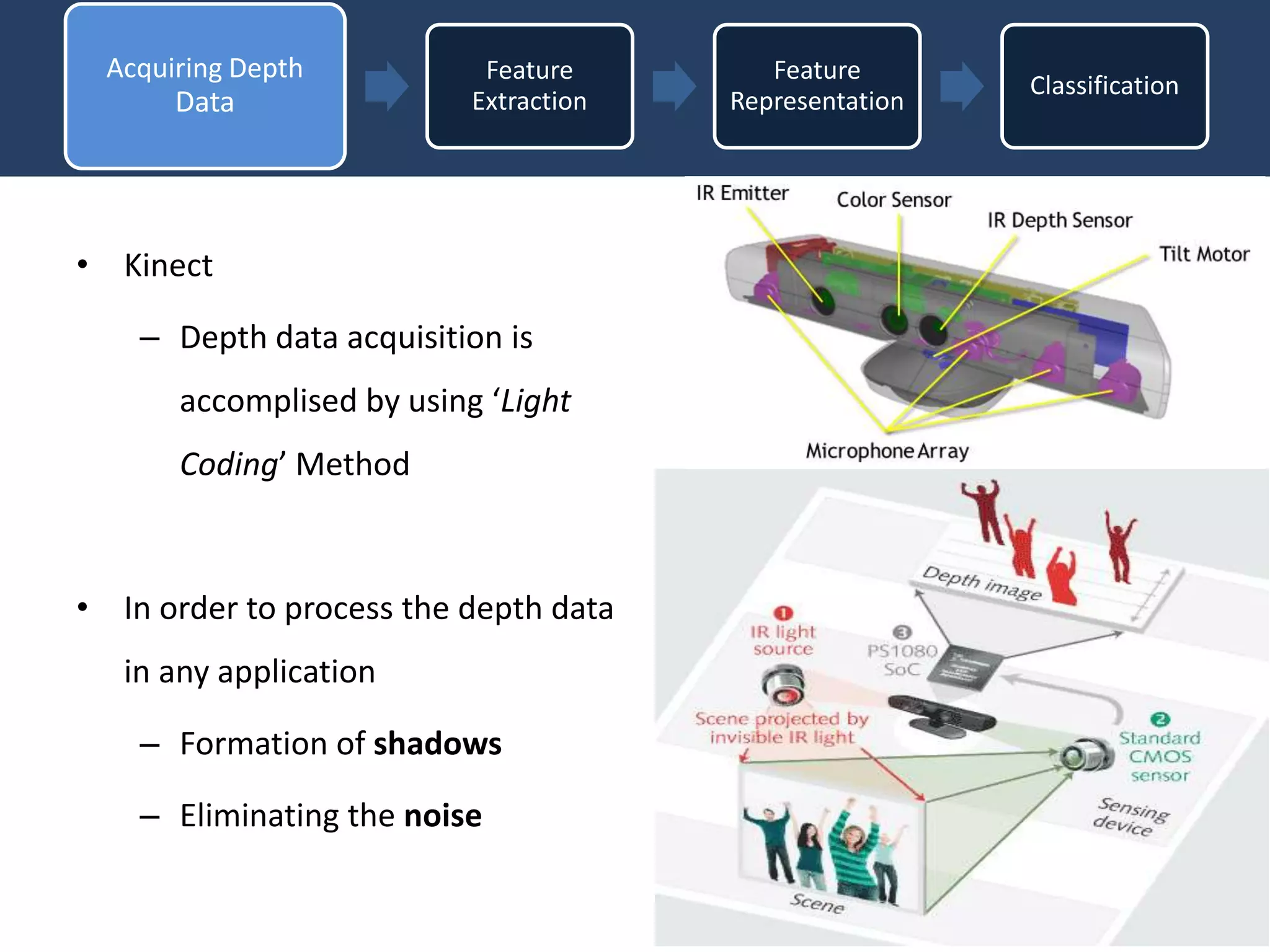
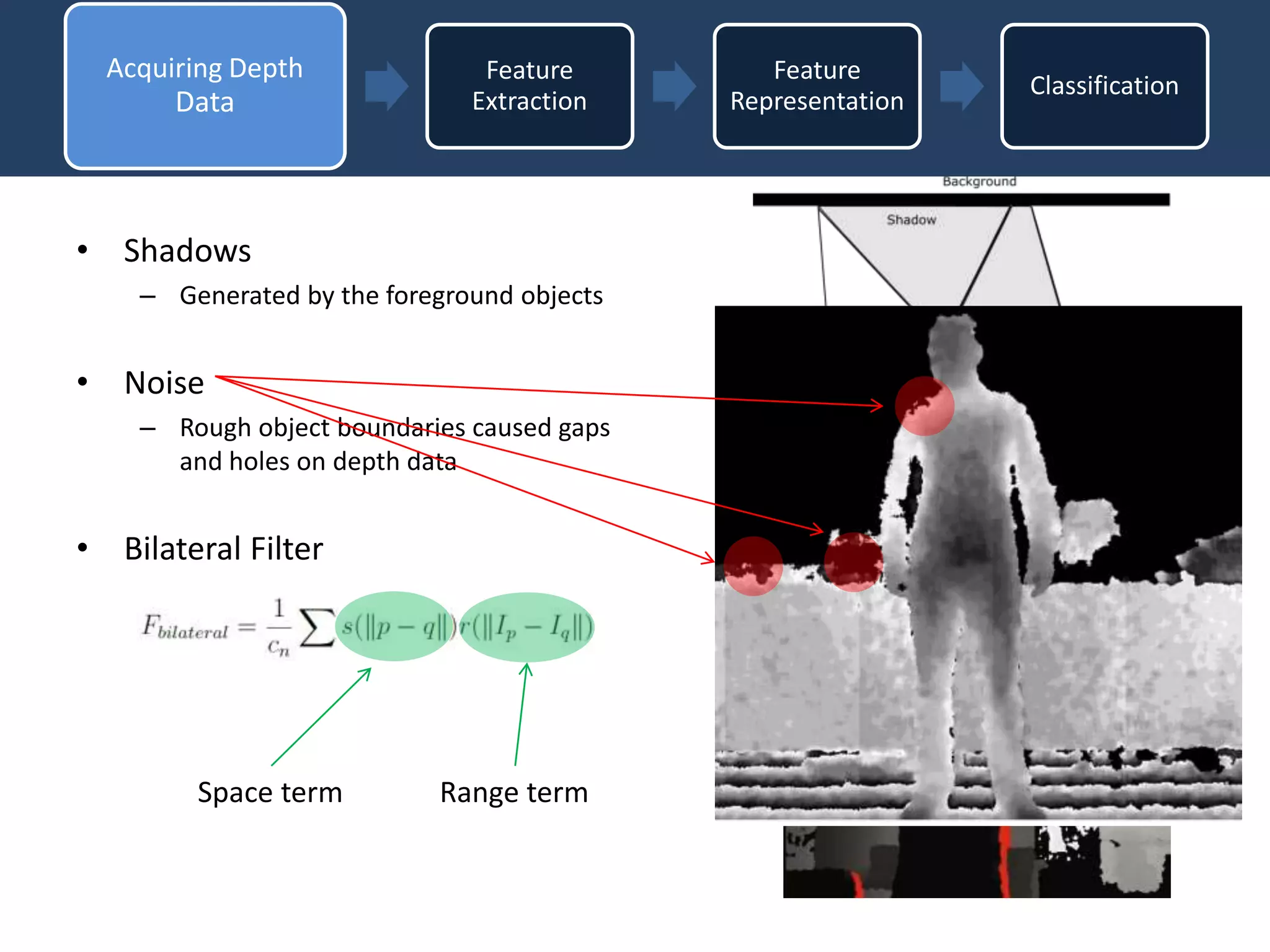
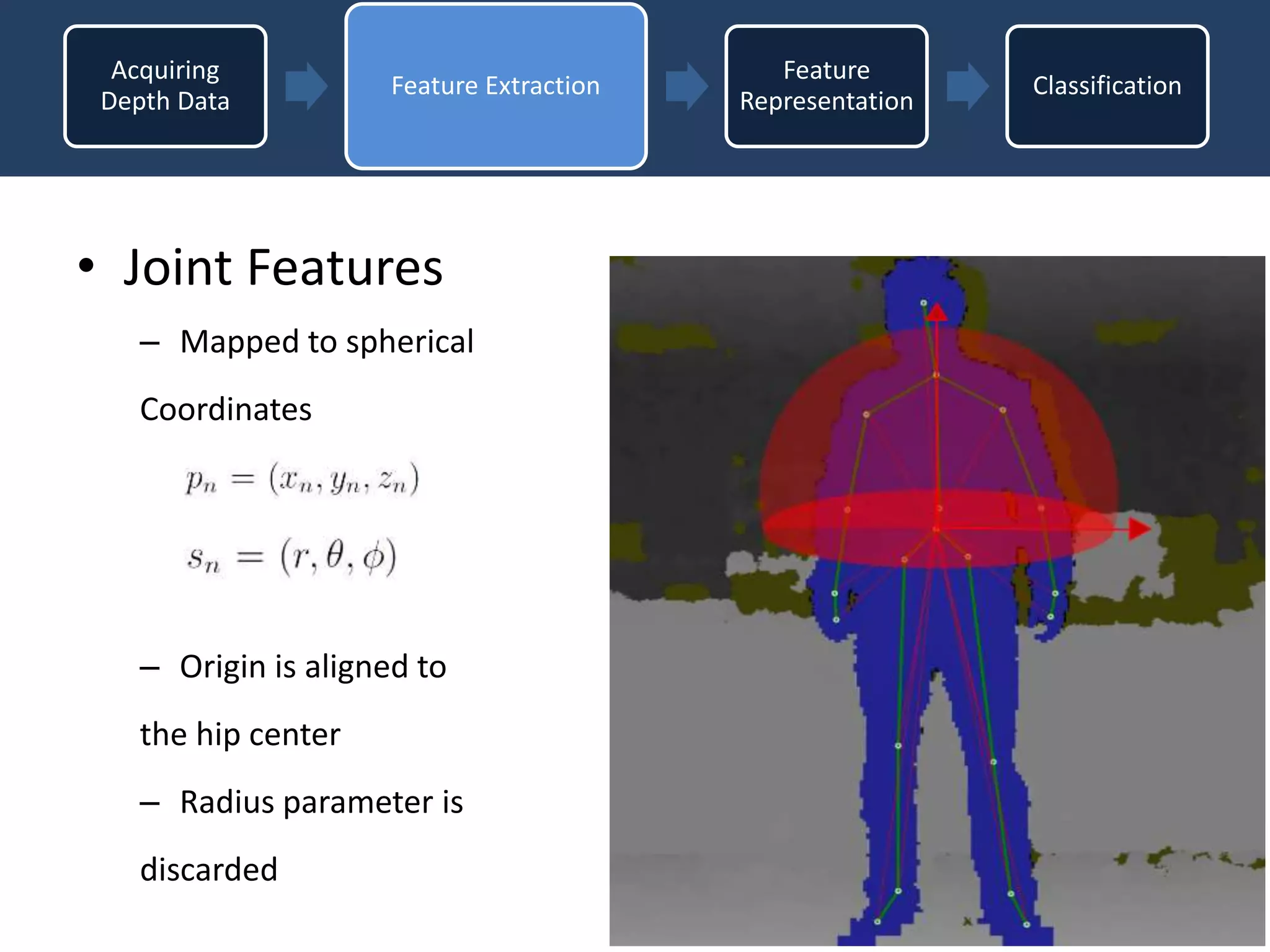
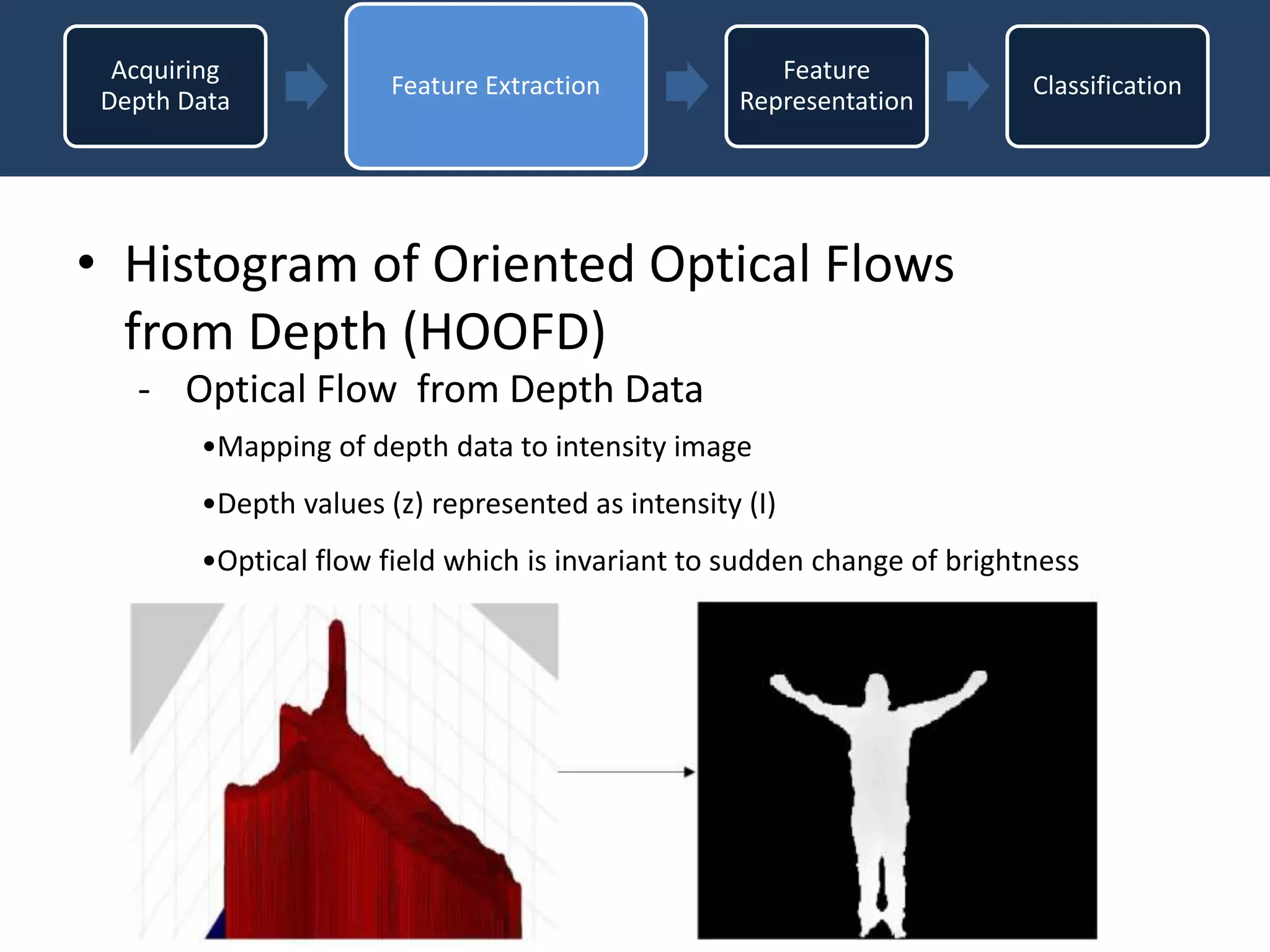
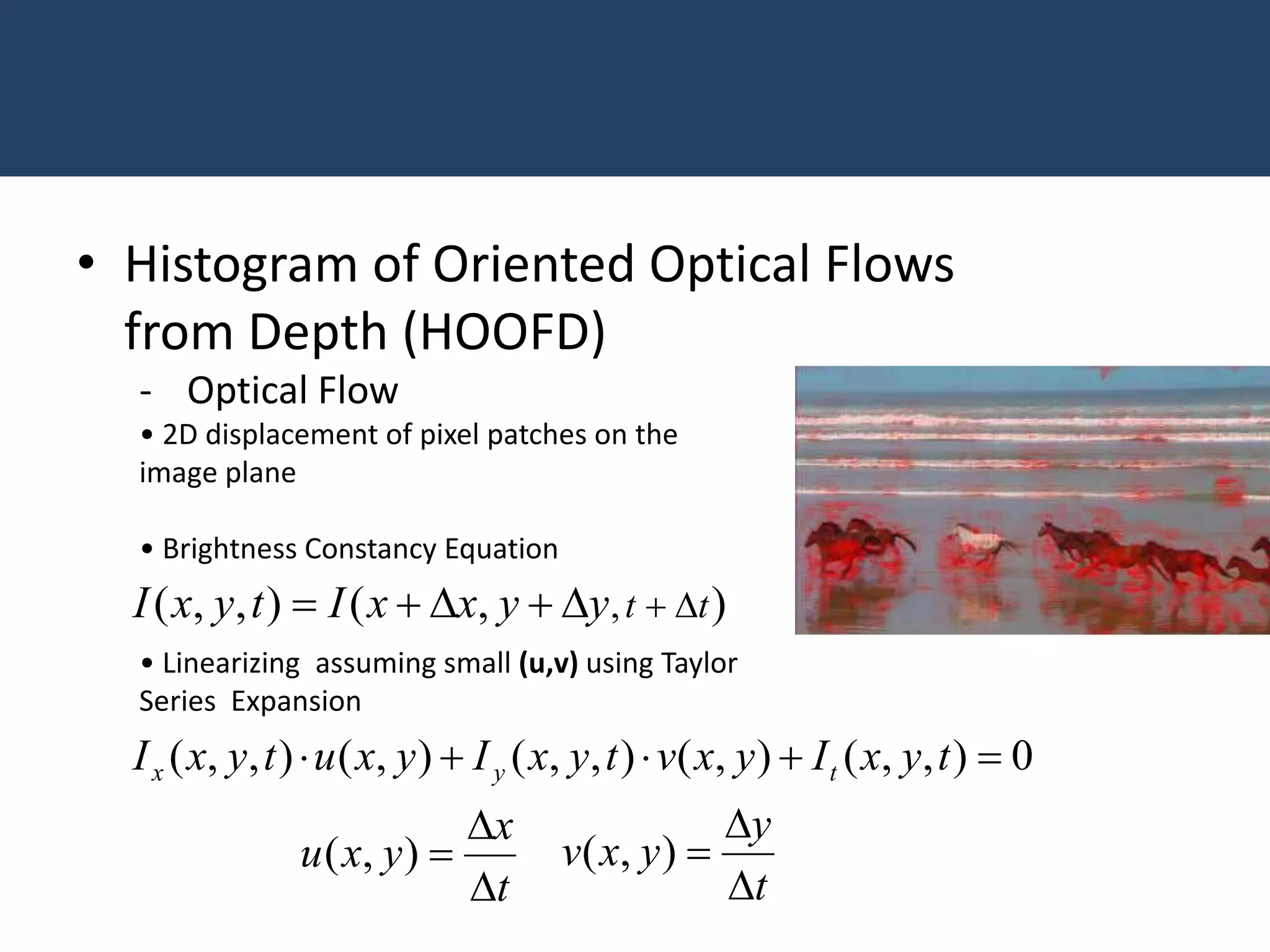
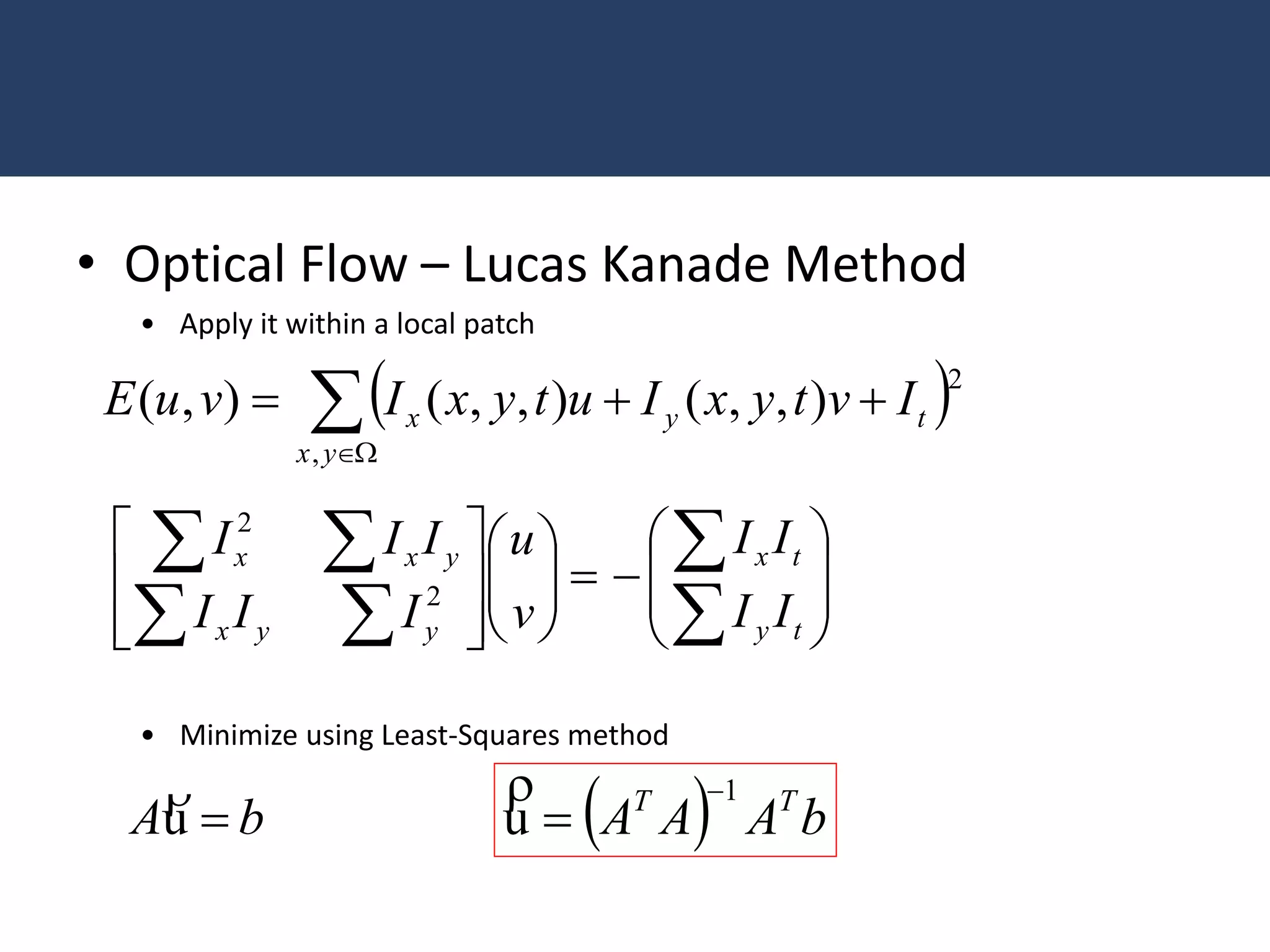
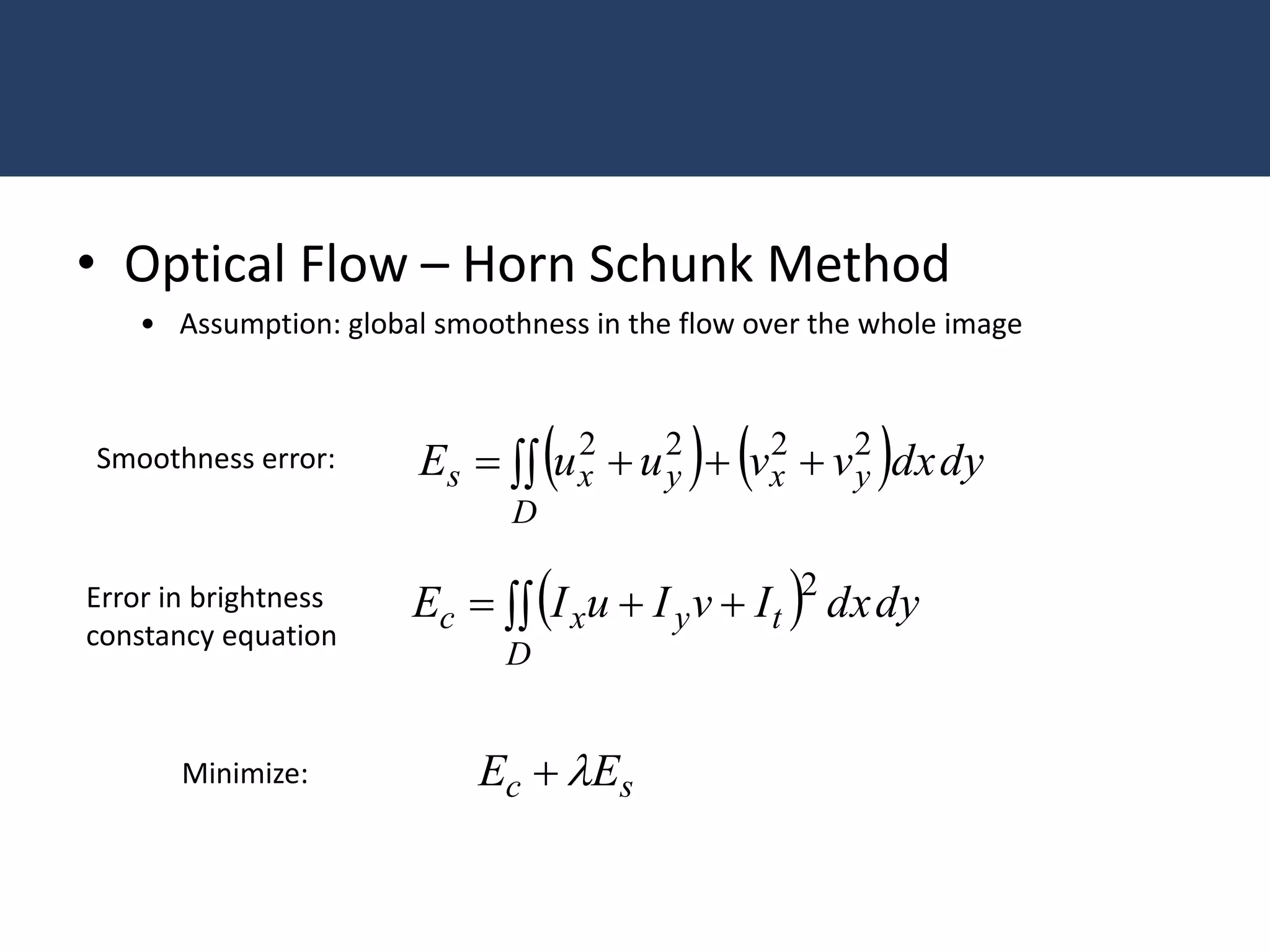
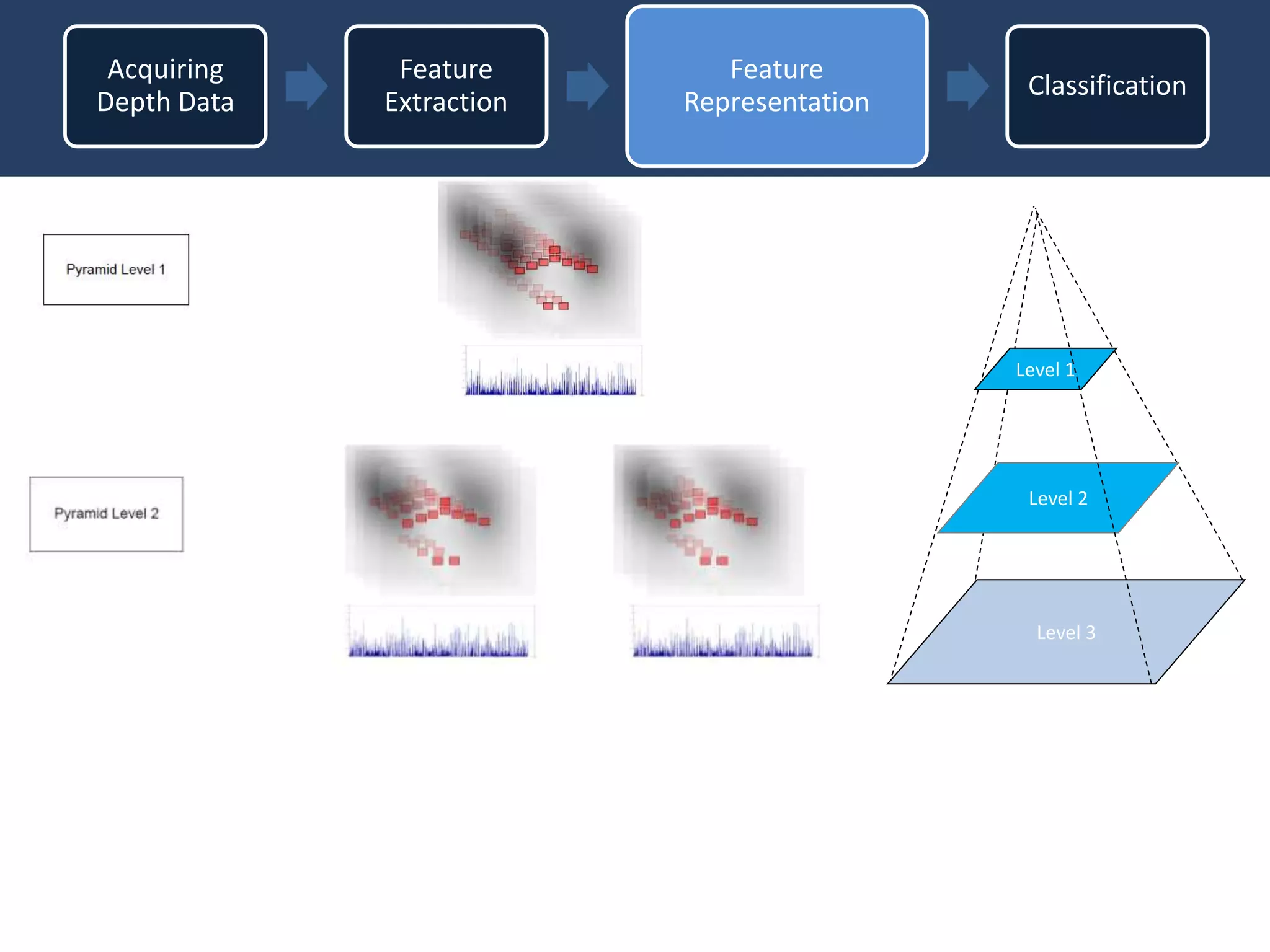
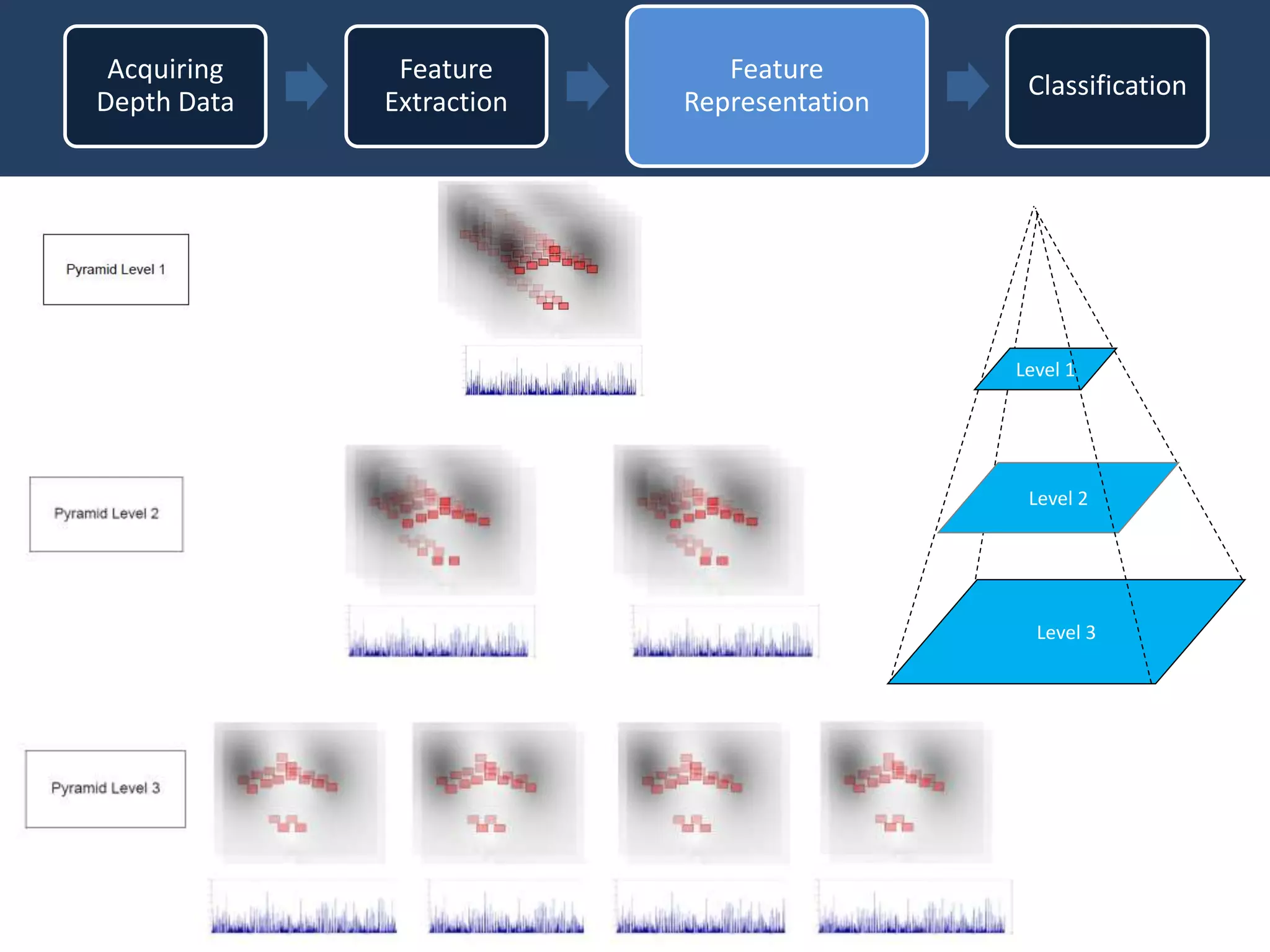
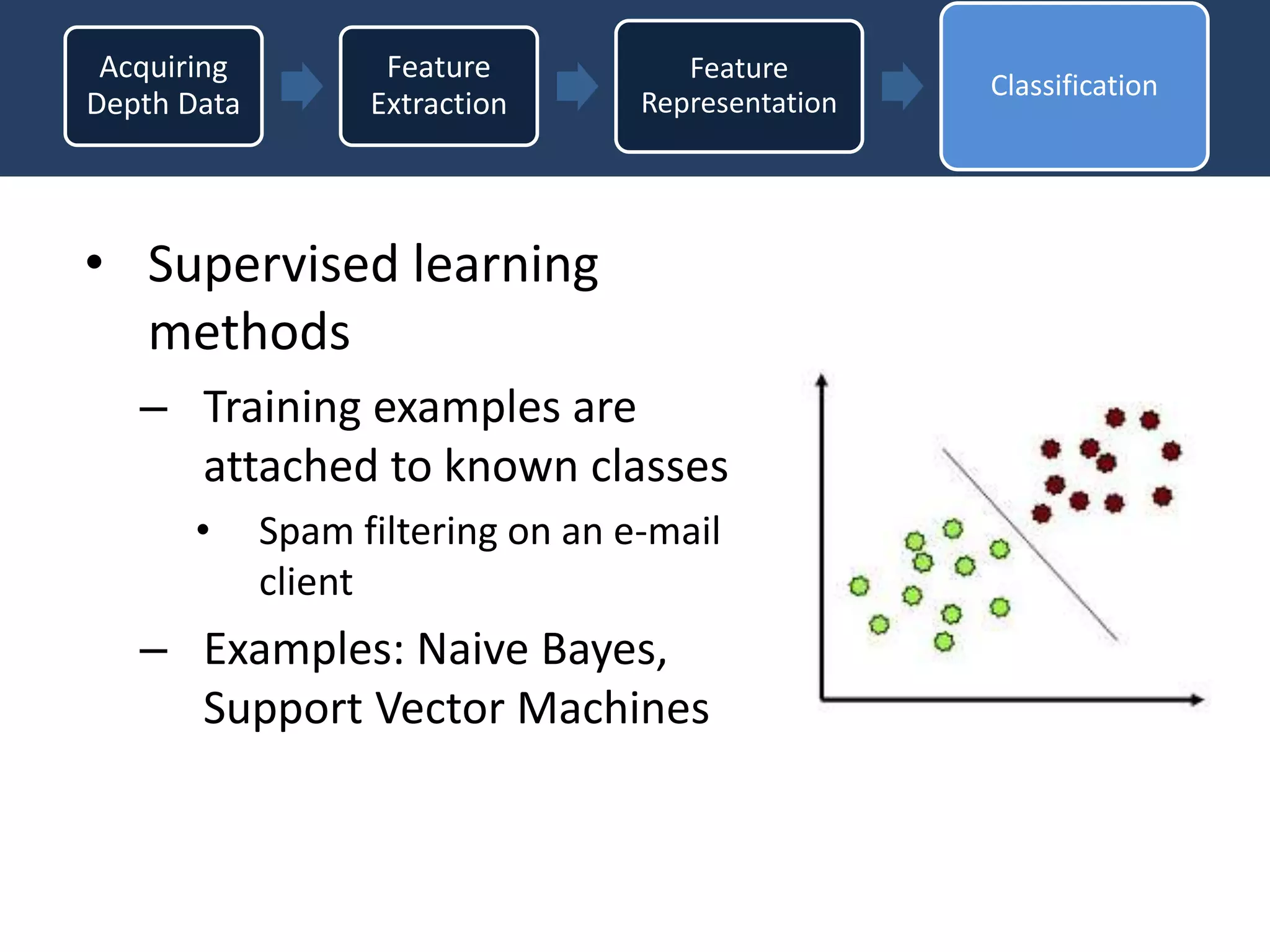
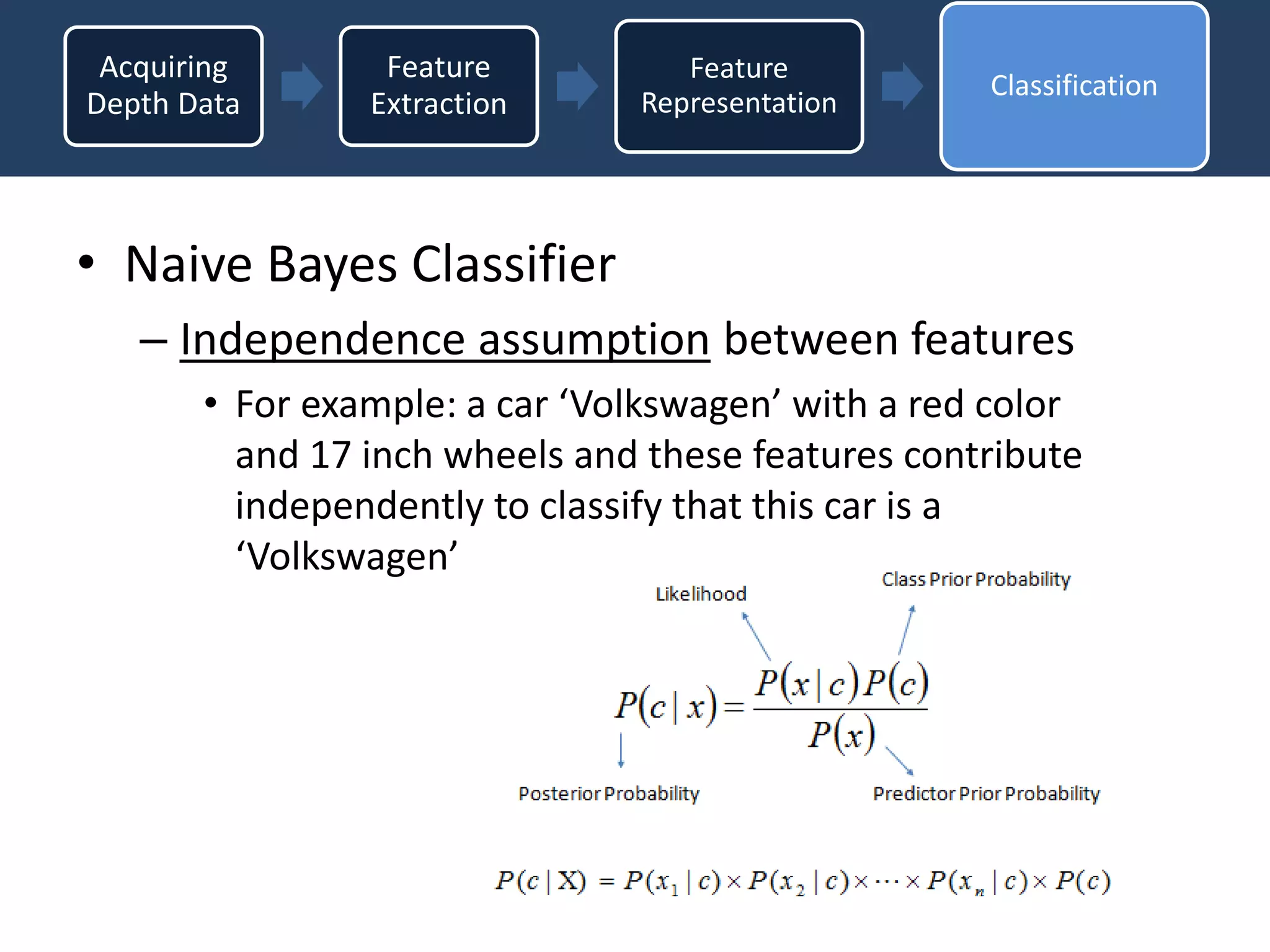

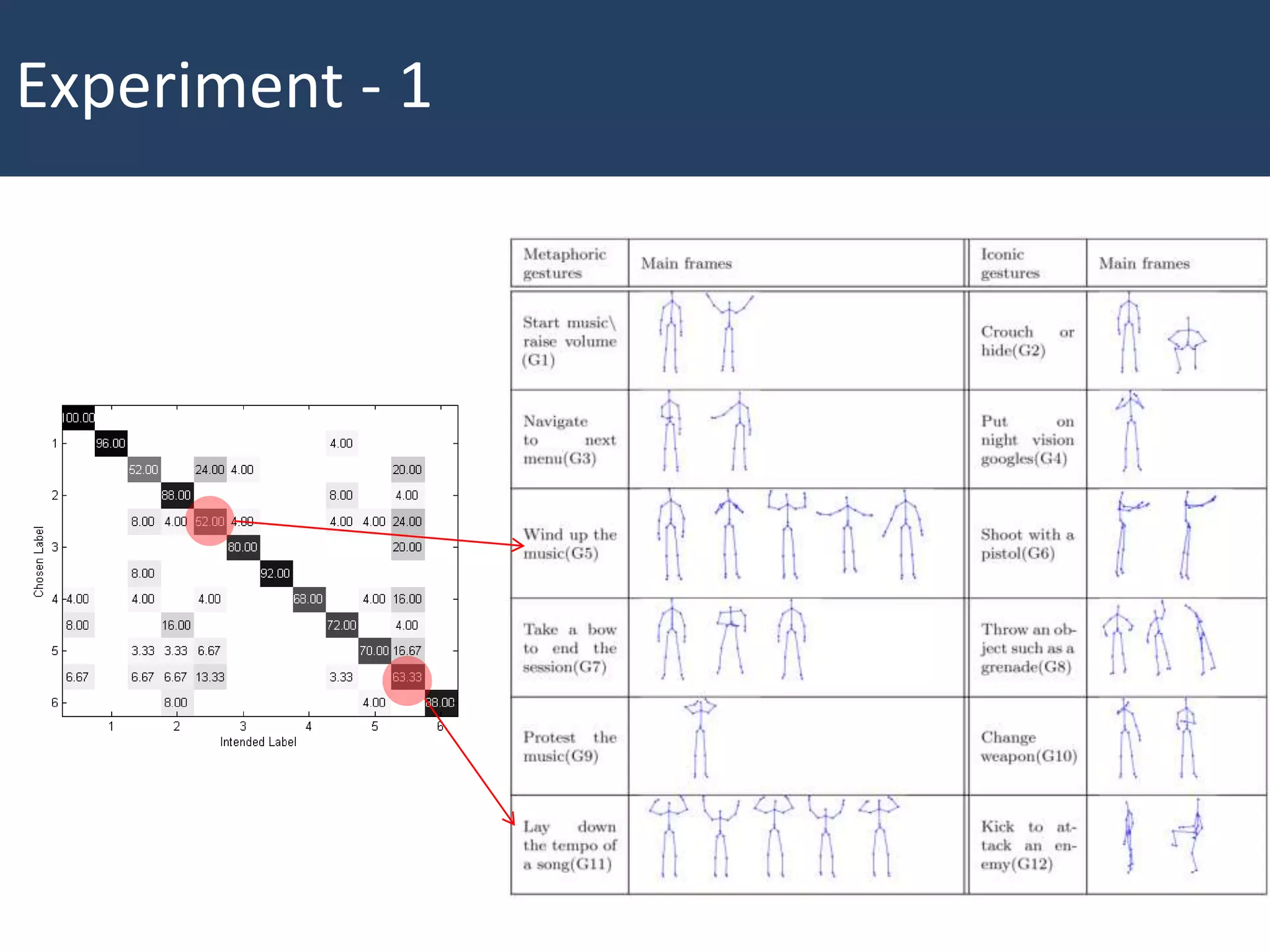

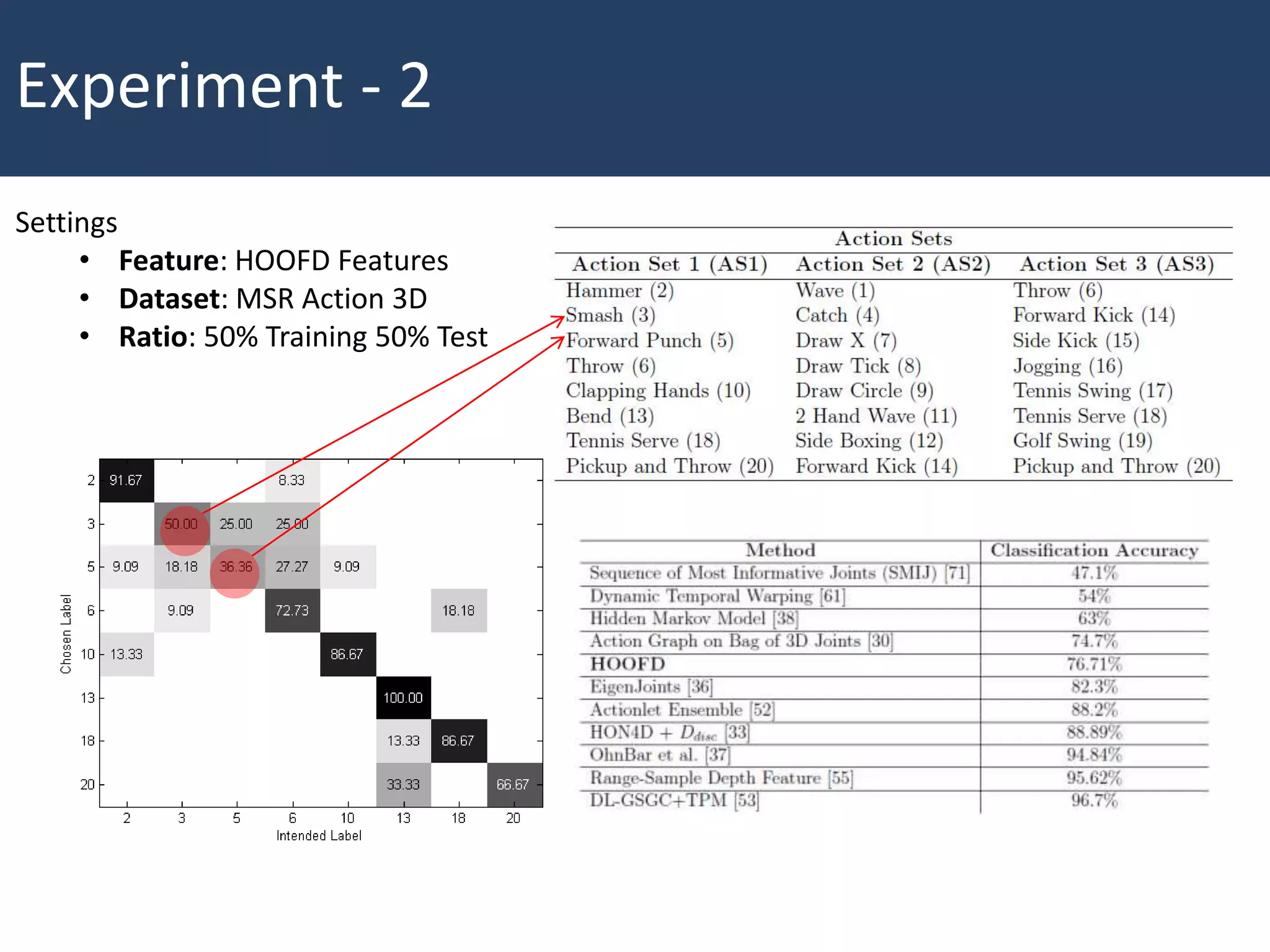
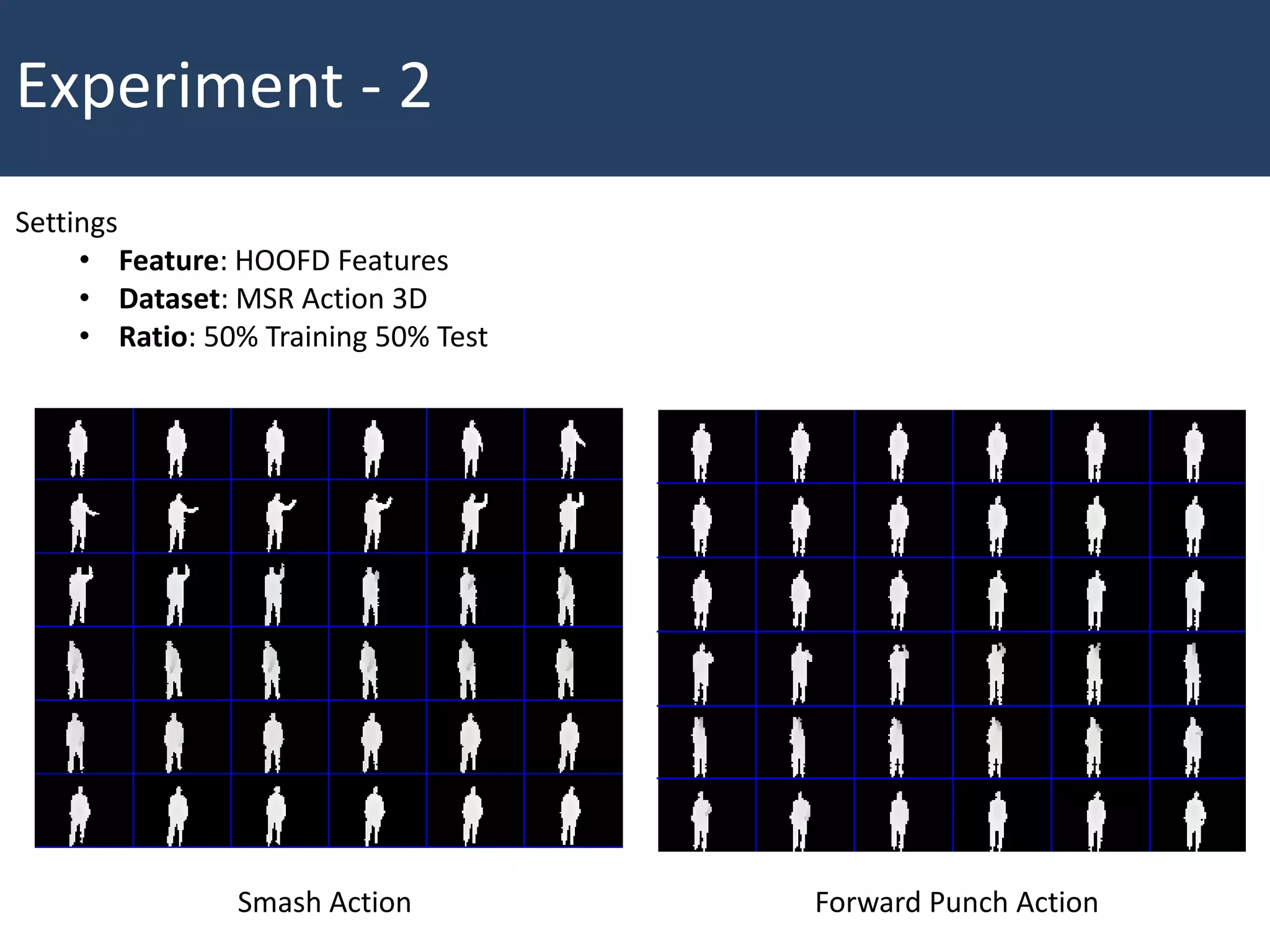
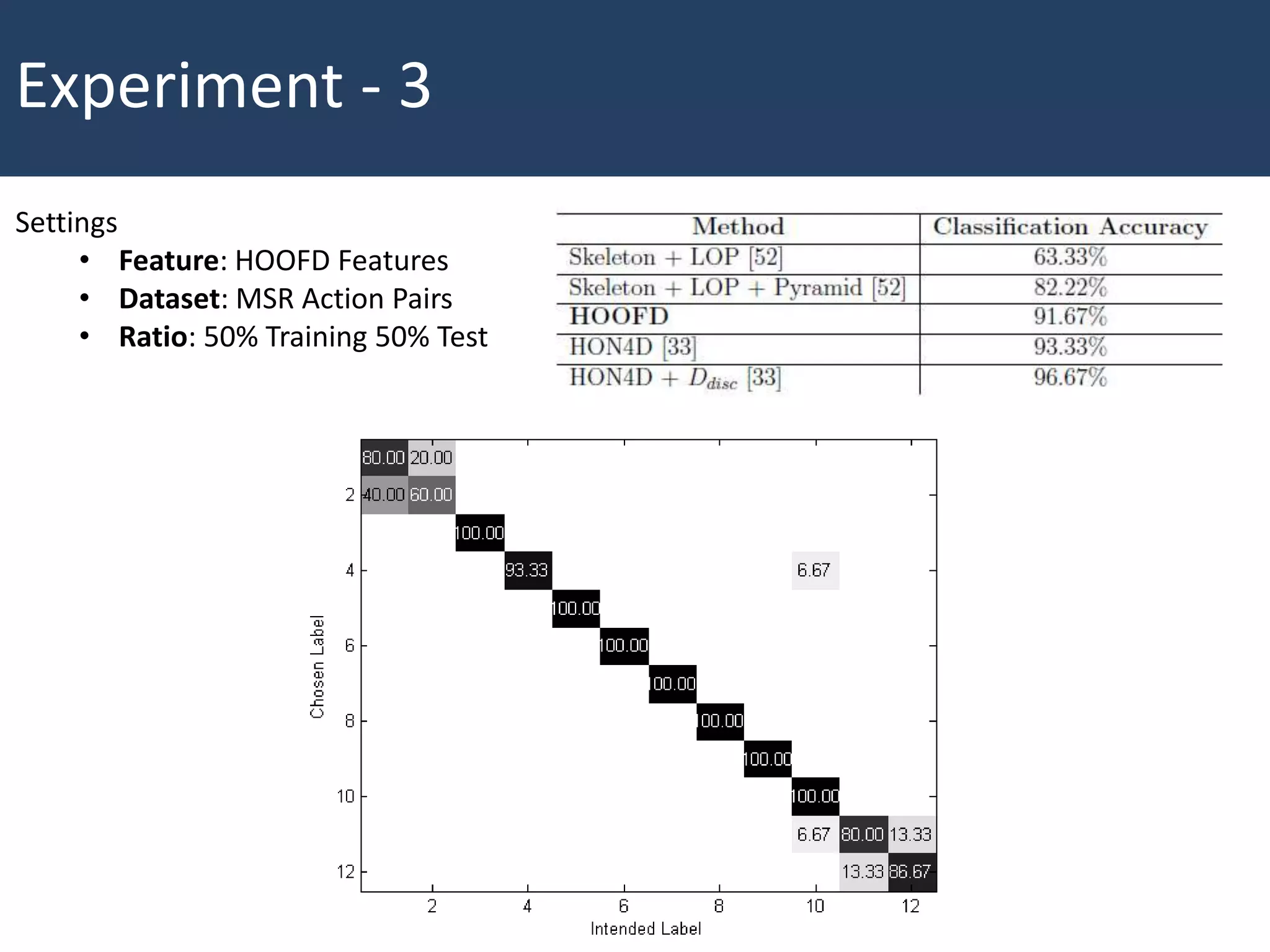


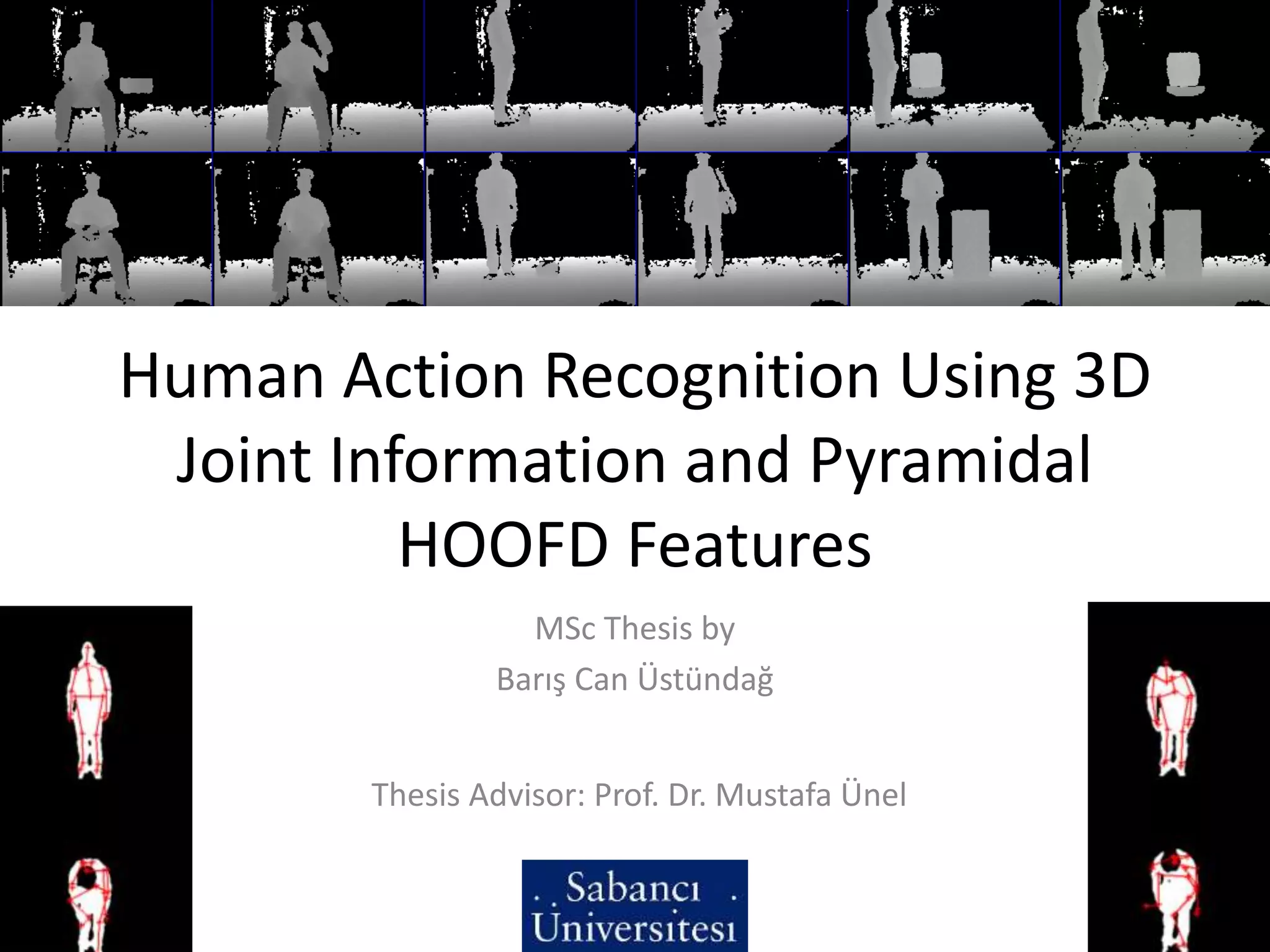
The thesis presents a novel framework for human action recognition by integrating 3D joint information with histogram of oriented optical flow from depth (hoofd) features. It details the methods for acquiring depth data, feature extraction, and classification, and evaluates the approach using various datasets. The results indicate the effectiveness of the proposed technique compared to existing algorithms, with suggestions for future improvements in feature utilization and classification methods.