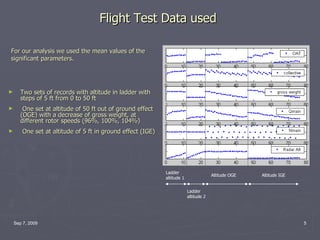
This document discusses a methodology for estimating control derivatives of a helicopter in ground effect from flight test data. It presents theories of momentum and blade element for rotor behavior. Flight test data was collected at various altitudes both in and out of ground effect. Polynomial models were fit to torque coefficient data to characterize effects of thrust, collective pitch, and altitude. Results showed the derivative of thrust with respect to collective pitch was 10-20% greater in ground effect, important information for helicopter simulators.

![In ground effect (IGE) theory Sep 7, 2009 In ground effect for same thrust as OGE: Less induced velocity (inflow ratio) Less collective blade pitch angle When altitude decrease, what is the effect on the derivative of CT versus collective control position ? ? In ground effect aerodynamical phenomenon when altitude Helicopter in hover: Thrust coefficient [1],[2],[3]:](https://image.slidesharecdn.com/hoverige-12523608545647-phpapp01/85/Hover-Ige-3-320.jpg)

![Data processing Sep 7, 2009 Torque coefficient for helicopter in hover [1],[2]: Polynomial fitting of C Q ( C T ) out of ground effect: Polynomial fitting of C Q (collective) : C Q vs. H C Q vs. C T C Q vs. collective](https://image.slidesharecdn.com/hoverige-12523608545647-phpapp01/85/Hover-Ige-6-320.jpg)
![Data processing 2 Sep 7, 2009 K(H) – Constant of ground effect vs. altitude [3]: Polynomial fitting of K(H) : Polynomial fitting of C Q (C T ,H) :](https://image.slidesharecdn.com/hoverige-12523608545647-phpapp01/85/Hover-Ige-7-320.jpg)