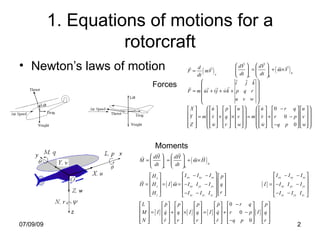
This document outlines the development of a helicopter flight simulator in Matlab/Simulink. It discusses (1) the equations of motion for modeling a rotorcraft's attitude and position using Newton's laws of motion and forces/moments. (2) Stability and control theory using a states vector to model aerodynamic forces from changes in states using stability derivatives for forces, moments, speeds and angular speeds. (3) The simulation model using a controls/states vector and linear differential equations. It then details the (4) Simulink schematic, (5) 6 degree of freedom Simulink model, and (6) including cockpit instruments and controls to evaluate (7) helicopter performance.












































![How to Write Emails People WANT to Respond to [Sales Template]](https://cdn.slidesharecdn.com/ss_thumbnails/how-to-write-emails-people-want-to-respond-to-131203110213-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)