Download to read offline


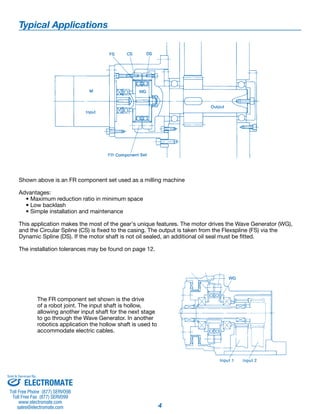









This document provides information about Harmonic Drive gearing, including: 1) It describes the basic assembly of a Harmonic Drive gearset which contains a wave generator, flexspline, circular spline, and dynamic spline. 2) It lists typical applications like robotics where the gearing is used to provide motion control. 3) It includes diagrams, specifications, and performance ratings for different Harmonic Drive models to help users select the appropriate gear for their application.






















































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)







