Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yuta Kashino
2,284 views
Gunosy2015 07-07
a
Technology
◦
Read more
6
Save
Share
Embed
Embed presentation
Download
Downloaded 15 times
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
8
/ 18
9
/ 18
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PPTX
Prml 11.1.4 重点サンプリング
by
Yo Ehara
PDF
Cvim chapter4-5-ken_hide
by
kenhide
PDF
公開鍵暗号(5): NP困難性
by
Joe Suzuki
PDF
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
PDF
深層学習ライブラリのプログラミングモデル
by
Yuta Kashino
PDF
Gunosy2015-06-03
by
Yuta Kashino
PDF
FLAME: Probabilistic Model Combining Aspect Based Opinion Mining and Collabor...
by
Yuta Kashino
PDF
Gunosy2015-08-05
by
Yuta Kashino
Prml 11.1.4 重点サンプリング
by
Yo Ehara
Cvim chapter4-5-ken_hide
by
kenhide
公開鍵暗号(5): NP困難性
by
Joe Suzuki
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
深層学習ライブラリのプログラミングモデル
by
Yuta Kashino
Gunosy2015-06-03
by
Yuta Kashino
FLAME: Probabilistic Model Combining Aspect Based Opinion Mining and Collabor...
by
Yuta Kashino
Gunosy2015-08-05
by
Yuta Kashino
Viewers also liked
PDF
Gunosy2015 09-16ts
by
Yuta Kashino
PDF
Opendata@tokyowebmining
by
Yuta Kashino
PDF
PyDataTokyo201-05-22
by
Yuta Kashino
PDF
"Automatic Variational Inference in Stan" NIPS2015_yomi2016-01-20
by
Yuta Kashino
PDF
Chainer meetup2016 03-19pub
by
Yuta Kashino
PDF
Deep learning Libs @twm
by
Yuta Kashino
PDF
機械学習ビジネス研究会 第01回
by
Yuta Kashino
PDF
日本のオープンデータプラットフォームをPythonでつくる
by
Yuta Kashino
PDF
Gunosy go2015 06-02
by
Yuta Kashino
PDF
TensorFlow White Paperを読む
by
Yuta Kashino
PDF
深層学習ライブラリの環境問題Chainer Meetup2016 07-02
by
Yuta Kashino
PDF
PyConJP2016: 週末サイエンティストのススメ
by
Yuta Kashino
PDF
線形カルマンフィルタの導出
by
Fumiya Watanabe
PDF
お前の逐モン、GETだぜ!
by
Nagi Teramo
PDF
R勉強会@東京 - Tokyo.Rの紹介
by
Yohei Sato
PDF
Tokyor10 opening
by
Yohei Sato
PPTX
Tokyo r49 beginner
by
Takashi Minoda
PPTX
カルマンフィルタについて
by
tiny_ak
PDF
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
PDF
状態空間モデルの実行方法と実行環境の比較
by
Hiroki Itô
Gunosy2015 09-16ts
by
Yuta Kashino
Opendata@tokyowebmining
by
Yuta Kashino
PyDataTokyo201-05-22
by
Yuta Kashino
"Automatic Variational Inference in Stan" NIPS2015_yomi2016-01-20
by
Yuta Kashino
Chainer meetup2016 03-19pub
by
Yuta Kashino
Deep learning Libs @twm
by
Yuta Kashino
機械学習ビジネス研究会 第01回
by
Yuta Kashino
日本のオープンデータプラットフォームをPythonでつくる
by
Yuta Kashino
Gunosy go2015 06-02
by
Yuta Kashino
TensorFlow White Paperを読む
by
Yuta Kashino
深層学習ライブラリの環境問題Chainer Meetup2016 07-02
by
Yuta Kashino
PyConJP2016: 週末サイエンティストのススメ
by
Yuta Kashino
線形カルマンフィルタの導出
by
Fumiya Watanabe
お前の逐モン、GETだぜ!
by
Nagi Teramo
R勉強会@東京 - Tokyo.Rの紹介
by
Yohei Sato
Tokyor10 opening
by
Yohei Sato
Tokyo r49 beginner
by
Takashi Minoda
カルマンフィルタについて
by
tiny_ak
状態空間モデルの考え方・使い方 - TokyoR #38
by
horihorio
状態空間モデルの実行方法と実行環境の比較
by
Hiroki Itô
Similar to Gunosy2015 07-07
PDF
Data assim r
by
Xiangze
PDF
第61回CV勉強会「CVPR2024読み会」(前編)発表資料:State Space Models for Event Cameras
by
Takuya Minagawa
PDF
パターン認識と機械学習 13章 系列データ
by
emonosuke
PDF
20141220 tokyowebmining state_spacemodel
by
Kenny ISHIMURA
PPTX
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
PDF
Trader-Company Method: A Metaheuristic for Interpretable Stock Price Predict...
by
taguchi naoya
PPTX
カルマンフィルタ入門
by
Yasunori Nihei
PDF
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
PDF
Stanとdlmによる状態空間モデル
by
Hiroki Itô
PPTX
「予測にいかす統計モデリングの基本」勉強会 第一章
by
Takahiro Yoshinaga
PDF
確率的自己位置推定
by
Horiguchi Shuhei
PDF
[DL輪読会]"Dynamical Isometry and a Mean Field Theory of CNNs: How to Train 10,0...
by
Deep Learning JP
PDF
観測雑音に双曲線正割分布を用いた上界最小化に基づくカルマンフィルタ
by
Hiroki_Tanji
PPTX
Graph convolution (スペクトルアプローチ)
by
yukihiro domae
PDF
Semantic segmentation
by
Takuya Minagawa
PDF
Fisher Vectorによる画像認識
by
Takao Yamanaka
PDF
20101002 cd sigfin_spx_ss
by
Takanobu Mizuta
PDF
データマイニング勉強会3
by
Yohei Sato
PDF
NN, CNN, and Image Analysis
by
Yuki Shimada
PDF
パターン認識 第12章 正則化とパス追跡アルゴリズム
by
Miyoshi Yuya
Data assim r
by
Xiangze
第61回CV勉強会「CVPR2024読み会」(前編)発表資料:State Space Models for Event Cameras
by
Takuya Minagawa
パターン認識と機械学習 13章 系列データ
by
emonosuke
20141220 tokyowebmining state_spacemodel
by
Kenny ISHIMURA
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
Trader-Company Method: A Metaheuristic for Interpretable Stock Price Predict...
by
taguchi naoya
カルマンフィルタ入門
by
Yasunori Nihei
時系列解析の使い方 - TokyoWebMining #17
by
horihorio
Stanとdlmによる状態空間モデル
by
Hiroki Itô
「予測にいかす統計モデリングの基本」勉強会 第一章
by
Takahiro Yoshinaga
確率的自己位置推定
by
Horiguchi Shuhei
[DL輪読会]"Dynamical Isometry and a Mean Field Theory of CNNs: How to Train 10,0...
by
Deep Learning JP
観測雑音に双曲線正割分布を用いた上界最小化に基づくカルマンフィルタ
by
Hiroki_Tanji
Graph convolution (スペクトルアプローチ)
by
yukihiro domae
Semantic segmentation
by
Takuya Minagawa
Fisher Vectorによる画像認識
by
Takao Yamanaka
20101002 cd sigfin_spx_ss
by
Takanobu Mizuta
データマイニング勉強会3
by
Yohei Sato
NN, CNN, and Image Analysis
by
Yuki Shimada
パターン認識 第12章 正則化とパス追跡アルゴリズム
by
Miyoshi Yuya
More from Yuta Kashino
PDF
時系列データと確率的プログラミング tfp.sts
by
Yuta Kashino
PDF
Python kansai2019
by
Yuta Kashino
PDF
Mlse20190208
by
Yuta Kashino
PDF
Ml15m2018 10-27
by
Yuta Kashino
PDF
Pydata2017 11-29
by
Yuta Kashino
PDF
私は如何にして心配するのを止めてPyTorchを愛するようになったか
by
Yuta Kashino
PDF
Pycon2017
by
Yuta Kashino
PDF
ベイジアンディープニューラルネット
by
Yuta Kashino
PDF
深層学習とベイズ統計
by
Yuta Kashino
PDF
Wasserstein GAN Tfug2017 07-12
by
Yuta Kashino
PDF
確率的プログラミングライブラリEdward
by
Yuta Kashino
時系列データと確率的プログラミング tfp.sts
by
Yuta Kashino
Python kansai2019
by
Yuta Kashino
Mlse20190208
by
Yuta Kashino
Ml15m2018 10-27
by
Yuta Kashino
Pydata2017 11-29
by
Yuta Kashino
私は如何にして心配するのを止めてPyTorchを愛するようになったか
by
Yuta Kashino
Pycon2017
by
Yuta Kashino
ベイジアンディープニューラルネット
by
Yuta Kashino
深層学習とベイズ統計
by
Yuta Kashino
Wasserstein GAN Tfug2017 07-12
by
Yuta Kashino
確率的プログラミングライブラリEdward
by
Yuta Kashino
Recently uploaded
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
PDF
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
Gunosy2015 07-07
1.
北川源四郎「時系列解析入門」 第 9
章 柏野 雄太 バクフー株式会社 July 8, 2015
2.
注意 この本は名著ではありますが,役割的に「時系列解析のチートシート」 的な存在で,全体的に記述があっさりしすぎています. 特に 9 章,10
章の状態空間モデルの部分は記述が少なすぎますので, 以下の書籍等で足りない部分を補う必要があります. カルマンフィルタは通常工学部の大学 4 年生から修士 1 年のときに, 半期の講義+演習でガッツリやるようなレベルです. 状態空間モデル: 樋口知之「予測にいかす統計モデリングの基礎」 樋口知之+「データ同化入門」 カルマンフィルタ: 足立修一・丸田一郎「カルマンフィルタの基礎」 R のパッケージ dlm: Petris+「R によるベイジアン動的線型モデル」 状態空間モデルの古典的入門書: コマンダー&クープマン「状態空間時系列分析入門」 2 / 1
3.
状態空間モデル 状態空間モデル xn = Fnxn−1
+ Gnvn (9.1) yn = Hnxn + wn (9.2) yn: 観測される時系列 次元 l xn: 状態 (state) 次元 k vn: システムノイズ(状態ノイズ) 平均ベクトル 0, 分散共分散行列 Qn に従う m 次元の正規白色ノイズ wn: 観測ノイズ 平均ベクトル 0, 分散共分散行列 Rn に従う l 次元の正 規白色ノイズ Fn: k × k 次元 Gn: k × m 次元 Hn: l × k 次元 3 / 1
4.
状態空間モデルの解釈 状態空間モデル xn = Fnxn−1
+ Gnvn (9.1) yn = Hnxn + wn (9.2) 回帰モデルとしての解釈: 観測モデルは観測 yn を表現する回帰モデルで,xn が回帰係数,シス テムモデルはその時間発展 信号理論としての解釈: システムモデルは信号発生メカニズム,観測モデルはノイズが付加さ れる様子を記述. 4 / 1
5.
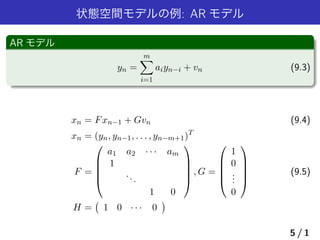
状態空間モデルの例: AR モデル AR
モデル yn = m∑ i=1 aiyn−i + vn (9.3) xn = Fxn−1 + Gvn (9.4) xn = (yn, yn−1, . . . , yn−m+1)T F = a1 a2 · · · am 1 ... 1 0 , G = 1 0 ... 0 (9.5) H = ( 1 0 · · · 0 ) 5 / 1
6.
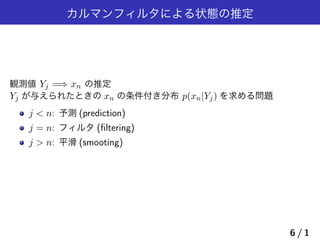
カルマンフィルタによる状態の推定 観測値 Yj =⇒
xn の推定 Yj が与えられたときの xn の条件付き分布 p(xn|Yj) を求める問題 j < n: 予測 (prediction) j = n: フィルタ (filtering) j > n: 平滑 (smooting) 6 / 1
7.
カルマンフィルタ Kalman filter [条件付き平均と共分散] xn|j
≡ E(xn|Yj) Vn|j ≡ E ( (xn − xn|j)(xn − xn|j)T ) (9.11) [一期先予測] xn|n−1 = Fnxn−1|n−1 Vn|n−1 = FnVn−1|n−1FT n + GnQnGT n (9.12) [フィルタ] Kn = Vn|n−1HT n (HnVn|n−1HT n + Rn)−1 xn|n = xn|n−1 + Kn(yn − Hnxn|n−1) Vn|n = (I − KnHn)Vn|n−1 (9.13) 7 / 1
8.
カルマンフィルタの逐次計算 x1|0 −→ x2|0
−→ x3|0 −→ x4|0 −→ x5|0 −→ ⇓ x1|1 =⇒ x2|1 −→ x3|1 −→ x4|1 −→ x5|1 −→ ⇓ x1|2 ←− x2|2 =⇒ x3|2 −→ x4|2 −→ x5|2 −→ ⇓ x1|3 ←− x2|3 ←− x3|3 =⇒ x4|3 −→ x5|3 −→ ⇓ x1|4 ←− x2|4 ←− x3|4 ←− x4|4 =⇒ x5|4 −→ ⇓ [ノーテーション] ⇓: フィルタ, =⇒: 予測, ←−: 平滑化, −→: 長期予測 8 / 1
9.
9.3 平滑化のアルゴリズム YN =
y1, · · · , yN が与えられたとき,途中状態の xn を推定する. [固定区間平滑化] An = Vn|nFT n+1V −1 n+1|n xn|N = xn|n + An(xn+1|N − xn+1|n) Vn|N = Vn|n + An(Vn+1|N − Vn+1|n)AT n (9.14) 9 / 1
10.
9.4 状態の長期予測 Yn =
{y1, · · · , yn} に基づいて,1 期先予想をクリア消し,j 期先の状 態 xn+j(j > 1) を推定する. カルマンフィルタにより一期先の xn+1|n と xn+1|n を求める. yn+1 は得られないが,Yn+1 = Yn と仮定する =⇒ xn+1|n+1 = xn+1|n, Vn+1|n+1 = Vn+1|n カルマンフィルタの n + 1 期に対する 1 期先アルゴリズムから 2 期先 予測が得られる. xn+2|n = Fn+2xn+1|n Vn2|n = Fn+2Vn+1|nFT n+2 + Gn+2Qn+2GT n+2 (9.15) [長期予測] xn+i|n = Fn+ixn+i−1|n Vni|n = Fn+iVn+i−1|nFT n+i + Gn+iQn+iGT n+i (9.16) 10 / 1
11.
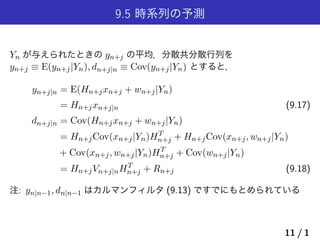
9.5 時系列の予測 Yn が与えられたときの
yn+j の平均,分散共分散行列を yn+j ≡ E(yn+j|Yn), dn+j|n ≡ Cov(yn+j|Yn) とすると, yn+j|n = E(Hn+jxn+j + wn+j|Yn) = Hn+jxn+j|n (9.17) dn+j|n = Cov(Hn+jxn+j + wn+j|Yn) = Hn+jCov(xn+j|Yn)HT n+j + Hn+jCov(xn+j, wn+j|Yn) + Cov(xn+j, wn+j|Yn)HT n+j + Cov(wn+j|Yn) = Hn+jVn+j|nHT n+j + Rn+j (9.18) 注: yn|n−1, dn|n−1 はカルマンフィルタ (9.13) ですでにもとめられている 11 / 1
12.
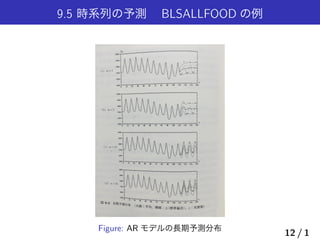
9.5 時系列の予測 BLSALLFOOD
の例 Figure: AR モデルの長期予測分布 12 / 1
13.
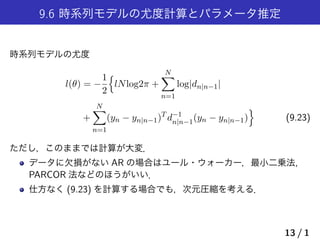
9.6 時系列モデルの尤度計算とパラメータ推定 時系列モデルの尤度 l(θ) =
− 1 2 { lNlog2π + N∑ n=1 log|dn|n−1| + N∑ n=1 (yn − yn|n−1)T d−1 n|n−1(yn − yn|n−1) } (9.23) ただし,このままでは計算が大変. データに欠損がない AR の場合はユール・ウォーカー,最小二乗法, PARCOR 法などのほうがいい. 仕方なく (9.23) を計算する場合でも,次元圧縮を考える. 13 / 1
14.
9.6 時系列モデルの尤度計算とパラメータ推定 次元圧縮の方法: 時系列の次元が
l = 1 で wn の分散が Rn = σ2 で一定の 場合 1 R = 1 としてカルマンフィルタ (カルマンゲインを計算すると R = σ2 でも R = 1 でも同じ) 2 以下の式により ˆσ2 を求める ˆσ2 = 1 N N∑ n=1 (yn − yn|n−1)2 ˜dn|n−1 (9.28) 3 以下の式により対数尤度 l(θ∗) を求める l(θ∗ ) = − 1 2 { Nlog2πˆσ2 + N∑ n=1 log ˜dn|n−1+N } (9.29) 4 1, 2, 3 のステップを繰り返して,対数尤度 l(θ∗) を最大化して,最尤 推定値 θ∗ を求める 14 / 1
15.
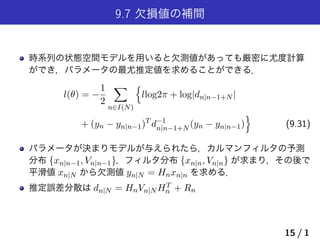
9.7 欠損値の補間 時系列の状態空間モデルを用いると欠測値があっても厳密に尤度計算 ができ,パラメータの最尤推定値を求めることができる. l(θ) =
− 1 2 ∑ n∈I(N) { llog2π + log|dn|n−1+N | + (yn − yn|n−1)T d−1 n|n−1+N (yn − yn|n−1) } (9.31) パラメータが決まりモデルが与えられたら,カルマンフィルタの予測 分布 {xn|n−1, Vn|n−1},フィルタ分布 {xn|n, Vn|n} が求まり,その後で 平滑値 xn|N から欠測値 yn|N = Hnxn|n を求める. 推定誤差分散は dn|N = HnVn|N HT n + Rn 15 / 1
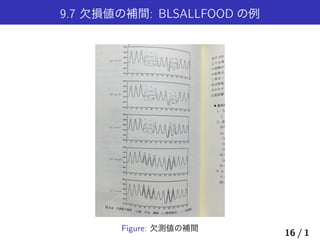
16.
9.7 欠損値の補間: BLSALLFOOD
の例 Figure: 欠測値の補間 16 / 1
17.
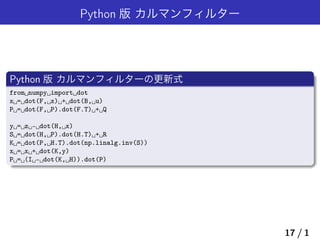
Python 版 カルマンフィルター Python
版 カルマンフィルターの更新式 from␣numpy␣import␣dot x␣=␣dot(F,␣x)␣+␣dot(B,␣u) P␣=␣dot(F,␣P).dot(F.T)␣+␣Q y␣=␣z␣-␣dot(H,␣x) S␣=␣dot(H,␣P).dot(H.T)␣+␣R K␣=␣dot(P,␣H.T).dot(np.linalg.inv(S)) x␣=␣x␣+␣dot(K,y) P␣=␣(I␣-␣dot(K,␣H)).dot(P) 17 / 1
18.
MATLAB 版 カルマンフィルター MATLAB
版 カルマンフィルターの更新関数 function␣[xhat_new,P_new,␣G]␣=␣kf(A,␣B,␣Bu,␣C,␣Q,␣R,␣u,␣y,␣xhat,␣P) ␣␣xhat␣=␣xhat(:); ␣␣u␣=␣u(:); ␣␣y␣=␣y(:); ␣␣xhatm␣=␣A*xhat␣+␣Bu*u; ␣␣Pm␣=␣A*P*A’␣+␣B*Q*B’; ␣␣G␣=␣Pm*C/(C’*Pm*C␣+␣R); ␣␣xhat_new␣=␣xhatm␣+␣G*(y␣-␣C’*xhatm); ␣␣P_new␣=␣(eye(size(A))␣-␣G*C’)*Pm; end 18 / 1
Download

![カルマンフィルタ Kalman filter
[条件付き平均と共分散]
xn|j ≡ E(xn|Yj)
Vn|j ≡ E
(
(xn − xn|j)(xn − xn|j)T
)
(9.11)
[一期先予測]
xn|n−1 = Fnxn−1|n−1
Vn|n−1 = FnVn−1|n−1FT
n + GnQnGT
n (9.12)
[フィルタ]
Kn = Vn|n−1HT
n (HnVn|n−1HT
n + Rn)−1
xn|n = xn|n−1 + Kn(yn − Hnxn|n−1)
Vn|n = (I − KnHn)Vn|n−1 (9.13)
7 / 1](https://image.slidesharecdn.com/gunosy2015-07-07-150708104914-lva1-app6892/85/Gunosy2015-07-07-7-320.jpg)
![カルマンフィルタの逐次計算
x1|0 −→ x2|0 −→ x3|0 −→ x4|0 −→ x5|0 −→
⇓
x1|1 =⇒ x2|1 −→ x3|1 −→ x4|1 −→ x5|1 −→
⇓
x1|2 ←− x2|2 =⇒ x3|2 −→ x4|2 −→ x5|2 −→
⇓
x1|3 ←− x2|3 ←− x3|3 =⇒ x4|3 −→ x5|3 −→
⇓
x1|4 ←− x2|4 ←− x3|4 ←− x4|4 =⇒ x5|4 −→
⇓
[ノーテーション] ⇓: フィルタ, =⇒: 予測, ←−: 平滑化, −→: 長期予測
8 / 1](https://image.slidesharecdn.com/gunosy2015-07-07-150708104914-lva1-app6892/85/Gunosy2015-07-07-8-320.jpg)
![9.3 平滑化のアルゴリズム
YN = y1, · · · , yN が与えられたとき,途中状態の xn を推定する.
[固定区間平滑化]
An = Vn|nFT
n+1V −1
n+1|n
xn|N = xn|n + An(xn+1|N − xn+1|n)
Vn|N = Vn|n + An(Vn+1|N − Vn+1|n)AT
n (9.14)
9 / 1](https://image.slidesharecdn.com/gunosy2015-07-07-150708104914-lva1-app6892/85/Gunosy2015-07-07-9-320.jpg)
![9.4 状態の長期予測
Yn = {y1, · · · , yn} に基づいて,1 期先予想をクリア消し,j 期先の状
態 xn+j(j > 1) を推定する.
カルマンフィルタにより一期先の xn+1|n と xn+1|n を求める.
yn+1 は得られないが,Yn+1 = Yn と仮定する =⇒
xn+1|n+1 = xn+1|n, Vn+1|n+1 = Vn+1|n
カルマンフィルタの n + 1 期に対する 1 期先アルゴリズムから 2 期先
予測が得られる.
xn+2|n = Fn+2xn+1|n
Vn2|n = Fn+2Vn+1|nFT
n+2 + Gn+2Qn+2GT
n+2 (9.15)
[長期予測]
xn+i|n = Fn+ixn+i−1|n
Vni|n = Fn+iVn+i−1|nFT
n+i + Gn+iQn+iGT
n+i (9.16)
10 / 1](https://image.slidesharecdn.com/gunosy2015-07-07-150708104914-lva1-app6892/85/Gunosy2015-07-07-10-320.jpg)

![MATLAB 版 カルマンフィルター
MATLAB 版 カルマンフィルターの更新関数
function␣[xhat_new,P_new,␣G]␣=␣kf(A,␣B,␣Bu,␣C,␣Q,␣R,␣u,␣y,␣xhat,␣P)
␣␣xhat␣=␣xhat(:);
␣␣u␣=␣u(:);
␣␣y␣=␣y(:);
␣␣xhatm␣=␣A*xhat␣+␣Bu*u;
␣␣Pm␣=␣A*P*A’␣+␣B*Q*B’;
␣␣G␣=␣Pm*C/(C’*Pm*C␣+␣R);
␣␣xhat_new␣=␣xhatm␣+␣G*(y␣-␣C’*xhatm);
␣␣P_new␣=␣(eye(size(A))␣-␣G*C’)*Pm;
end
18 / 1](https://image.slidesharecdn.com/gunosy2015-07-07-150708104914-lva1-app6892/85/Gunosy2015-07-07-18-320.jpg)







































![[DL輪読会]"Dynamical Isometry and a Mean Field Theory of CNNs: How to Train 10,0...](https://cdn.slidesharecdn.com/ss_thumbnails/wakasugi-180824003300-thumbnail.jpg?width=640&height=640&fit=bounds)
























