Download to read offline

![Abstract
Vertex colouring problem is a combinatorial problem in which a colour
is assigned to each vertex of the graph such that no two adjacent ver-
tices have the same colour[6]. We initialize the use of graph dynamical
system to model a distributed computation for solving the vertex colour-
ing problem on graphs. Graph dynamical system provide a model of
Graph-cellular Automaton to find a way to colour graph. In this report
Graph-cellular Automaton is proposed for finding a solution of the ver-
tex colouring problem. Each vertex chooses its optimal colour based on
the colours selected by its adjacent vertices. A simulation experiments is
to show the proposed algorithm. The obtained results show whether the
graph dynamical system is appropriate for solving colouring problem.
Contents
1 Introduction 3
2 Planar Graph and Colouring 4
2.1 Planar Graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Graph Colouring . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Graph Dynamical System 8
3.1 basic problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Graph Colouring with GDS 10
4.1 implementation of colouring graph with GDS . . . . . . . . . . . 10
4.2 Colour some specified case . . . . . . . . . . . . . . . . . . . . . . 11
5 Conclusion 33
2](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-2-320.jpg)
![1 Introduction
Graph colouring problem is a classical combinatorial optimization problem ni
graph theory. Graph colouring show up a great many kind of forms, for exam-
ple, vertex colouring, edge colouring, multicolouring, etc[1]. Graph colouring is
widely used in our life, such as computer register allocation[4], air traffic flow
management[2], and so on. Colouring is a well-known NP-hard problem for gen-
eral graph[9]. Vertex colouring problem is also a well-know colouring problem.
A proper vertex colouring of graph G = (V, E) where V is the set of |V | vertices
and E is the set of |E| edge, is to assign different colours to each vertex in order
that no two adjacent vertices are given the same colour. The chromatic number
χ(G) is a colouring parameter defined as the minimum number of colours that
should appear in the most colourful closed neighbourhood of a vertex under any
proper colouring of the graph[3].
Cellular automata are dynamical systems in computability theory, mathemat-
ics, etc, which were originally discovered by John von Neumann in 1940s[8].
The use of the Cellular Automata (CA) paradigm is emerging as a powerful
approach to the analysis and design of complex systems[10]. It is an important
model in computation theory. Cellular automata basically consists of a regular
grid of cells, each in one of a finite number of states, such as 0 or 1. CA has
self-organizing behaviour for every cell according to some fixed rule from their
neighbours[1]. Cellular automata also works on the vertex colouring problem
by using dynamical system[7]. Some model and distribute algorithm have been
used to solve the vertex colouring problem, such as Irregular cellular learning
automata[1], dynamic colouring[7], etc.
In this report, we initialize the use of graph dynamical system to model a agent-
based computation for solving the vertex colouring problem. In this system, a
input graph is run by an Graph-cellular Automaton (GA), which is an extended
cellular automata. To do this, a global transition is made up by local transitions
of each vertex. Each vertex is distributed and locally run at each independent
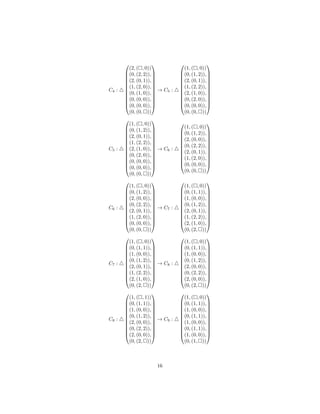
step. The proposed system is composed of a number of configurations, and the
each configuration of colouring is locally found for each vertex and its neigh-
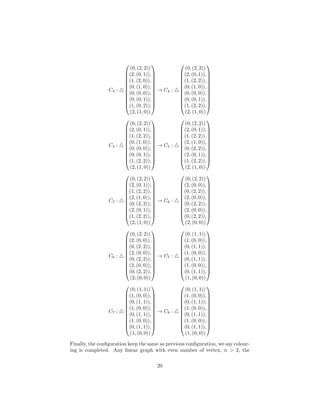
bours. Finally, if a configuration is same as previous configuration, we say the
system found a way to colour the graph. On the other hand, if a configuration
always is different from previous one and repeat varieties of configurations in
some way, we say the system is in a loop. Therefore, if the system found a
way to colour a graph, then the chromatic number of the graph is total size of
distinct state on the graph, otherwise we say the system might not find a good
way to colour the graph.
The structure of this report is as follows. In the next section, an overview
of the basic theory and proof on planar graph and colouring. Graph dynam-
ical system on graph colouring is introduced in Section 4. Also a model and
simulator of Graph-cellular automaton will be introduced in the second part
3](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-3-320.jpg)
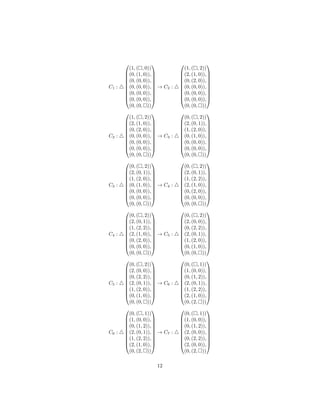
![of Section 4. The simulator perform various case studies to solving the vertex
colouring problem using graph dynamical system, such as linear graph, circle
graph, star graph, wheel graph and Peterson graph. For each case we focus on
a specific class of graph and investigate the use of graph dynamical systems on
these graphs.
2 Planar Graph and Colouring
Colouring graph is central to graph theory. In this section we introduce the
basic definition and terminology on graph colouring.
2.1 Planar Graph
Definition 2.1. (Planar Graph) A planar graph is a graph that can be drawn
on a plane surface in such a way that on two edges of it intersect (except for
intersections in vertices)[5].
Example 2.2. The complete graph K4 consists 4 vertices and with an edge
between every pair of vertices is planar. Figure 1a shows a representation of
K4 in a plane, which does not prove K4 is planar. Figure 1b shows that K4 is
planar graph.
(a) The planar graph K4 draw
with two edges intersecting.
(b) The planar graph K4 draw
without two edges intersecting.
Figure 1: Example of a planar graphs
Definition 2.3. (Face) The faces of plane graph G = (V, E) is the regions of
R2
G, which are subsets of R. Hence G is bounded. For Example, G lies inside
some adequately large disc D; exactly one of its faces is unbounded, the face
4](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-4-320.jpg)
![that contains R2
D. The outer face of G is the unbounded; the other faces are
inner faces. Every (finite) planar graph has exactly one infinite face[5].
We denote the set of faces of G by F(G).
Theorem 2.4. (Euler’s Formula) If we use v to denote the number of ver-
tices of a graph, e to denote the number of edges, and f to denote the number
of faces[5]. A connected plane graph with v(≥ 1) vertices, e edges and f faces
then
v − e + f = 2.
Example 2.5. The figure 2 shows a connected planar graph K4 consisting v = 4
vertices, e = 6 edges and f = 4 faces, where the face a, b and c is inner faces,
and d is the infinite outer face. Thus we have v − e + f = 4 − 6 + 4 = 2
a
b
c
d
(a) In the planar graph K4, the face a, b
and c are inner faces; The face d is the in-
finite outer face.
Figure 2
Proof. Basis: Consider the case e = 0. In this case, v must be 1 since G is
connected. With 1 vertex and no edges, there is exactly one outer faces. Thus
v − e + f = 1 − 0 + 1 = 2 as desired. Inductive step. Assume that the statement
is true for any connected planar graph with at most k edges. In other words,
for any connected planar graph G = (V, E) with v vertices, e ≤ k edges, and r
faces, v − e + f = 2. This is the inductive hypothesis. Suppose G = (V, E) is a
connected planar graph with v vertices, e = k + 1 vertices, and f faces.
If G is a tree, then e = v − 1.In addition, If G is a tree,then the only one face is
the outer face surround the tree so f = 1. Thus v − e + f = v − (v − 1) + 1 = 2
as desired.
If G is not a tree, then G has some cycle, which we use C to denote the cycle. Let
e be any edge in C, and consider a subgraph G = (V, E {e}) of G. G must be
5](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-5-320.jpg)
![connected because removing an edge from a cycle breaks the cycle but does not
break the connectivity of the graph. Furthermore, G has one fewer face than G
because removing an edge merges two faces into one face. Because subgraph of
a planar graph is also planar and |E| = e = k+1, G is a connected planar graph
with |E {e}| = k edges. Thus the inductive hypothesis applies to G to yield
v−k+(f −1) = 2. Therefore, v−e+f = v−(k+1)+f = v−k+(f −1) = 2.
Lemma 2.6. If a connected planar graph G = (V, E) has more than 2 vertices,
|V | ≥ 2, then |E| ≤ 3|V | − 6.[3]
Proof. If the number of edges is less or equal to 3, |E| ≤ 3, and |V | > 2, then
the theorem can be verified directly.
Otherwise, because the number of edges is bigger than 3, every face is bounded
by at least 3 edges. In addition, every edge bounds at most 2 faces. Thus,
3|F| 2|E|, so |F| 2|E|
3 or r 2e
3 .
Apply the relation and substituting it into Euler’s formula[2.4], v − e + f = 2,
we get v − e + 2e
3 2. This implies that 3v − e 6 or |E| ≤ 3|V | − 6, and the
lemma is proved.
Theorem 2.7. The complete graph K5, is not a planar graph[5]
Figure 3: The non-planar graph K5
Proof. Suppose graph K5 is a planar graph. So, the graph K5 have |V | = 5
vertices, |E| = 10 edges. We know e 3v − 6 from Lemma[2.6]. So, if v = 5
then 3 × 5 − 6 = 9. However, 10 9, and the theory is proved.
Theorem 2.8. The complete bipartite graph with three vertices on each side,
K3,3 is not a planar graph [5]
Proof. Assume that K3,3 is planar graph. K3,3 has 6 vertices and 9 edges. Let
F be the set of faces in the planar representation of K3,3. By Euler’s Formula
2.4, we have |F| = 2 − |V | + |E| = 2 − 6 + 9 = 5.
Consider the set B = {(v, f) ∈ V × F|v is on the border of f}. We bound
6](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-6-320.jpg)
![Figure 4: The non-planar graph K3,3
its size in two different ways.
Every face has a cycle as its border. Note that the shortest this cycle can
be is 4. It cannot be 1 or 2 for the same reason as in the previous proof. More-
over, it cannot be 3 because K3,3 is bipartite. Every cycle begins and ends at
the same vertex, and edges go between vertices in two different halves of the
graph. Thus, after 3 steps, a path cannot end in the same half of the vertex set
as the half where it started. But after four steps, it can, and in that case the
path visits three more vertices in addition to the starting/ending one. Hence,
we have
|B| =
f∈F
(number of vertices on f’s border) ≥
f∈F
4 = 4|F| = 20.
Second, each vertex of K3,3 has degree at 3. Each face that has v on its border
must have at least two edges incident on v as its border. There are three ways
to form a pair out of three edges, so v can be on the boundary of at most 3
faces. It follows that
|B| =
v∈V
(number of faces with v on their border) ≤
v∈V
3 = 3|V | = 18.
So we see that |B| ≥ 20, and also |B| ≤ 18. This cannot happen, so the
assumption that K3,3 is planar is wrong, and we have that K3,3 is not planar.
2.2 Graph Colouring
Definition 2.9. (Colouring Graph) A proper colouring of a graph G =
(V, E) using a set C is a function f : V → C , where C is a set of colours, such
that f(vi) = f(vj) for ∀vi,vj
∈ E. Therefore, every two adjacent vertices have
different colour allocations[5]. We can label colours on vertex with numbers in
following sections.
A graph which has a proper colouring C. We define the size of C as a integer
k where |C| = k, such that the graph G has a k-colouring.
7](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-7-320.jpg)
![Definition 2.10. (The chromatic number of a graph G) The chromatic
number of a graph G is the size of a smallest set C for there is a proper colouring
of G with C; it is denoted by χ(G)[3].
A graph G which has χ(G) = k is said to be k-chromatic; if χ(G) k, we
call G k-colourable[5].
Definition 2.11. (Independent set) An in a graph G = (V, E) is a subset
U ⊆ V such that no two vertices in U are adjacent in G.
We denote the independence set number α(G) is the size of the largest in-
dependent set.
Definition 2.12. (Dominating set) The dominating set of a graph G =
(V, E) is a subset D ⊆ V such that every vertex in V is either in D or adjacent
to vertex in D.
We denote the domination number γ(G) is the size of the smallest indepen-
dent set.
3 Graph Dynamical System
In this section, we introduce a model of graph dynamical system, Graph-cellular
Automaton(GA), for solving vertex colouring. Graph-cellular Automaton is
an expended cellular automaton. The restriction of regular grid structure in
tradition cellular automaton is removed. Each vertex in a graph has self-
organization by using graph-cellular automaton. The proper vertex colouring is
distributed and locally assigned to each vertex according to neighbours of the
vertex. Graph-cellular automaton synchronously select vertex colouring on the
graph.
3.1 basic problem
Definition 3.1. Let a graph G = (V, E) be a undirected graph, we use dg for
the degree of G. For every u ∈ V , we denote the set of neighbour by N(v).
The system is based on the colours selected by adjacent vertices of vertices.
The system need to collect neighbours for all vertex.
Definition 3.2. A local orientation is a function µ : V × [1, dg] → (V ∪ { })
where /∈ V and for all v ∈ V . Thus we have rules:
1. N(v) ⊆ {µ(v, i)|i = 1, 2, . . . , dg} ⊆ N(v) ∪ { }
8](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-8-320.jpg)





















![References
[1] Javad Akbari Torkestani and Mohammad Reza Meybodi. A cellular learn-
ing automata-based algorithm for solving the vertex coloring problem. Ex-
pert Systems with Applications, 38(8):9237–9247, 2011.
[2] Nicolas Barnier and Pascal Brisset. Graph coloring for air traffic flow man-
agement. Annals of operations research, 130(1-4):163–178, 2004.
[3] Kenneth P Bogart. Introductory combinatorics. Saunders College Publish-
ing, 1989.
[4] Preston Briggs. Register allocation via graph coloring. PhD thesis, Rice
University, 1992.
[5] Reinhard Diestel. Graph theory. 2005, 2005.
[6] Marek Kubale. Graph colorings, volume 352. American Mathematical Soc.,
2004.
[7] Bruce Montgomery. Dynamic coloring of graphs. PhD thesis, West Virginia
University, 2001.
[8] Palash Sarkar. A brief history of cellular automata. ACM Comput. Surv.,
32(1):80–107, March 2000.
[9] Michael Sipser. Introduction to the Theory of Computation, volume 2.
Thomson Course Technology Boston, 2006.
[10] Stephen Wolfram. Cellular automata and complexity: collected papers, vol-
ume 1. Addison-Wesley Reading, 1994.
35](https://image.slidesharecdn.com/98b00492-d864-4139-bbee-b8b7db8bf472-151126212440-lva1-app6891/85/Graph-Dynamical-System-on-Graph-Colouring-35-320.jpg)

This document discusses using a graph dynamical system to model the vertex coloring problem. It proposes using a Graph-cellular Automaton (GA), which is an extension of cellular automata, to distribute the coloring process. In the GA model, each vertex independently chooses its optimal color based on the colors of its adjacent vertices. The document outlines testing the GA approach on different types of graphs and analyzing whether it can find colorings for them. It provides background on graph coloring, planar graphs, and introduces the graph dynamical system and GA models.