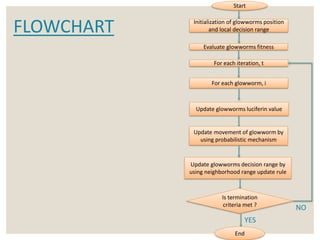
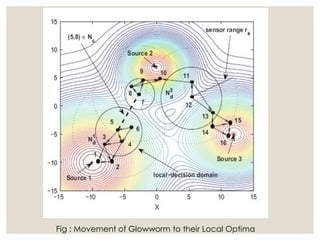
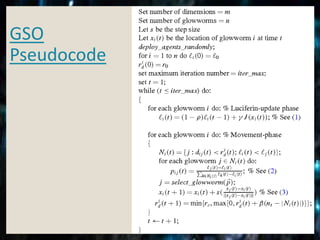
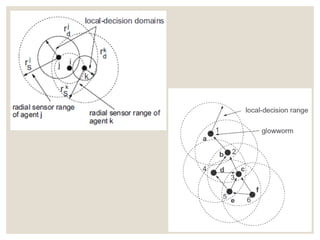
The document presents the Glowworm Swarm Optimization (GSO) algorithm, which is based on swarm intelligence and inspired by the behavior of glowworms interacting through luciferin emission. It outlines the steps of the algorithm, including luciferin level updates, movement phases, and neighborhood range updates, as well as its applications in detecting sources, localization, and solving different problems. Additionally, it references various studies and implementations related to the GSO methodology.