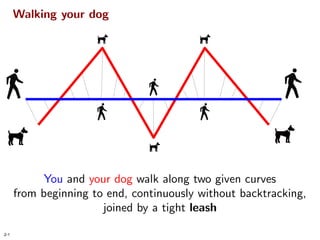
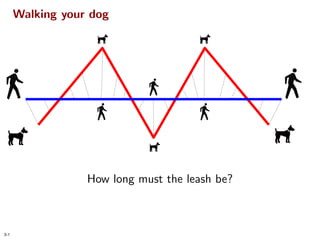
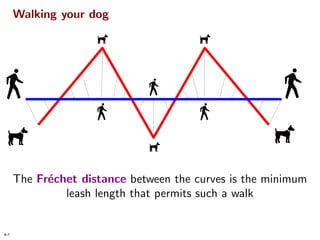
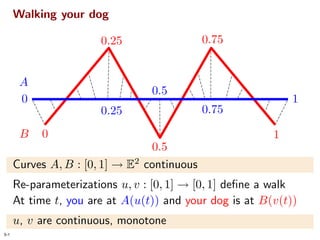
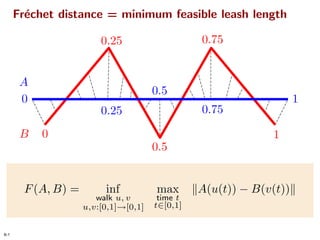
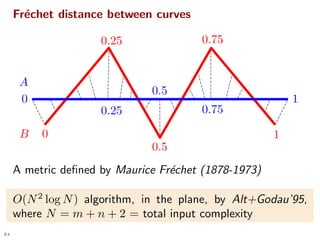
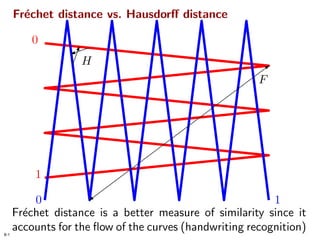
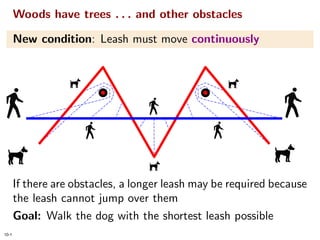
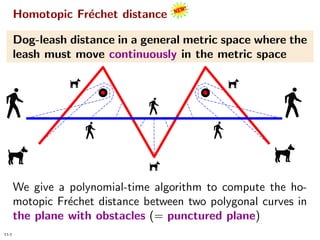
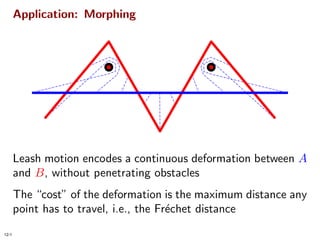
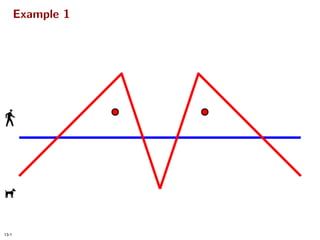
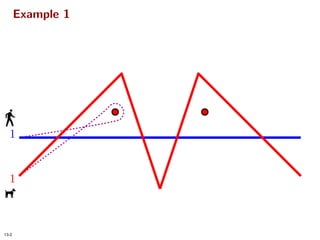
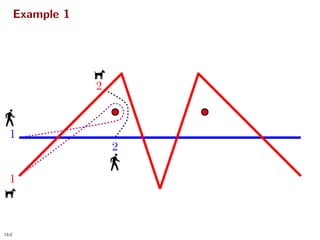
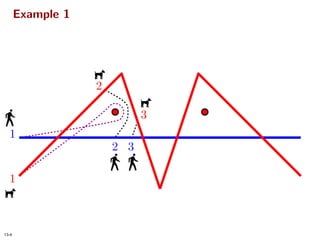
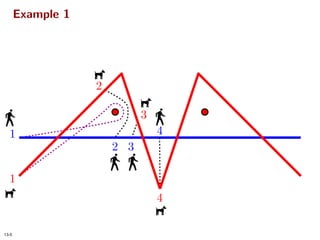
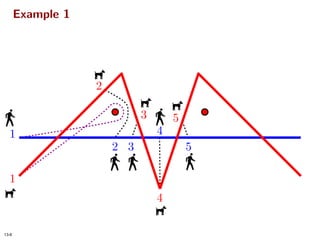
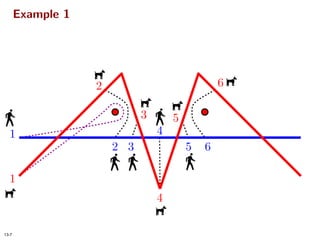
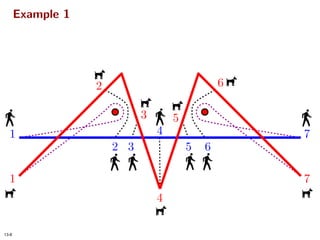
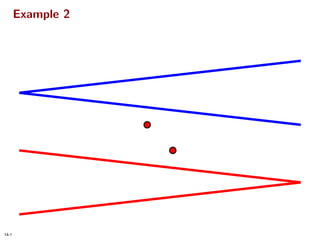
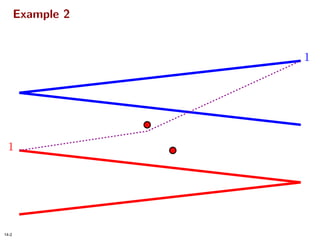
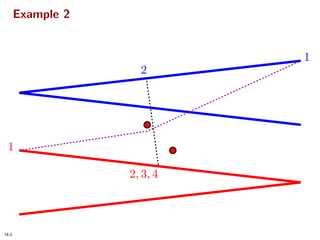
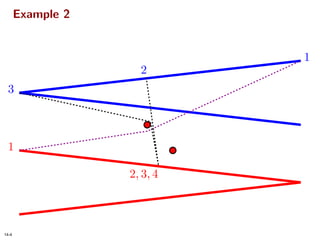
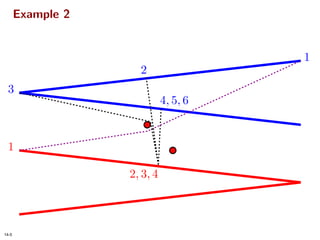
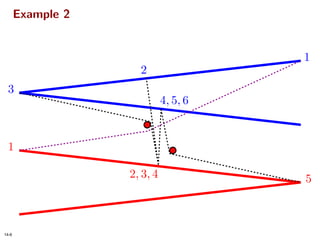
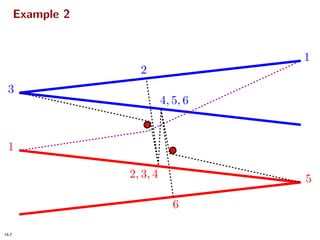
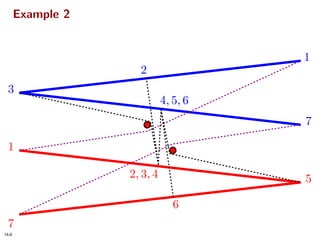
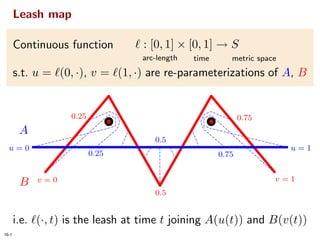
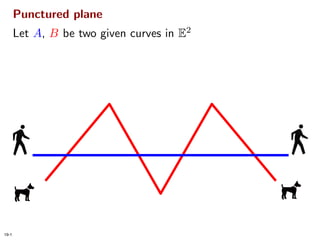
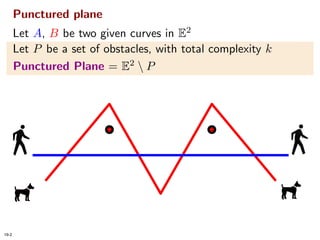
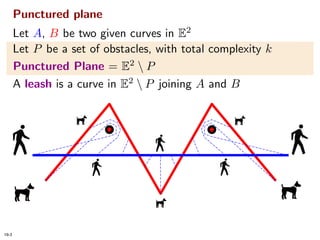
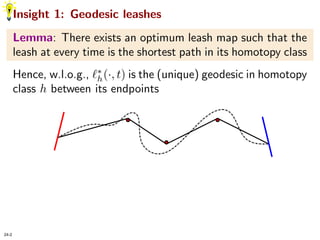
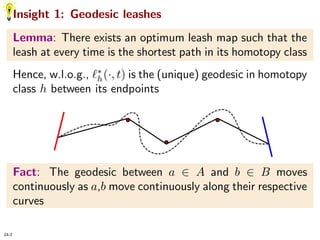
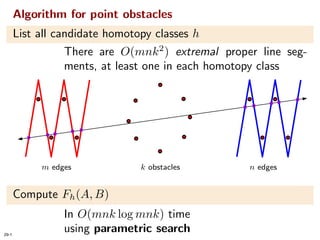
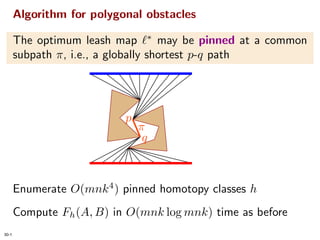

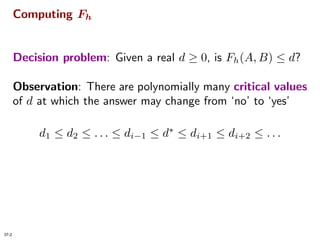
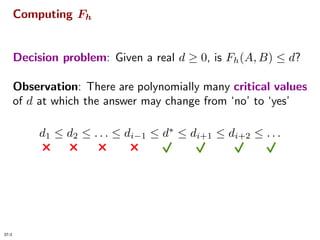
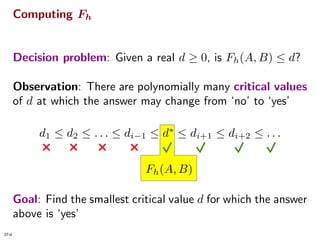
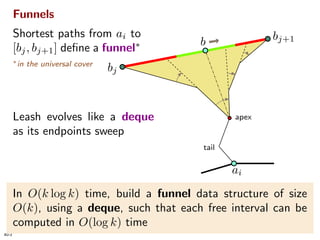
The document discusses the concept of walking a dog along two curves in a continuous manner, while maintaining a leash, and introduces the Fréchet distance as the minimum leash length required for such a walk. It further explores the complexities introduced by obstacles and presents a polynomial-time algorithm to compute the homotopic Fréchet distance between polygonal curves in a punctured plane. The paper concludes with insights into the optimal leash paths and includes details on algorithms for specific conditions involving point and polygonal obstacles.