
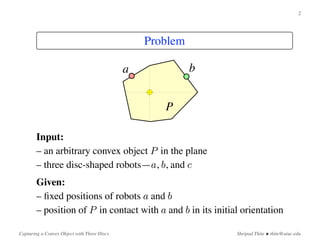
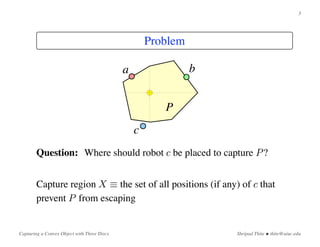
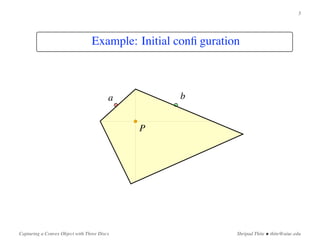
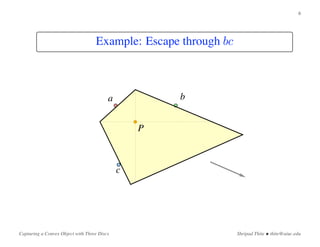
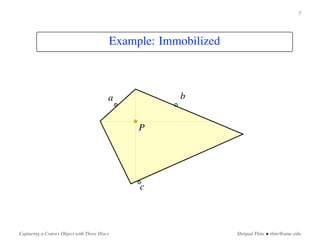
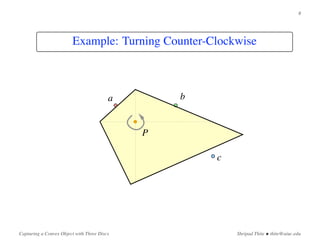
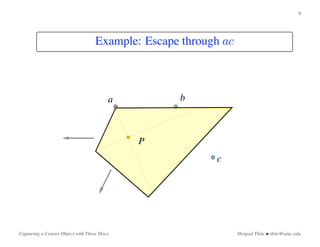
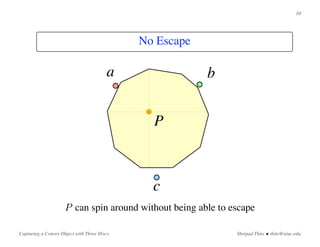
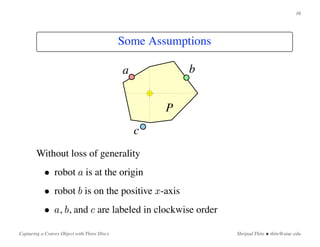
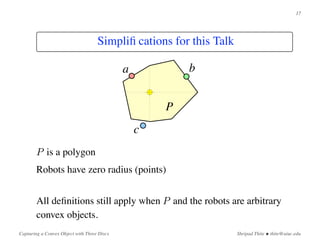
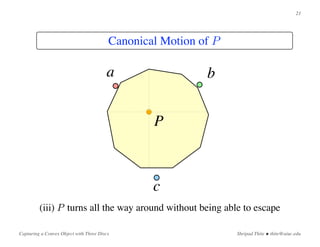
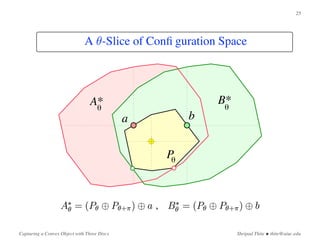
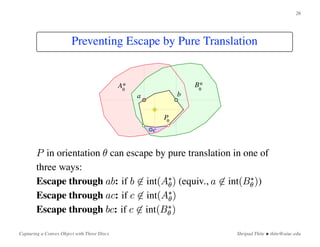
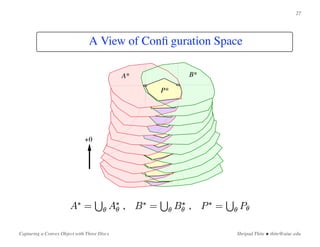
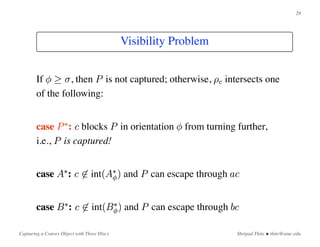
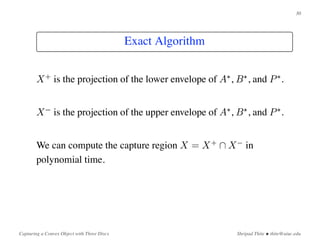
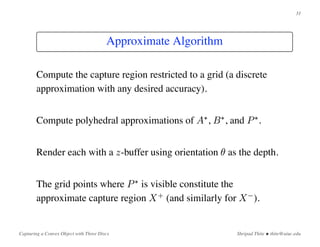
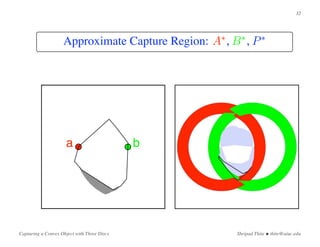
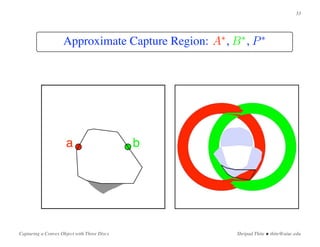
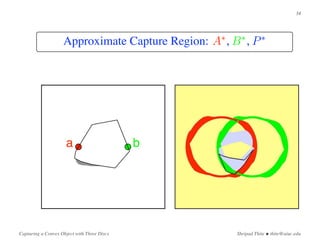


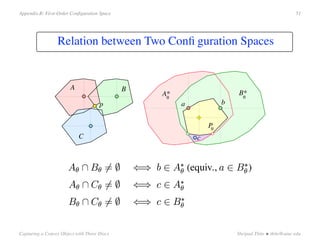
This document describes research into using three disc-shaped robots to capture a convex object in the plane. It presents the problem, assumptions made, and provides examples of initial configurations where the object can escape and where it is immobilized. An algorithm is described to compute the "capture region" - all positions for the third robot that prevent the object from escaping. Both exact and approximate algorithms are presented and directions for future work are discussed.















































