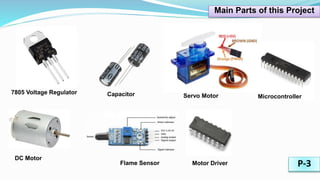
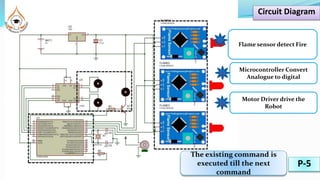
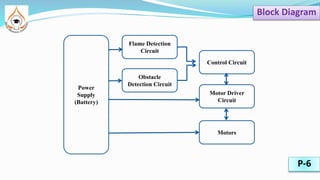
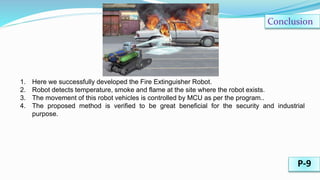
The document outlines the design and implementation of a fire-fighting robot developed by students at North Western University, highlighting its motivation, components, and operational flow. The robot utilizes a flame sensor, microcontroller, and motor systems to detect and extinguish fires autonomously. Future improvements include enhancing the power source and sensor accuracy, as well as integrating a GSM module for connectivity.