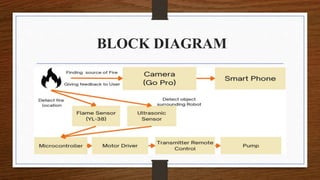
The project aims to design a fire extinguisher robot capable of autonomously detecting and extinguishing fires in hazardous environments, utilizing various sensors, a water tank, and a microcontroller for navigation and obstacle avoidance. The development process includes system design, hardware and software development, integration and testing, followed by real-world deployment and evaluation. The robot is intended for use in areas where human firefighters cannot safely operate, such as tunnels and industrial sites.