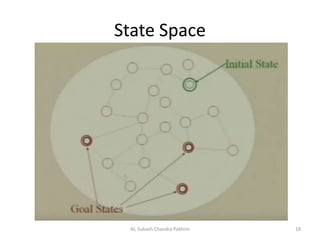
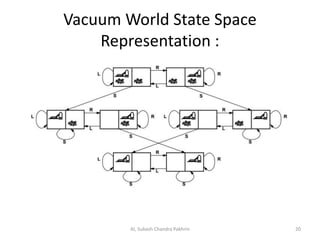
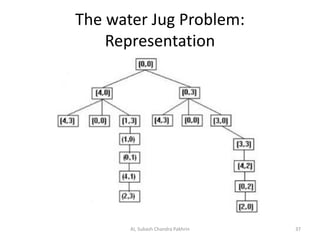
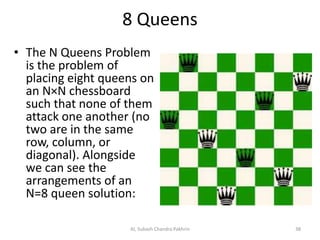
The document provides an introduction to state space search problems and algorithms. It discusses key concepts like the state space representation, initial and goal states, actions/operators that transform states, and different search strategies. Specific examples covered include the vacuums world problem, towers of Hanoi, water jugs problem, and the 8 queens puzzle. The document also introduces production systems and how they can be used to represent state space search problems.


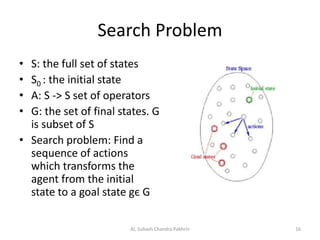
![Search Through a state space
• Input
– Set of states
– Operators [and costs]
– Start state
– Goal state [test]
• Output
– Path: start => a state satisfying goal test
– [May require shortest path]
AI, Subash Chandra Pakhrin 46](https://image.slidesharecdn.com/finalslidebsccsitchapter3-190509193055/85/Final-slide-bsc-csit-chapter-3-46-320.jpg)