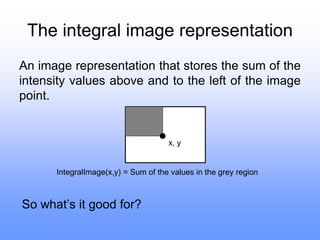
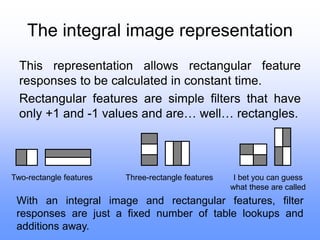
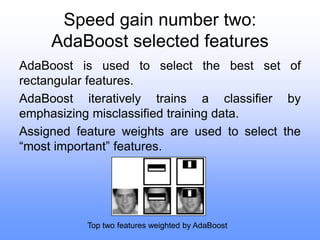
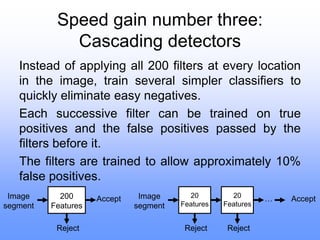
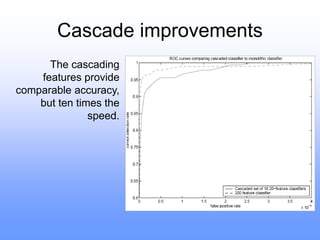
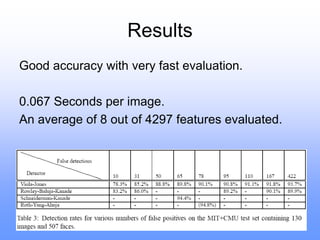
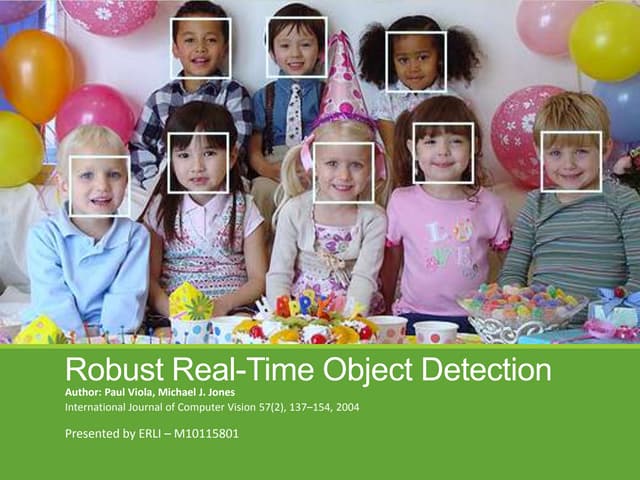
The document discusses a method for real-time object detection using a cascade of classifiers with three main speed gains: 1) Using an integral image representation allows constant-time calculation of rectangular filter responses; 2) AdaBoost is used to select the most effective small set of rectangular features; 3) Classifiers are cascaded so that easy negatives can be quickly eliminated, requiring evaluation of only a small number of features per image. The resulting detector achieves face detection at 0.067 seconds per image with good accuracy by evaluating an average of only 8 features per image.