The document describes Ethernet communication between a robot and an external system using TCP/IP. Key points:
- The external system acts as a TCP server, while the robot acts as a client.
- The server listens for requests from the robot client and responds with an XML data packet. It also receives an XML response from the robot.
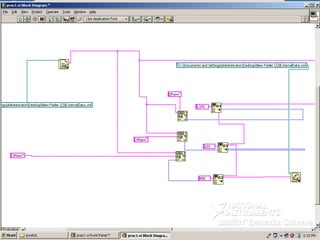
- A main VI continuously waits for an incoming connection, reads the external data file, sends it to the robot, and receives a response to trigger a sub-VI.
- The sub-VI updates the coordinate values in the external data file based on joystick input, writes the new file, and triggers sending the updated data to the robot.