Download as PDF, PPTX
![The SoftRobot Architecture
Robot Domain-Specific Service-Oriented
Applications Languages Automation
Programming
Application
[Angerer2010]
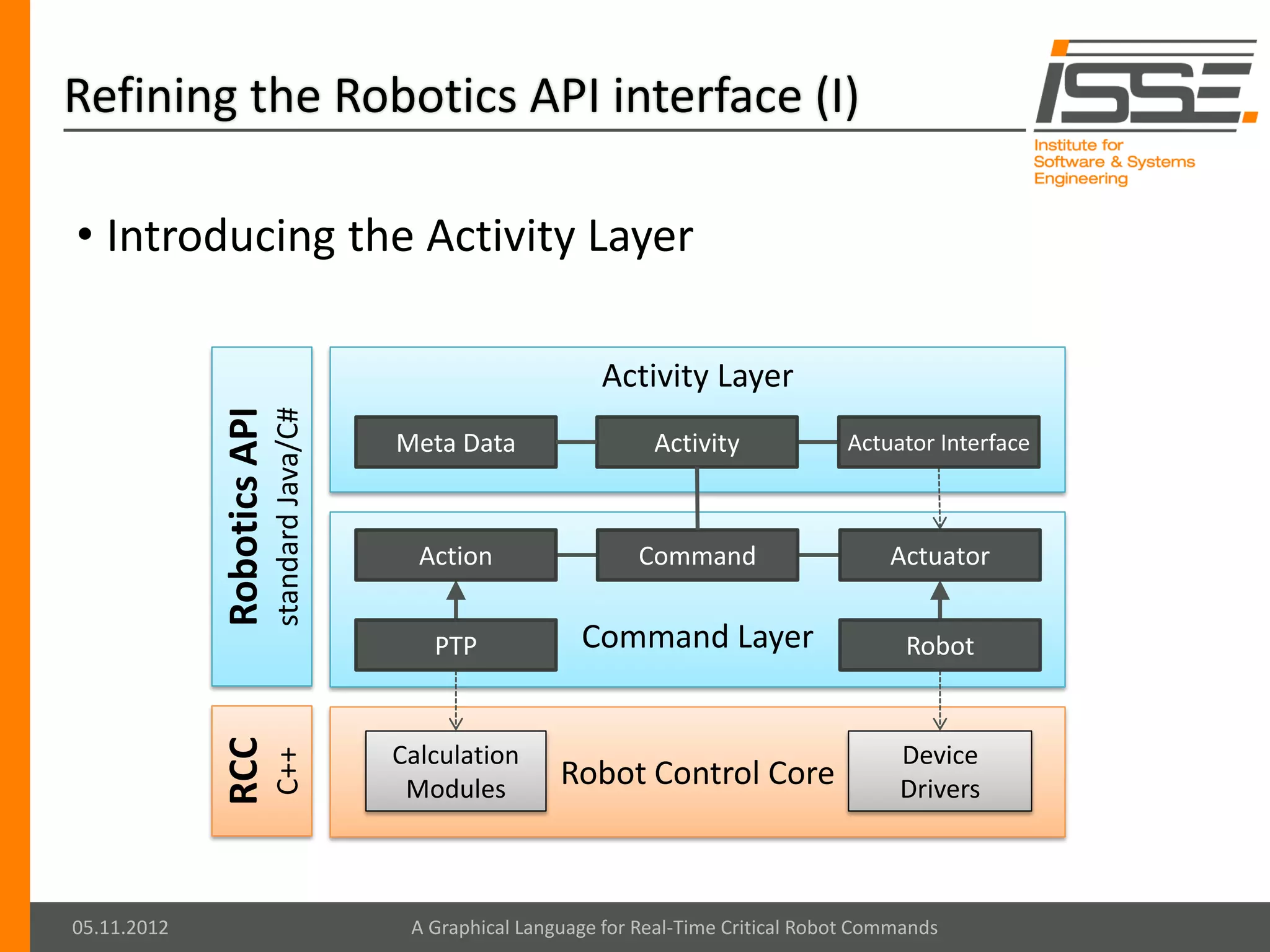
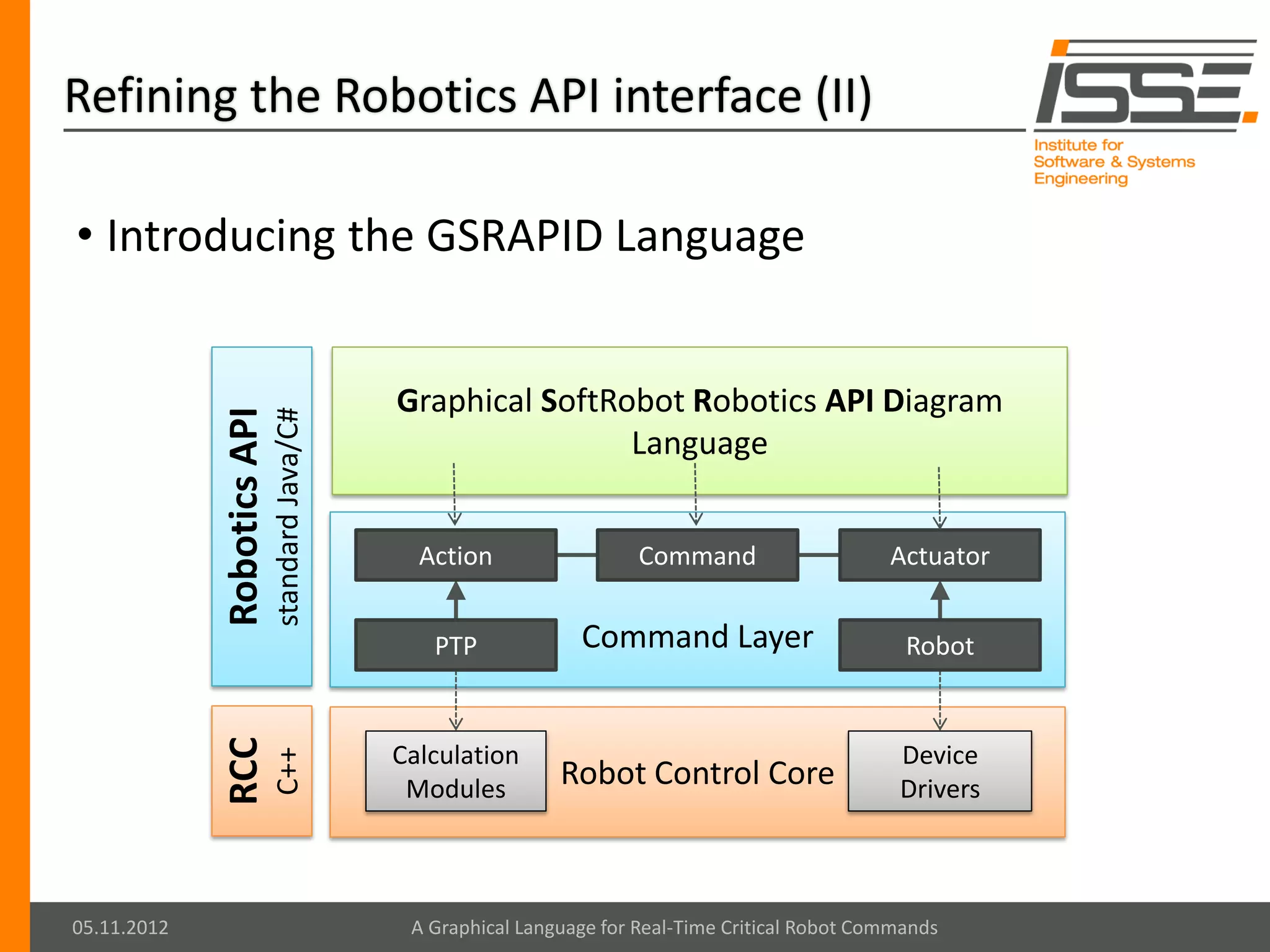
Robotics API
(standard Java/C#)
Automated
transformation
into real-time
Realtime Primitives Interface dataflow graphs
[Schierl2012]
Robot Control
Robot Control Core
Real-Time
(C++, Linux/RTAI) [Vistein2010]
Robot Hardware
05.11.2012 A Graphical Language for Real-Time Critical Robot Commands](https://image.slidesharecdn.com/2-agraphicallanguageforreal-timecriticalrobotcommands-pdf-121120145049-phpapp01/75/A-Graphical-Language-for-Real-Time-Critical-Robot-Commands-5-2048.jpg)

![References
[Angerer2010] Angerer, A.; Hoffmann, A.; Schierl, A.; Vistein, M. & Reif, W.
The Robotics API: An Object-Oriented Framework for Modeling Industrial Robotics Applications
Proc. 2010 IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS2010), Taipeh, Taiwan,
IEEE, 2010, 4036-4041
[Vistein2010] Vistein, M.; Angerer, A.; Hoffmann, A.; Schierl, A. & Reif, W.
Interfacing Industrial Robots using Realtime Primitives
Proc. 2010 IEEE Intl. Conf. on Automation and Logistics (ICAL~2010), Hong Kong, China, IEEE,
2010, 468-473
[Schierl2012] Schierl, A.; Angerer, A.; Hoffmann, A.; Vistein, M. & Reif, W.
From Robot Commands To Real-Time Robot Control - Transforming High-Level Robot Commands
into Real-Time Dataflow Graphs
Proc. 2012 Intl. Conf. on Informatics in Control, Automation and Robotics, Rome, Italy, 2012
05.11.2012 A Graphical Language for Real-Time Critical Robot Commands](https://image.slidesharecdn.com/2-agraphicallanguageforreal-timecriticalrobotcommands-pdf-121120145049-phpapp01/75/A-Graphical-Language-for-Real-Time-Critical-Robot-Commands-27-2048.jpg)

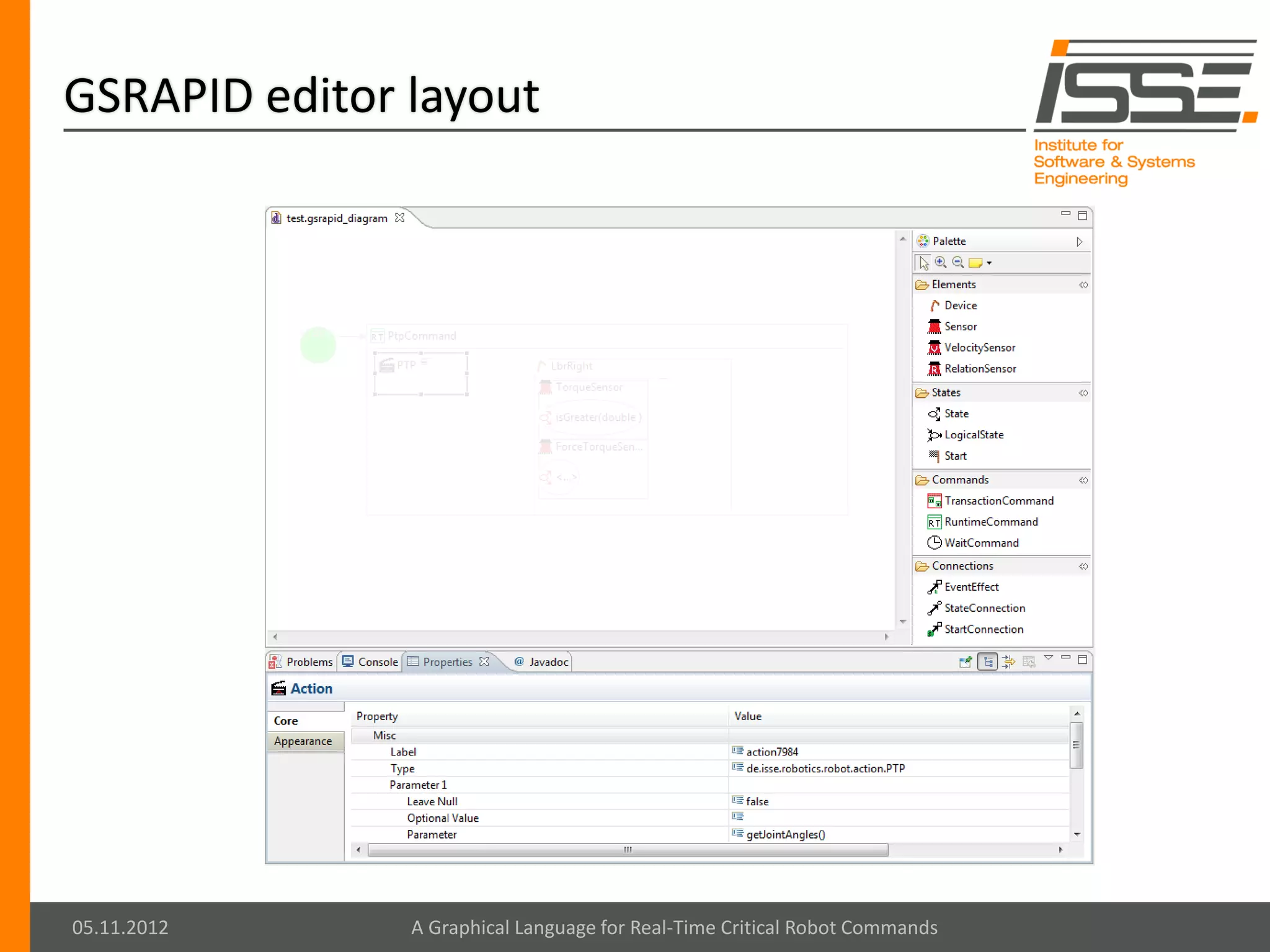
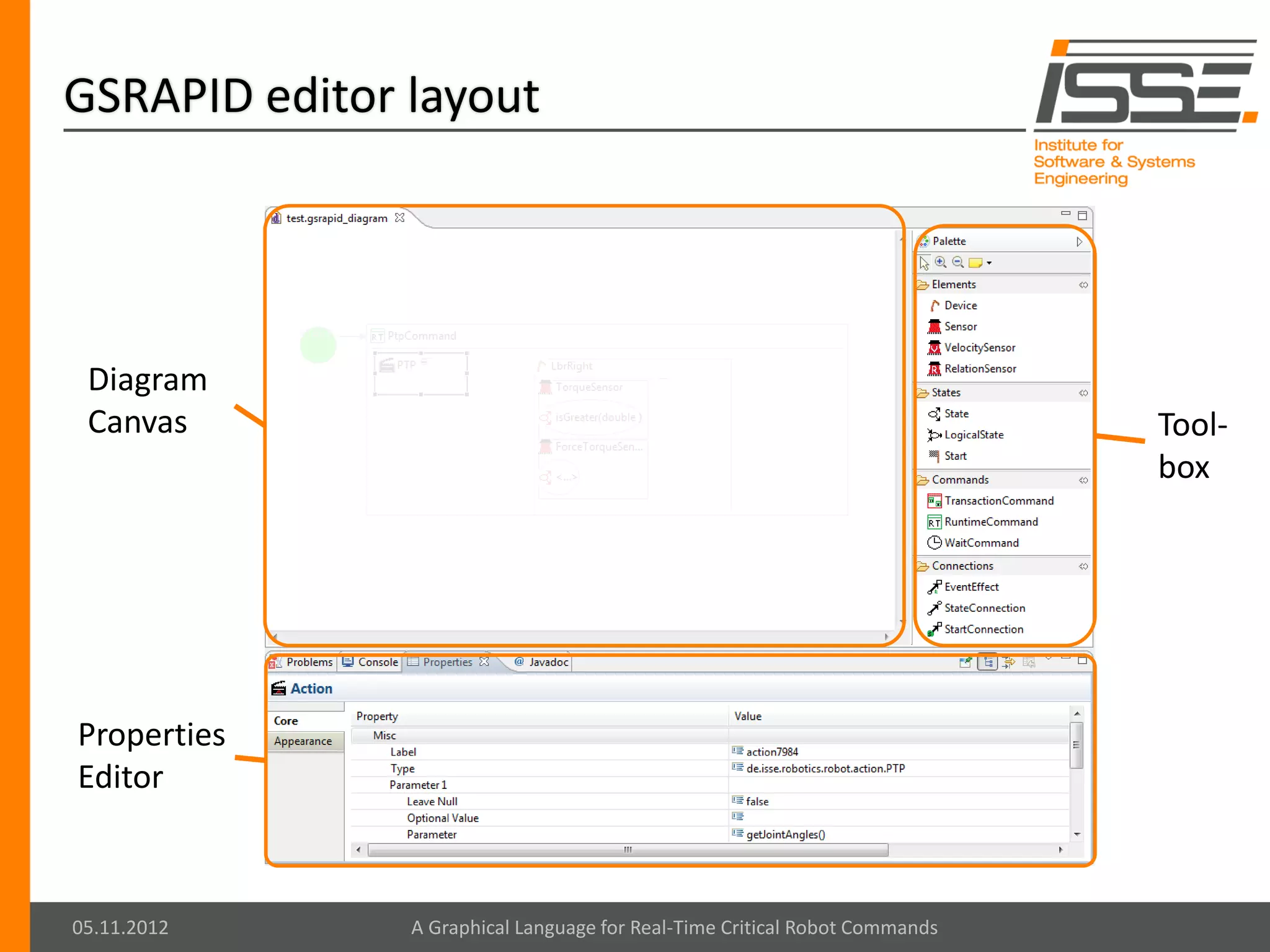
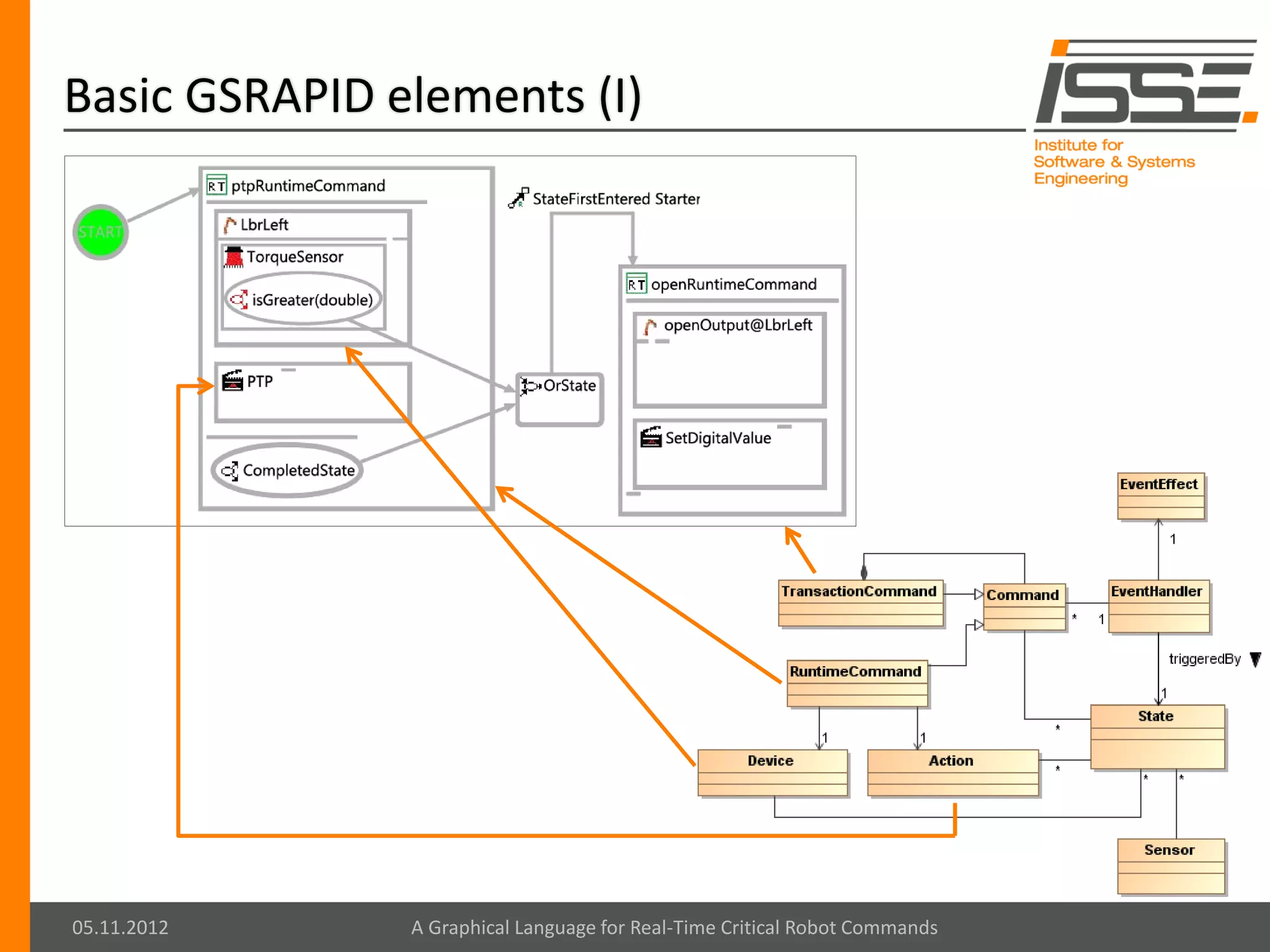
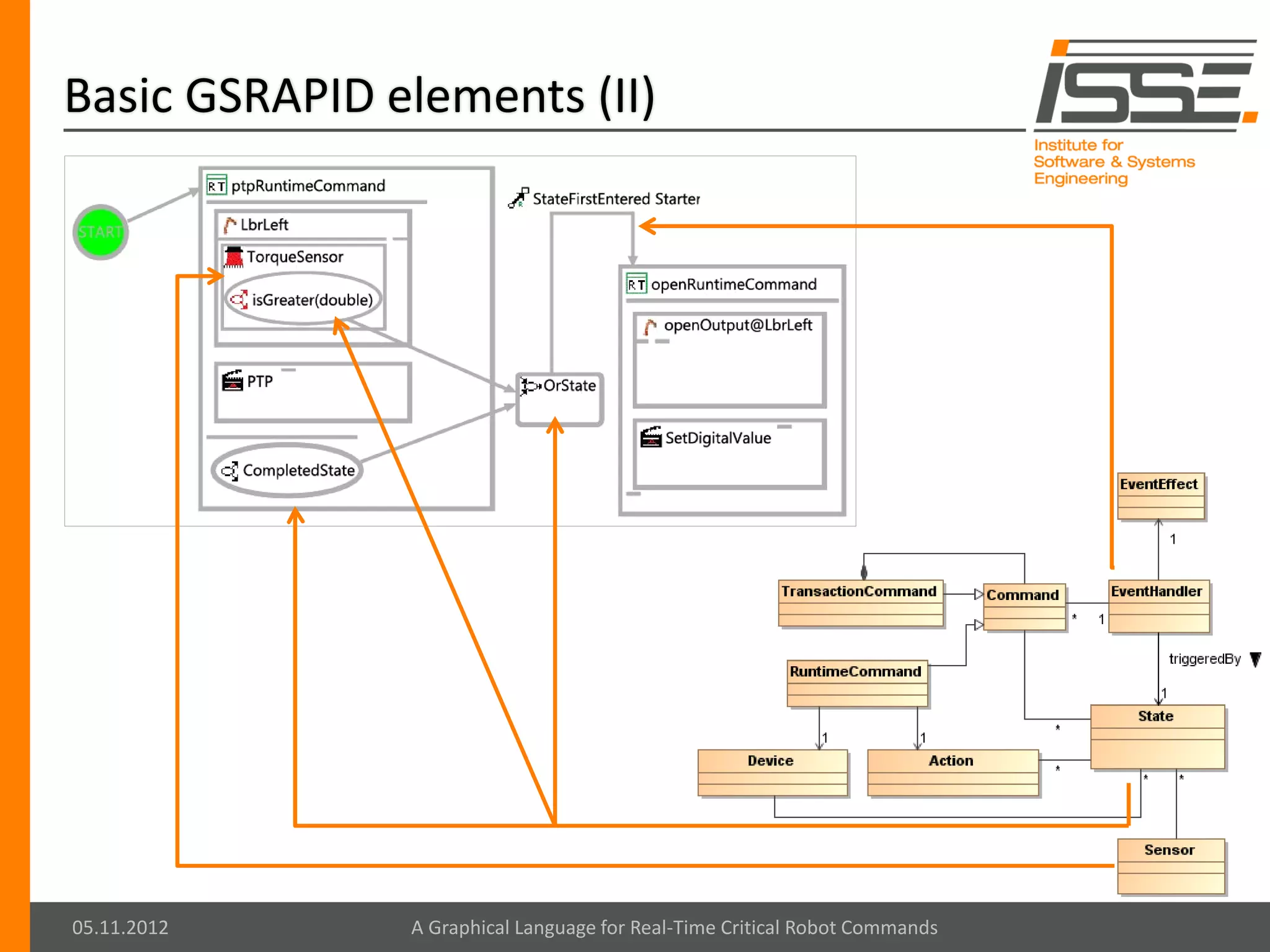
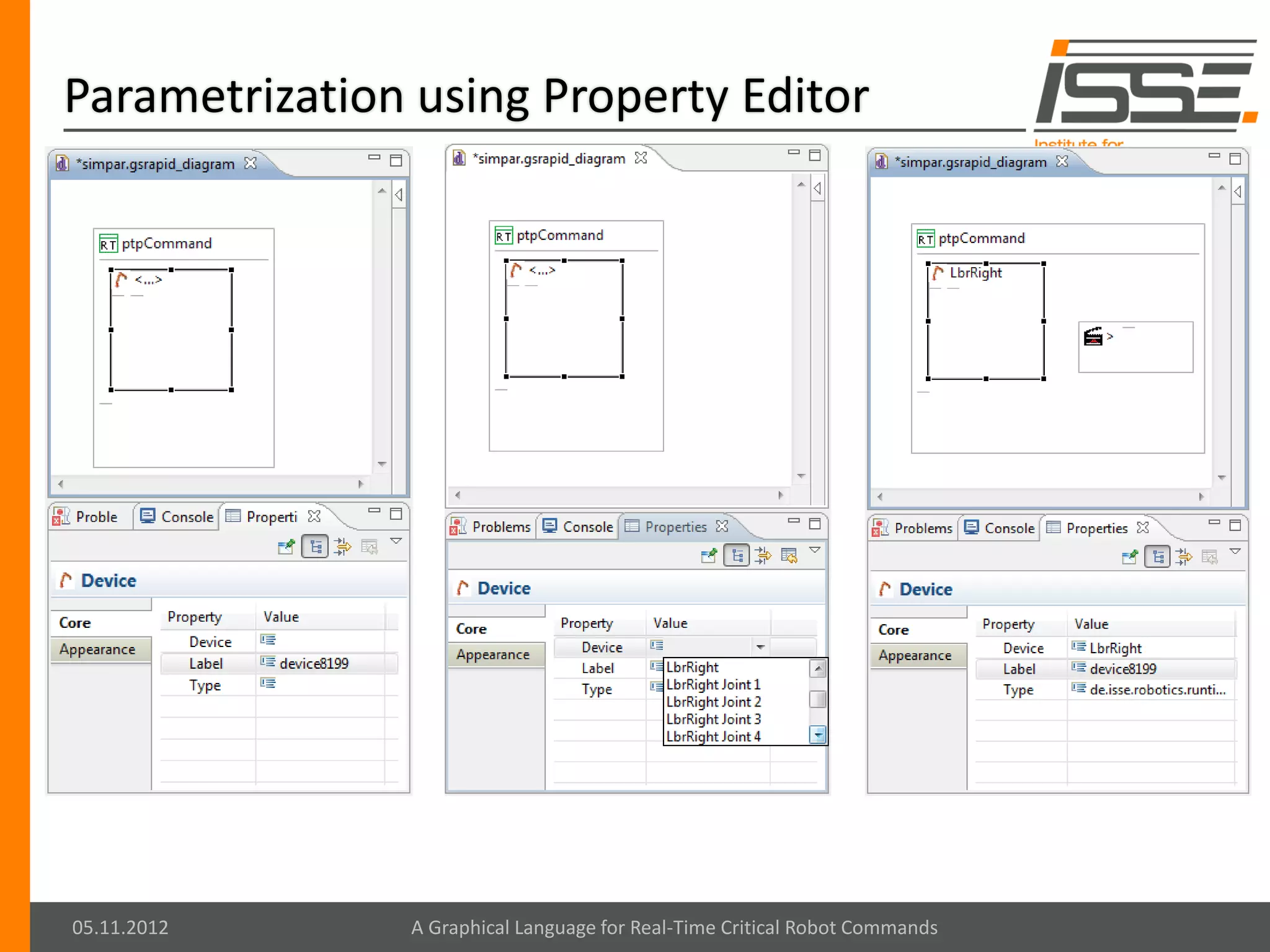
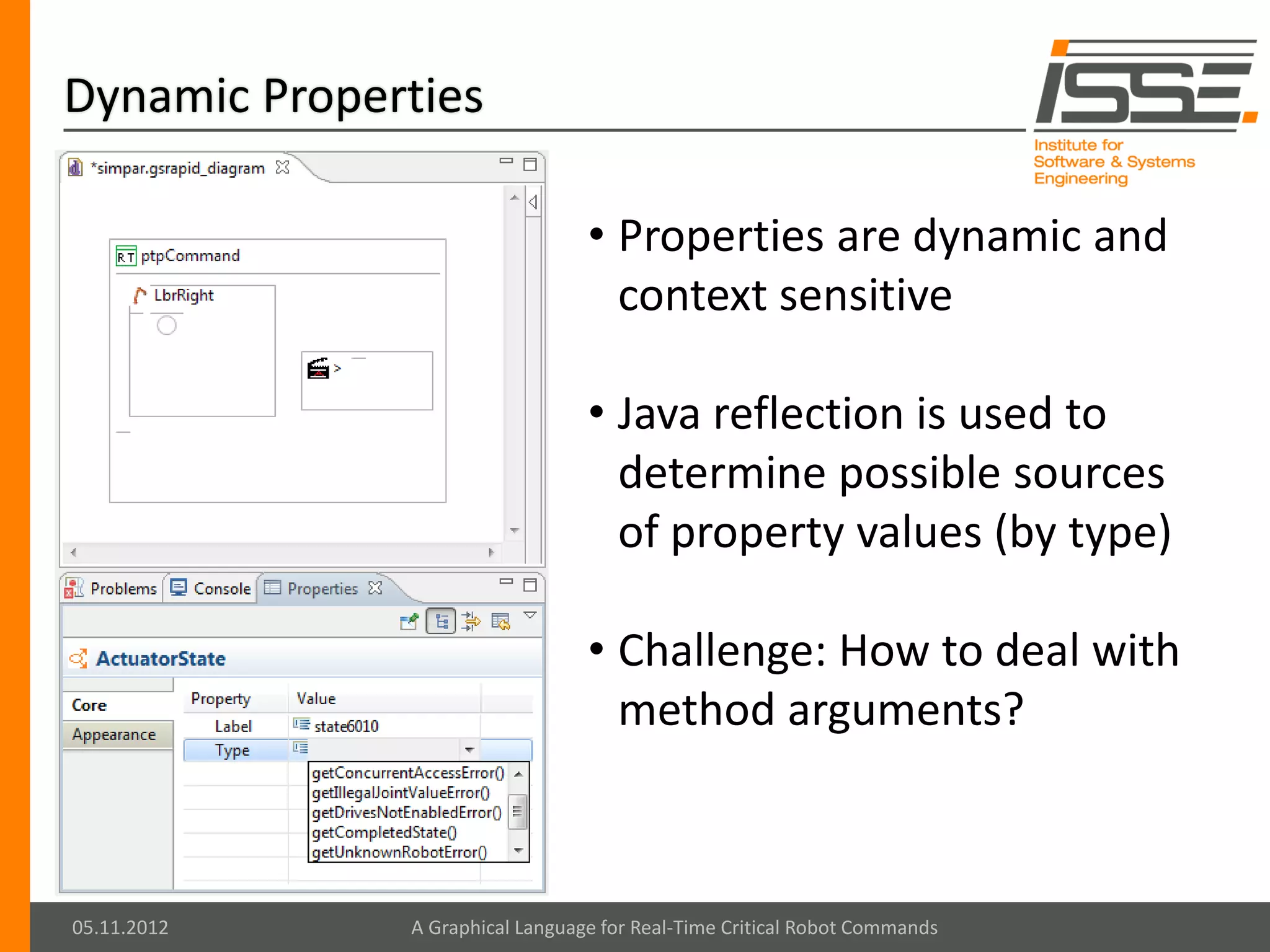
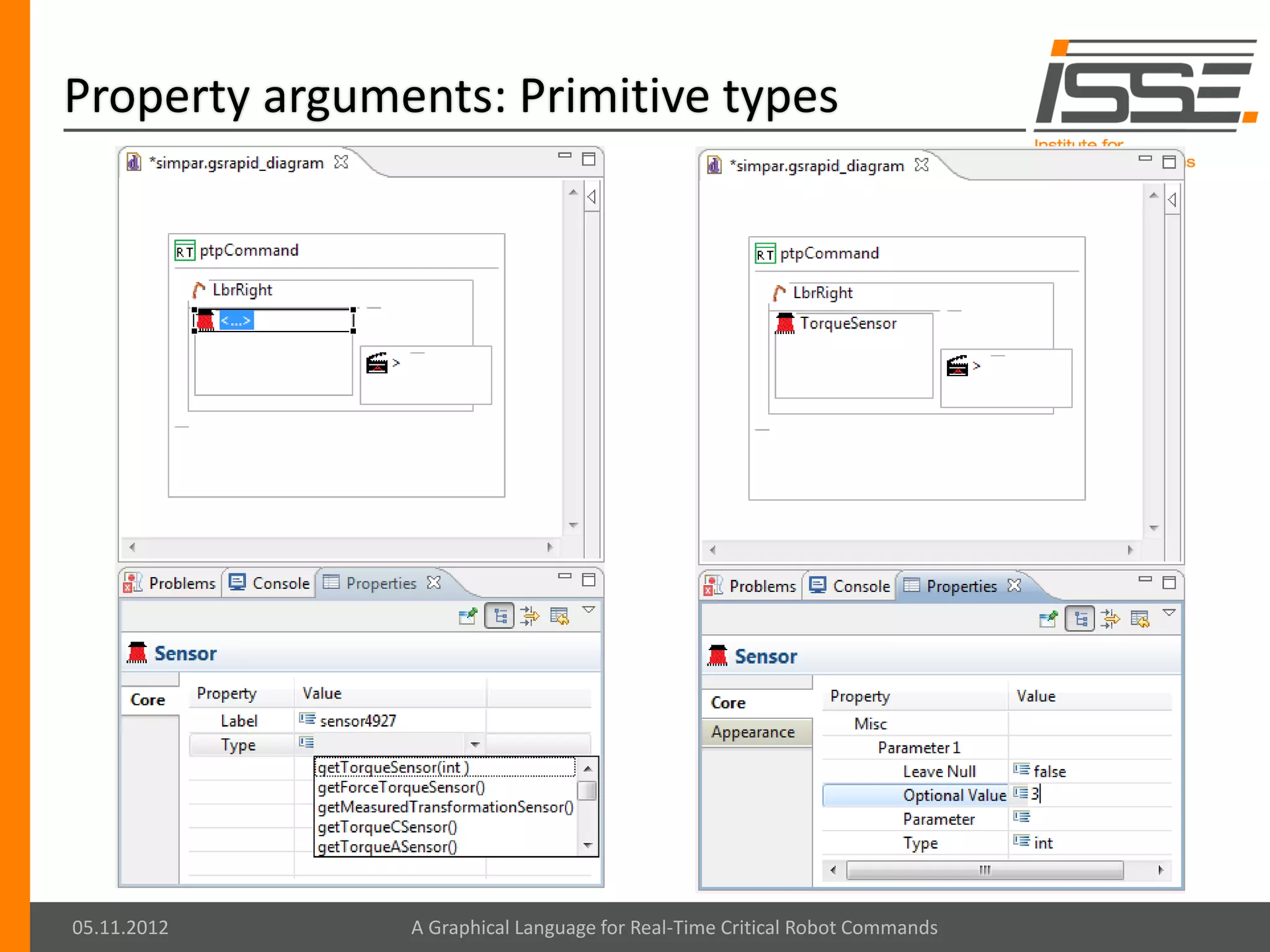
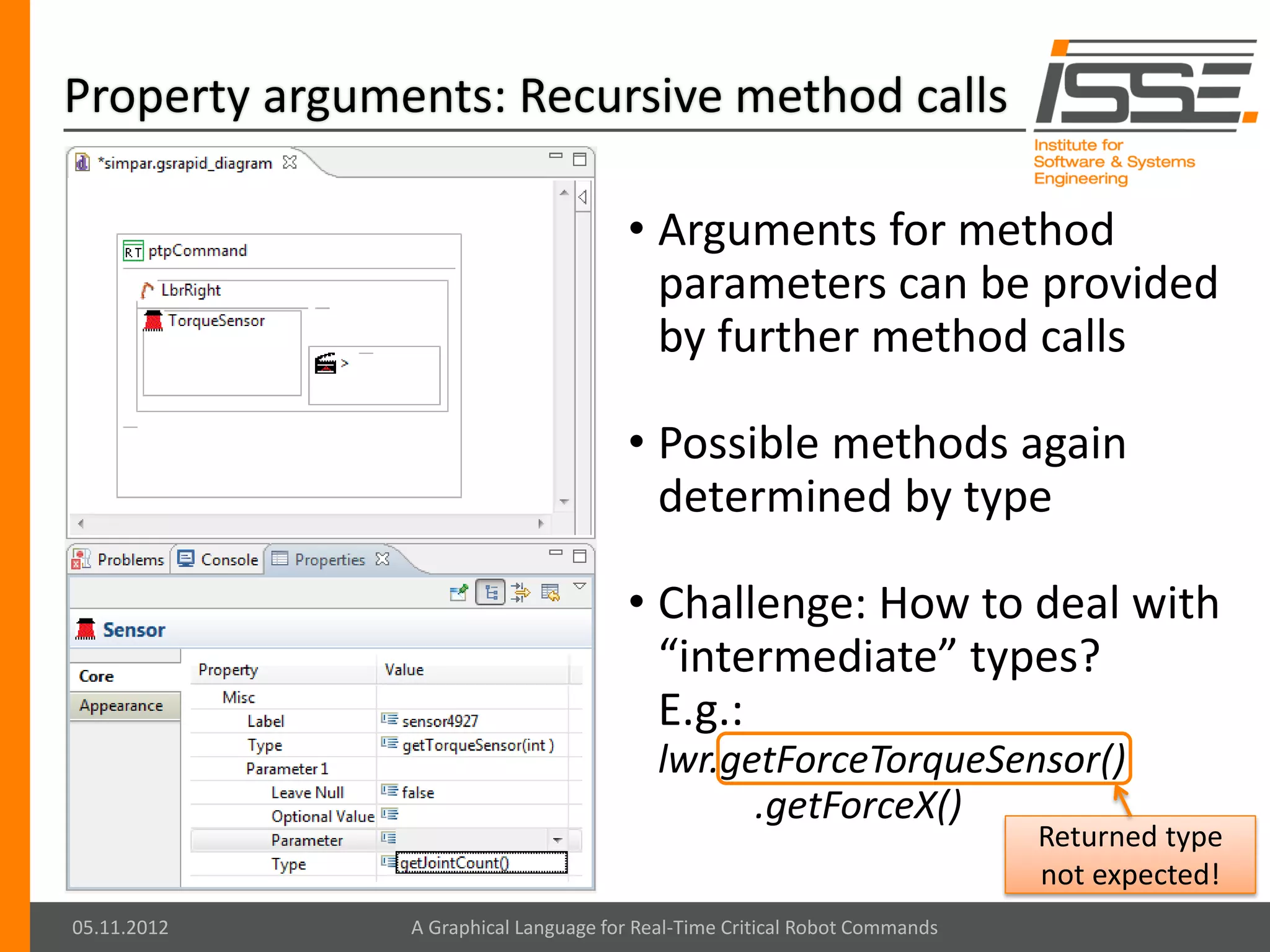
The document discusses a graphical language called GSRAPID for specifying complex robot commands. GSRAPID allows creating diagrams that define robot commands which are then compiled into Java code. It uses a model where robot commands are represented as nodes and connections in a graph. The language is implemented as an Eclipse plugin using the Graphical Modeling Framework. It allows parametrizing robot commands through a property editor and handles parameters that require method calls or variables through an interface called ISetter.